Quản lý đỗ xe sử dụng Ultralytics YOLO26 🚀
Hệ thống quản lý bãi đậu xe là gì?
Quản lý bãi đỗ xe với Ultralytics YOLO26 đảm bảo việc đỗ xe hiệu quả và an toàn bằng cách tổ chức các vị trí và giám sát tình trạng trống/đầy. YOLO26 có thể cải thiện quản lý bãi đỗ xe thông qua tính năng phát hiện phương tiện theo thời gian thực và cung cấp thông tin chi tiết về tình trạng chiếm dụng bãi đỗ.
Xem: Cách xây dựng hệ thống quản lý bãi đậu xe với Ultralytics YOLO26 | Phát hiện điểm theo thời gian thực 🚗
Ưu điểm của Hệ thống Quản lý Bãi đỗ xe
- Hiệu quả: Quản lý bãi đậu xe tối ưu hóa việc sử dụng không gian đỗ xe và giảm tắc nghẽn.
- An toàn và Bảo mật: Quản lý bãi đỗ xe sử dụng YOLO26 cải thiện an toàn cho cả người và phương tiện thông qua các biện pháp giám sát và an ninh.
- Giảm Phát thải: Quản lý bãi đỗ xe sử dụng YOLO26 điều tiết luồng giao thông để giảm thiểu thời gian chờ và lượng khí thải trong bãi đỗ xe.
Các ứng dụng thực tế
| Hệ thống quản lý bãi đỗ xe | Hệ thống quản lý bãi đỗ xe |
|---|---|
 |  |
| Quản lý bãi đỗ xe từ góc nhìn trên không sử dụng Ultralytics YOLO26 | Quản lý bãi đỗ xe từ góc nhìn trên cao sử dụng Ultralytics YOLO26 |
Quy trình làm việc của mã hệ thống quản lý bãi đỗ xe
Việc chọn điểm giờ đây trở nên dễ dàng
Việc chọn điểm đỗ xe là một nhiệm vụ quan trọng và phức tạp trong hệ thống quản lý bãi đỗ xe. Ultralytics đơn giản hóa quy trình này bằng cách cung cấp một công cụ "Parking slots annotator" cho phép bạn xác định các khu vực bãi đỗ xe, có thể được sử dụng sau này để xử lý thêm.
Bước 1: Chụp một khung hình từ video hoặc luồng camera mà bạn muốn quản lý bãi đậu xe.
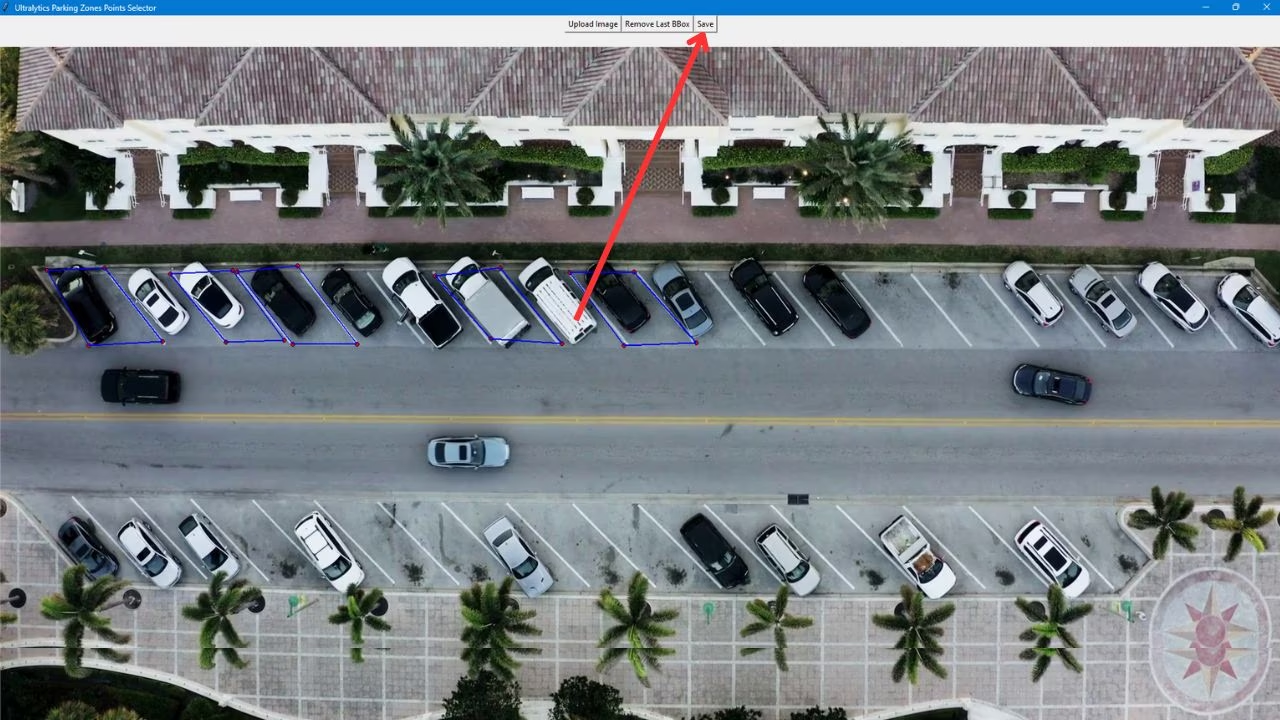
Bước 2: Sử dụng mã được cung cấp để khởi chạy giao diện đồ họa, nơi bạn có thể chọn một hình ảnh và bắt đầu phác thảo các khu vực đậu xe bằng cách nhấp chuột để tạo đa giác.
Công cụ chú thích vị trí đỗ xe Ultralytics YOLO
Bước bổ sung để cài đặt tkinter
Nói chung, tkinter được đóng gói sẵn với Python. Tuy nhiên, nếu nó chưa có, bạn có thể cài đặt nó bằng các bước được đánh dấu sau:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Kiến trúc:
sudo pacman -S tk - Windows: Cài đặt lại python và đánh dấu vào ô
tcl/tk and IDLEtrên Các tính năng tùy chọn trong quá trình cài đặt - MacOS: Cài đặt lại python từ https://www.python.org/downloads/macos/ hoặc
