高级 数据可视化:使用 Ultralytics YOLO26 的热力图 🚀
热图简介
![]()
使用 Ultralytics YOLO26 生成的热力图将复杂数据转换为生动、颜色编码的矩阵。这种可视化工具采用一系列颜色来表示不同的数据值,其中较暖的色调表示更高的强度,而较冷的色调表示较低的值。热力图擅长可视化复杂的数据模式、相关性和异常,为跨不同领域的数据解释提供了一种易于访问且引人入胜的方法。
观看: 使用 Ultralytics YOLO26 的热力图
为什么选择热图进行数据分析?
- 直观的数据分布可视化: 热图简化了对数据集中和分布的理解,将复杂的数据集转换为易于理解的可视化格式。
- 高效的模式检测: 通过以热图格式可视化数据,可以更容易地发现趋势、集群和异常值,从而促进更快的分析和见解。
- 增强的空间分析和决策能力: 热图有助于展示空间关系,从而辅助商业智能、环境研究和城市规划等领域的决策过程。
实际应用
| 运输 | 零售业 |
|---|---|
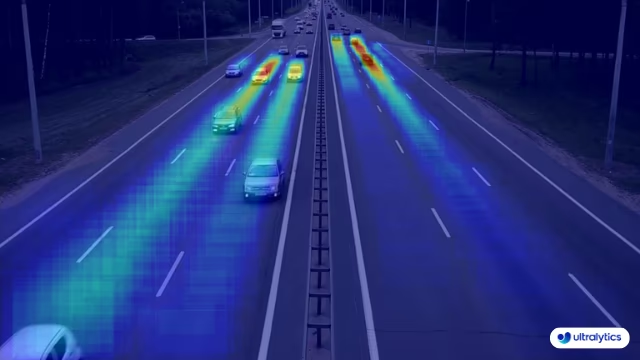 |  |
| Ultralytics YOLO26 交通热力图 | Ultralytics YOLO26 零售热力图 |
使用 Ultralytics YOLO 的热图
# Run a heatmap example
yolo solutions heatmap show=True
# Pass a source video
yolo solutions heatmap source="path/to/video.mp4"
# Pass a custom colormap
yolo solutions heatmap colormap=cv2.COLORMAP_INFERNO
# Heatmaps + object counting
yolo solutions heatmap region="[(20, 400), (1080, 400), (1080, 360), (20, 360)]"
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("heatmap_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# For object counting with heatmap, you can pass region points.
# region_points = [(20, 400), (1080, 400)] # line points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # rectangle region
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # polygon points
# Initialize heatmap object
heatmap = solutions.Heatmap(
show=True, # display the output
model="yolo26n.pt", # path to the YOLO26 model file
colormap=cv2.COLORMAP_PARULA, # colormap of heatmap
# region=region_points, # object counting with heatmaps, you can pass region_points
# classes=[0, 2], # generate heatmap for specific classes, e.g., person and car.
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = heatmap(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
Heatmap() 参数
这是一个包含以下内容的表格 Heatmap 参数:
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
model | str | None | Ultralytics YOLO 模型文件的路径。 |
colormap | int | cv2.COLORMAP_DEEPGREEN | 用于热图的颜色映射。 |
show_in | bool | True | 控制是否在视频流上显示进入计数的标志。 |
show_out | bool | True | 控制是否在视频流上显示离开计数的标志。 |
region | list | '[(20, 400), (1260, 400)]' | 定义计数区域的点列表。 |
您还可以应用不同的 track 中的参数 Heatmap 解决方案。
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
tracker | str | 'botsort.yaml' | 指定要使用的跟踪算法,例如: bytetrack.yaml 或 botsort.yaml. |
conf | float | 0.1 | 设置检测的置信度阈值;较低的值允许跟踪更多对象,但可能包含误报。 |
iou | float | 0.7 | 设置交并比 (IoU) 阈值,用于过滤重叠的检测结果。 |
classes | list | None | 按类别索引过滤结果。例如, classes=[0, 2, 3] 仅跟踪指定的类别。 |
verbose | bool | True | 控制跟踪结果的显示,提供被跟踪对象的可视化输出。 |
device | str | None | 指定用于推理的设备(例如, cpu, cuda:0 或 0)。允许用户在 CPU、特定 GPU 或其他计算设备之间进行选择,以执行模型。 |
此外,下面列出了支持的可视化参数:
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
show | bool | False | 可视化参数: True,则在窗口中显示带注释的图像或视频。这对于开发或测试期间的即时视觉反馈非常有用。 |
