使用 Ultralytics YOLO26 进行停车管理 🚀
什么是停车管理系统?
通过 Ultralytics YOLO26 进行停车场管理,通过组织车位和监控可用性,确保高效安全的停车。YOLO26 可以通过实时车辆 detect 和对停车占用情况的洞察来改善停车场管理。
观看: 如何使用Ultralytics 构建停车管理系统 | 实时车位检测 🚗
停车管理系统的优势
- 效率: 停车场管理优化了停车位的使用并减少了拥堵。
- 安全保障:使用 YOLO26 进行停车场管理,通过监控和安全措施提升人员和车辆的安全。
- 减少排放:使用 YOLO26 进行停车场管理,通过管理交通流量,最大程度地减少停车场内的空闲时间和排放。
实际应用
| 停车场管理系统 | 停车场管理系统 |
|---|---|
 |  |
| 使用 Ultralytics YOLO26 的停车场管理航拍视图 | 使用 Ultralytics YOLO26 的停车场管理俯视图 |
停车场管理系统代码工作流程
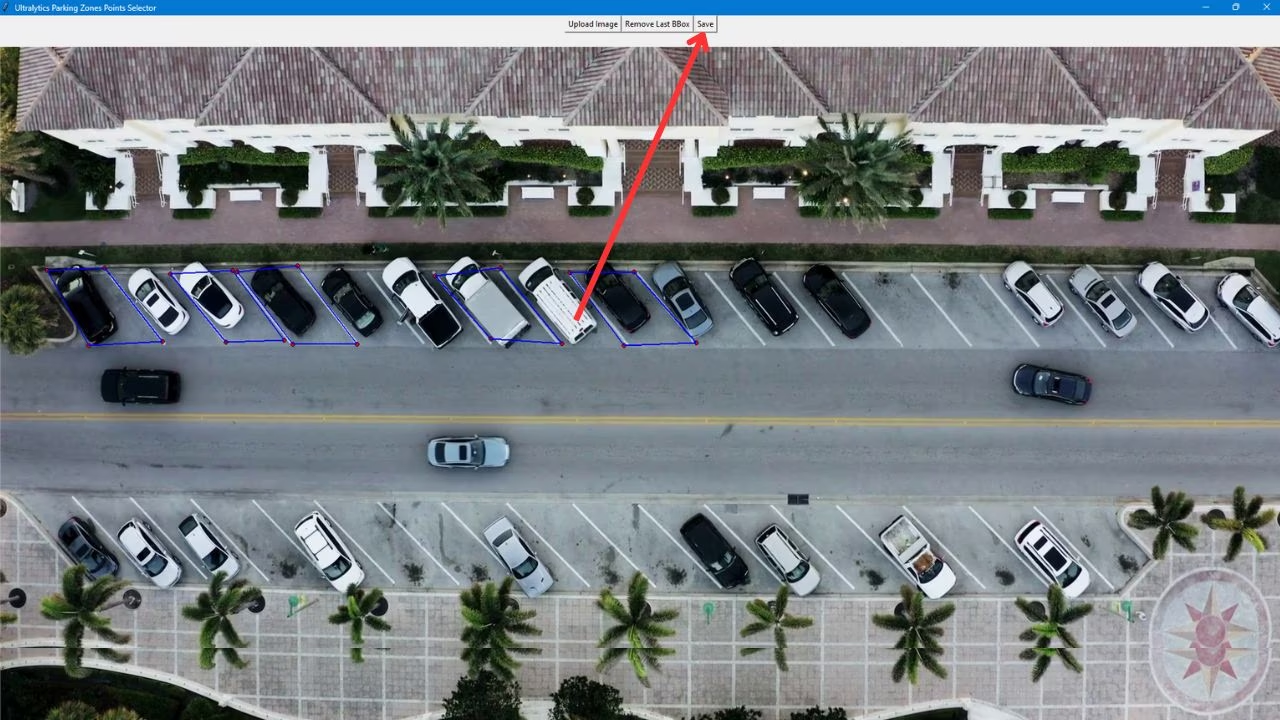
点选择现在很容易
在停车管理系统中,选择停车点是一项至关重要且复杂的任务。Ultralytics通过提供一个工具“停车位注释器”来简化此过程,该工具允许您定义停车场区域,这些区域稍后可用于其他处理。
步骤 1: 从您要管理的停车场的视频或摄像头流中捕获一帧。
步骤 2: 使用提供的代码启动图形界面,您可以在其中选择图像并通过鼠标单击开始勾勒停车区域轮廓以创建多边形。
停车位标注器 Ultralytics YOLO
安装的附加步骤 tkinter
一般来说, tkinter 已预先打包 python。但是,如果未打包,您可以使用以下突出显示的步骤安装它:
- Linux:(Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - 架构:
sudo pacman -S tk - Windows: 重新安装 python 并启用复选框
tcl/tk and IDLE在 可选功能 安装期间 - MacOS: 从以下位置重新安装 python https://www.python.org/downloads/macos/ 或
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
第三步: 使用多边形定义停车区域后,单击 save 将包含数据在内的 JSON 文件存储到您的工作目录中。
步骤 4: 现在,您可以利用提供的代码,通过 Ultralytics YOLO 进行停车管理。
使用 Ultralytics YOLO 进行停车管理
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
注意
首先使用以下命令创建停车区标注: ParkingPtsSelection() 在Python 中Python 参见上文第 2 步),然后将 JSON 文件传递给CLI 。
ParkingManagement 参数
这是一个包含以下内容的表格 ParkingManagement 参数:
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
model | str | None | Ultralytics YOLO 模型文件的路径。 |
json_file | str | None | 包含所有停车坐标数据的 JSON 文件路径。 |
字段 ParkingManagement 解决方案允许使用多个 track 参数:
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
tracker | str | 'botsort.yaml' | 指定要使用的跟踪算法,例如: bytetrack.yaml 或 botsort.yaml. |
conf | float | 0.1 | 设置检测的置信度阈值;较低的值允许跟踪更多对象,但可能包含误报。 |
iou | float | 0.7 | 设置交并比 (IoU) 阈值,用于过滤重叠的检测结果。 |
classes | list | None | 按类别索引过滤结果。例如, classes=[0, 2, 3] 仅跟踪指定的类别。 |
verbose | bool | True | 控制跟踪结果的显示,提供被跟踪对象的可视化输出。 |
device | str | None | 指定用于推理的设备(例如, cpu, cuda:0 或 0)。允许用户在 CPU、特定 GPU 或其他计算设备之间进行选择,以执行模型。 |
此外,支持以下可视化选项:
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
show | bool | False | 可视化参数: True,则在窗口中显示带注释的图像或视频。这对于开发或测试期间的即时视觉反馈非常有用。 |
line_width | int or None | None | 指定边界框的线条宽度。 如果 None,则线条宽度会根据图像大小自动调整。 提供视觉自定义以提高清晰度。 |
常见问题
Ultralytics YOLO26 如何提升停车场管理系统?
Ultralytics YOLO26 通过提供 实时车辆 detect 和监控,极大地增强了停车场管理系统。这带来了停车位的优化利用、减少拥堵,并通过持续监控提高安全性。停车场管理系统 实现了高效的交通流,最大程度地减少了停车场内的空闲时间和排放,从而有助于环境可持续性。有关更多详细信息,请参阅停车场管理代码工作流程。
使用 Ultralytics YOLO26 进行智能停车有哪些优势?
使用 Ultralytics YOLO26 进行智能停车可带来诸多益处:
- 效率: 优化停车位的使用并减少拥堵。
- 安全保障:增强监控,确保车辆和行人的安全。
- 环境影响:通过最大限度地减少车辆怠速时间来帮助减少排放。 在停车管理系统的优势部分中探索更多好处。
如何使用 Ultralytics YOLO26 定义停车位?
使用 Ultralytics YOLO26 定义停车位简单明了:
- 从视频或摄像头流中捕获帧。
- 使用提供的代码启动一个 GUI,用于选择图像并绘制多边形以定义停车位。
- 以 JSON 格式保存标记数据,以供进一步处理。有关全面的说明,请查看上面的“选择点”部分。
是否可以为特定的停车场管理需求定制 YOLO26 模型?
是的,Ultralytics YOLO26 允许针对特定的停车场管理需求进行定制。您可以调整诸如 已占用和可用区域颜色,文本显示边距等等。利用 ParkingManagement 类的 参数,您可以定制模型以满足您的特定需求,从而确保最高的效率和效能。
Ultralytics YOLO26 在停车场管理中有哪些实际应用?
Ultralytics YOLO26 被应用于各种实际的停车场管理场景,包括:
- 停车位检测: 准确识别可用和已占用的车位。
- 监控: 通过实时监控增强安全性。
- 交通流量管理: 通过高效的交通处理减少空闲时间和拥堵。展示这些应用的图片可以在实际应用中找到。