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Bước 3: Sau khi xác định các khu vực đỗ xe bằng đa giác, hãy nhấp vào save để lưu trữ một tệp JSON chứa dữ liệu trong thư mục làm việc của bạn.
Bước 4: Bây giờ bạn có thể sử dụng mã được cung cấp để quản lý bãi đậu xe với Ultralytics YOLO.
Quản lý bãi đỗ xe sử dụng Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Lưu ý
Trước tiên, hãy tạo chú thích khu vực đỗ xe bằng cách sử dụng ParkingPtsSelection() TRONG Python (Bước 2 ở trên), sau đó chuyển tệp JSON cho CLI yêu cầu.
ParkingManagement Các đối số
Đây là bảng với ParkingManagement các đối số:
| Đối số | Loại | Mặc định | Mô tả |
|---|---|---|---|
model | str | None | Đường dẫn đến tệp mô hình Ultralytics YOLO. |
json_file | str | None | Đường dẫn đến tệp JSON chứa tất cả dữ liệu tọa độ đỗ xe. |
Hàm ParkingManagement giải pháp cho phép sử dụng một số track tham số:
| Đối số | Loại | Mặc định | Mô tả |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Chỉ định thuật toán theo dõi để sử dụng, ví dụ: bytetrack.yaml hoặc botsort.yaml. |
conf | float | 0.1 | Đặt ngưỡng tin cậy cho các phát hiện; giá trị thấp hơn cho phép theo dõi nhiều đối tượng hơn nhưng có thể bao gồm các kết quả dương tính giả. |
iou | float | 0.7 | Đặt ngưỡng Intersection over Union (IoU) để lọc các detect chồng chéo. |
classes | list | None | Lọc kết quả theo chỉ số lớp. Ví dụ: classes=[0, 2, 3] chỉ theo dõi các lớp được chỉ định. |
verbose | bool | True | Kiểm soát việc hiển thị kết quả theo dõi, cung cấp đầu ra trực quan về các đối tượng được theo dõi. |
device | str | None | Chỉ định thiết bị cho suy luận (ví dụ: cpu, cuda:0 hoặc 0). Cho phép người dùng lựa chọn giữa CPU, một GPU cụ thể hoặc các thiết bị tính toán khác để thực thi mô hình. |
Hơn nữa, các tùy chọn trực quan hóa sau đây được hỗ trợ:
| Đối số | Loại | Mặc định | Mô tả |
|---|---|---|---|
show | bool | False | Nếu True, hiển thị hình ảnh hoặc video đã chú thích trong một cửa sổ. Hữu ích để có phản hồi trực quan ngay lập tức trong quá trình phát triển hoặc thử nghiệm. |
line_width | int or None | None | Chỉ định độ rộng đường của hộp giới hạn. Nếu None, độ rộng đường kẻ được tự động điều chỉnh dựa trên kích thước hình ảnh. Cung cấp tùy chỉnh trực quan để rõ ràng hơn. |
Câu hỏi thường gặp
Ultralytics YOLO26 cải thiện hệ thống quản lý bãi đỗ xe như thế nào?