line_width | int or None | None | 指定边界框的线条宽度。 如果 None,则线条宽度会根据图像大小自动调整。 提供视觉自定义以提高清晰度。 |
show_conf | bool | True | 在标签旁边显示每个检测的置信度分数。 可以深入了解模型对每次检测的确定性。 |
show_labels | bool | True | 在可视化输出中显示每个检测的标签。 能够立即理解检测到的对象。 |
热图 COLORMAPs
| 颜色映射名称 | 描述 |
|---|---|
cv::COLORMAP_AUTUMN | Autumn 颜色映射 |
cv::COLORMAP_BONE | Bone 颜色映射 |
cv::COLORMAP_JET | Jet 颜色映射 |
cv::COLORMAP_WINTER | Winter 颜色映射 |
cv::COLORMAP_RAINBOW | Rainbow 颜色映射 |
cv::COLORMAP_OCEAN | Ocean 颜色映射 |
cv::COLORMAP_SUMMER | Summer 颜色映射 |
cv::COLORMAP_SPRING | Spring 颜色映射 |
cv::COLORMAP_COOL | Cool 颜色映射 |
cv::COLORMAP_HSV | HSV(色调、饱和度、明度)颜色映射 |
cv::COLORMAP_PINK | Pink 颜色映射 |
cv::COLORMAP_HOT | Hot 颜色映射 |
cv::COLORMAP_PARULA | Parula 颜色映射 |
cv::COLORMAP_MAGMA | Magma 颜色映射 |
cv::COLORMAP_INFERNO | Inferno 颜色映射 |
cv::COLORMAP_PLASMA | Plasma 颜色映射 |
cv::COLORMAP_VIRIDIS | Viridis 色彩图 |
cv::COLORMAP_CIVIDIS | Cividis 色彩图 |
cv::COLORMAP_TWILIGHT | Twilight 色彩图 |
cv::COLORMAP_TWILIGHT_SHIFTED | Shifted Twilight 色彩图 |
cv::COLORMAP_TURBO | Turbo 色彩图 |
cv::COLORMAP_DEEPGREEN | Deep Green 色彩图 |
这些色彩图通常用于以不同的颜色表示形式可视化数据。
Ultralytics YOLO26 中的热力图工作原理
Ultralytics YOLO26 中的 热力图解决方案 扩展了 ObjectCounter 类,用于生成和可视化视频流中的移动模式。初始化时,该解决方案会创建一个空白热力图层,该图层会随着目标在帧中移动而更新。
对于每个检测到的对象,解决方案是:
- 使用 YOLO26 的 track 功能跨帧 track 目标
- 更新对象位置的热图强度
- 应用选定的颜色映射来可视化强度值
- 将彩色热图叠加在原始帧上
结果是一个随时间构建的动态可视化,揭示了视频数据中的交通模式、人群移动或其他空间行为。
常见问题
Ultralytics YOLO26 如何生成热力图及其优点是什么?
Ultralytics YOLO26 通过将复杂数据转换为颜色编码矩阵来生成热力图,其中不同的色调代表数据强度。热力图使数据中的模式、相关性和异常更易于可视化。较暖的色调表示较高的值,而较冷的色调表示较低的值。主要优点包括直观的数据分布可视化、高效的模式 detect 和增强的空间分析以辅助决策。有关更多详细信息和配置选项,请参阅 热力图配置 部分。
我可以使用 Ultralytics YOLO26 同时执行目标 track 和生成热力图吗?
是的,Ultralytics YOLO26 支持同时进行目标 track 和热力图生成。这可以通过其 Heatmap 与目标跟踪模型集成的解决方案。为此,您需要初始化热力图对象并利用 YOLO26 的跟踪功能。以下是一个简单示例:
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(colormap=cv2.COLORMAP_PARULA, show=True, model="yolo26n.pt")
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
如需更多指导,请查看跟踪模式页面。
Ultralytics YOLO26 热力图与 OpenCV 或 Matplotlib 等其他数据可视化工具有何不同?
Ultralytics YOLO26 热力图专为与其目标检测和跟踪模型集成而设计,为实时数据分析提供端到端解决方案。与 OpenCV 或 Matplotlib 等通用可视化工具不同,YOLO26 热力图针对性能和自动化处理进行了优化,支持持久跟踪、衰减因子调整和实时视频叠加等功能。有关 YOLO26 独特功能的更多信息,请访问Ultralytics YOLO26 简介。
如何使用 Ultralytics YOLO26 在热力图中仅可视化特定目标类别?
您可以通过在 YOLO 模型的 track() 方法中指定所需的类来可视化特定的对象类别。例如,如果您只想可视化汽车和人(假设它们的类索引为 0 和 2),您可以设置 classes 参数。
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(show=True, model="yolo26n.pt", classes=[0, 2])
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()
企业为何应选择 Ultralytics YOLO26 进行数据分析中的热力图生成?
Ultralytics YOLO26 提供了先进目标检测与实时热力图生成的无缝集成,使其成为寻求更有效数据可视化的企业的理想选择。其主要优势包括直观的数据分布可视化、高效的模式检测以及增强的空间分析,从而实现更好的决策。此外,YOLO26 的尖端功能,如持久跟踪、可定制的颜色映射和对各种导出格式的支持,使其在综合数据分析方面优于 TensorFlow 和 OpenCV 等其他工具。如需了解更多商业应用,请访问Ultralytics 计划。







