Datenerweiterung mit Ultralytics YOLO
Einführung
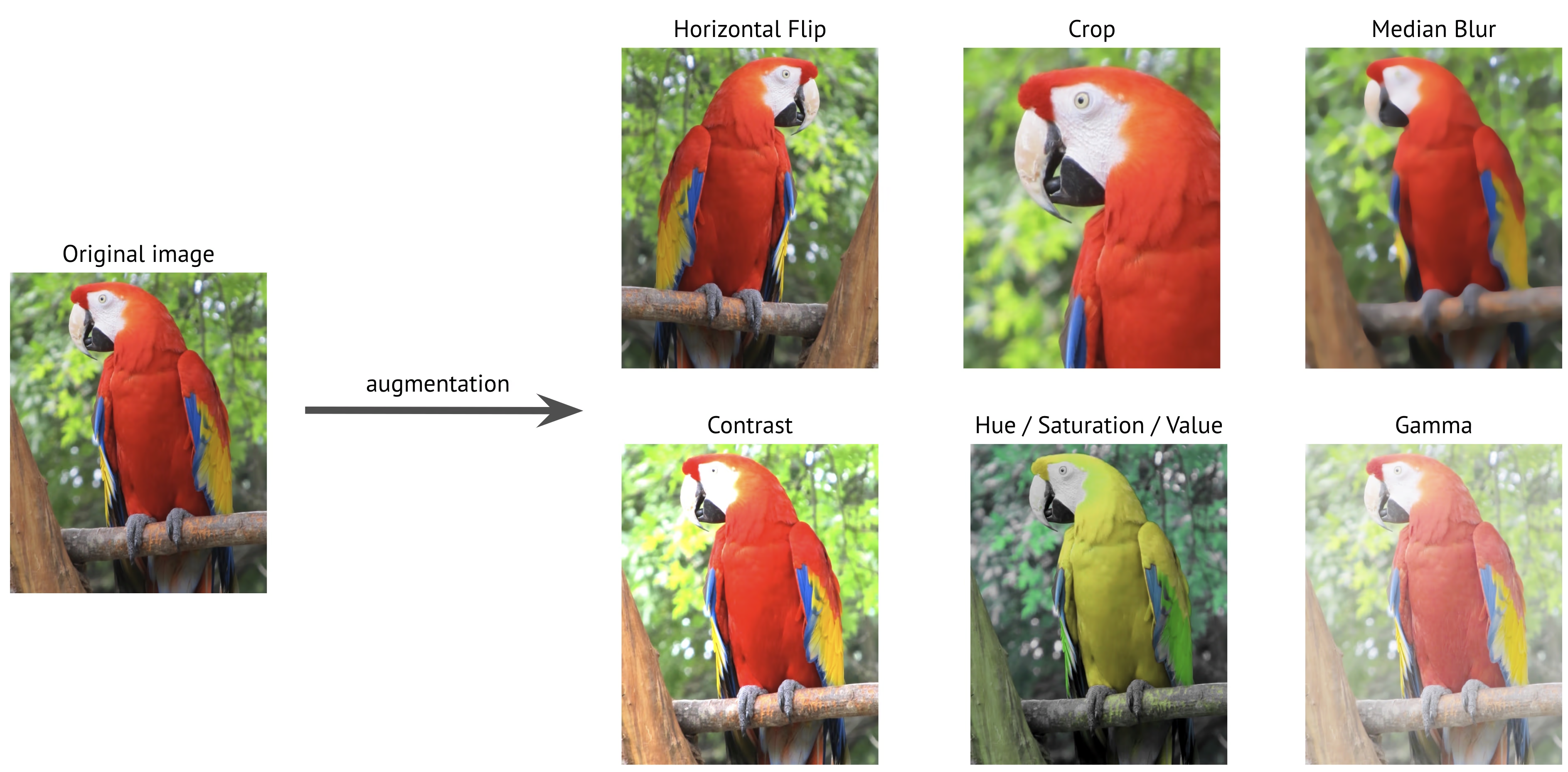
Datenerweiterung ist eine entscheidende Technik in der Computer Vision, die Ihren Trainingsdatensatz künstlich erweitert, indem sie verschiedene Transformationen auf bestehende Bilder anwendet. Beim Training von Deep-Learning-Modellen wie Ultralytics YOLO hilft die Datenerweiterung, die Robustheit des Modells zu verbessern, Overfitting zu reduzieren und die Generalisierung auf reale Szenarien zu verbessern.