Ultralytics YOLO26 cải thiện đáng kể hệ thống quản lý bãi đỗ xe bằng cách cung cấp tính năng phát hiện phương tiện theo thời gian thực và giám sát. Điều này giúp tối ưu hóa việc sử dụng các vị trí đỗ xe, giảm ùn tắc và cải thiện an toàn thông qua giám sát liên tục. Hệ thống Quản lý Bãi đỗ xe cho phép luồng giao thông hiệu quả, giảm thiểu thời gian chờ và lượng khí thải trong bãi đỗ xe, từ đó đóng góp vào sự bền vững môi trường. Để biết thêm chi tiết, hãy tham khảo quy trình làm việc của mã quản lý bãi đỗ xe.
Lợi ích của việc sử dụng Ultralytics YOLO26 cho bãi đỗ xe thông minh là gì?
Sử dụng Ultralytics YOLO26 cho đỗ xe thông minh mang lại nhiều lợi ích:
- Hiệu quả: Tối ưu hóa việc sử dụng không gian đỗ xe và giảm tắc nghẽn.
- An toàn và An ninh: Tăng cường giám sát và đảm bảo an toàn cho xe cộ và người đi bộ.
- Tác Động Môi Trường: Giúp giảm lượng khí thải bằng cách giảm thiểu thời gian xe dừng không tải. Tìm hiểu thêm các lợi ích trong phần Ưu điểm của Hệ thống Quản lý Bãi đỗ xe.
Làm thế nào để tôi xác định các vị trí đỗ xe bằng Ultralytics YOLO26?
Việc xác định các vị trí đỗ xe rất đơn giản với Ultralytics YOLO26:
- Chụp một khung hình từ video hoặc luồng camera.
- Sử dụng mã được cung cấp để khởi chạy GUI để chọn hình ảnh và vẽ đa giác để xác định các vị trí đỗ xe.
- Lưu dữ liệu đã gắn nhãn ở định dạng JSON để xử lý thêm. Để biết hướng dẫn đầy đủ, hãy xem phần chọn điểm ở trên.
Tôi có thể tùy chỉnh mô hình YOLO26 cho các nhu cầu quản lý bãi đỗ xe cụ thể không?
Vâng, Ultralytics YOLO26 cho phép tùy chỉnh để đáp ứng các nhu cầu quản lý bãi đỗ xe cụ thể. Bạn có thể điều chỉnh các tham số như màu của vùng bị chiếm và vùng khả dụng, lề cho hiển thị văn bản và nhiều hơn nữa. Sử dụng ParkingManagement của lớp các đối số, bạn có thể điều chỉnh mô hình để phù hợp với các yêu cầu cụ thể của mình, đảm bảo hiệu quả và tính hiệu quả tối đa.
Một số ứng dụng thực tế của Ultralytics YOLO26 trong quản lý bãi đỗ xe là gì?
Ultralytics YOLO26 được ứng dụng trong nhiều tình huống thực tế khác nhau để quản lý bãi đỗ xe, bao gồm:
- Phát hiện chỗ đỗ xe: Xác định chính xác các chỗ trống và đang có xe.
- Giám sát: Nâng cao bảo mật thông qua giám sát thời gian thực.
- Quản lý luồng giao thông: Giảm thời gian chờ và tắc nghẽn với việc xử lý lưu lượng hiệu quả. Hình ảnh giới thiệu các ứng dụng này có thể được tìm thấy trong các ứng dụng thực tế.