Ansehen: Wie man Mosaic, MixUp & weitere Datenaugmentationen verwendet, um Ultralytics YOLO-Modellen zu helfen, besser zu generalisieren 🚀
Warum Datenaugmentation wichtig ist
Die Datenerweiterung dient mehreren wichtigen Zwecken beim Training von Computer-Vision-Modellen:
- Erweiterter Datensatz: Durch das Erstellen von Variationen bestehender Bilder können Sie die Größe Ihres Trainingsdatensatzes effektiv erhöhen, ohne neue Daten zu sammeln.
- Verbesserte Generalisierung: Modelle lernen, Objekte unter verschiedenen Bedingungen zu erkennen, wodurch sie in realen Anwendungen robuster werden.
- Reduziertes Overfitting: Durch die Einführung von Variabilität in den Trainingsdaten ist es weniger wahrscheinlich, dass Modelle bestimmte Bildeigenschaften auswendig lernen.
- Verbesserte Leistung: Modelle, die mit geeigneter Augmentierung trainiert wurden, erzielen in der Regel eine bessere Genauigkeit bei Validierungs- und Testdatensätzen.
Die Implementierung von Ultralytics YOLO bietet eine umfassende Suite von Augmentationstechniken, von denen jede spezifischen Zwecken dient und auf unterschiedliche Weise zur Modellleistung beiträgt. Dieser Leitfaden wird jeden Augmentationsparameter im Detail untersuchen und Ihnen helfen zu verstehen, wann und wie Sie diese effektiv in Ihren Projekten einsetzen können.
Beispielkonfigurationen
Sie können jeden Parameter mithilfe der Python-API, der Befehlszeilenschnittstelle (CLI) oder einer Konfigurationsdatei anpassen. Nachfolgend finden Sie Beispiele für die Einrichtung der Datenerweiterung in jeder Methode.
Konfigurationsbeispiele
import albumentations as A
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n.pt")
# Training with custom augmentation parameters
model.train(data="coco.yaml", epochs=100, hsv_h=0.03, hsv_s=0.6, hsv_v=0.5)
# Training without any augmentations (disabled values omitted for clarity)
model.train(
data="coco.yaml",
epochs=100,
hsv_h=0.0,
hsv_s=0.0,
hsv_v=0.0,
translate=0.0,
scale=0.0,
fliplr=0.0,
mosaic=0.0,
erasing=0.0,
auto_augment=None,
)
# Training with custom Albumentations transforms (Python API only)
custom_transforms = [
A.Blur(blur_limit=7, p=0.5),
A.CLAHE(clip_limit=4.0, p=0.5),
]
model.train(data="coco.yaml", epochs=100, augmentations=custom_transforms)
# Training with custom augmentation parameters
yolo detect train data=coco8.yaml model=yolo26n.pt epochs=100 hsv_h=0.03 hsv_s=0.6 hsv_v=0.5
Verwendung einer Konfigurationsdatei
Sie können alle Trainingsparameter, einschließlich Augmentierungen, in einer YAML-Konfigurationsdatei definieren (z. B. train_custom.yaml). Das Argument mode Parameter ist nur erforderlich, wenn die CLI verwendet wird. Diese neue YAML-Datei überschreibt dann die Standardeinstellung befindet sich im ultralytics Package.
# train_custom.yaml
# 'mode' is required only for CLI usage
mode: train
data: coco8.yaml
model: yolo26n.pt
epochs: 100
hsv_h: 0.03
hsv_s: 0.6
hsv_v: 0.5
Starten Sie dann das Training mit der Python-API:
Trainingsbeispiel
from ultralytics import YOLO
# Load a COCO-pretrained YOLO26n model
model = YOLO("yolo26n.pt")
# Train the model with custom configuration
model.train(cfg="train_custom.yaml")
# Train the model with custom configuration
yolo detect train model="yolo26n.pt" cfg=train_custom.yaml
Farbraum-Augmentierungen
Farbtonanpassung (hsv_h)
- Bereich:
0.0-1.0 - Standard:
0.015 - Nutzung: Verschiebt Bildfarben unter Beibehaltung ihrer Beziehungen. Die
hsv_hDer Hyperparameter definiert die Verschiebungsstärke, wobei die endgültige Anpassung zufällig zwischen den Werten gewählt wird-hsv_hundhsv_h. Zum Beispiel mithsv_h=0.3, wird die Verschiebung zufällig innerhalb von ausgewählt-0.3zu0.3. Für Werte über0.5, die Farbtonverschiebung wickelt sich um das Farbrad, deshalb sehen die Augmentierungen gleich aus zwischen0.5und-0.5. - Zweck: Besonders nützlich für Außenszenarien, in denen die Lichtverhältnisse das Erscheinungsbild von Objekten dramatisch beeinflussen können. Beispielsweise kann eine Banane unter hellem Sonnenlicht gelber, aber in Innenräumen grünlicher aussehen.
- Ultralytics' Implementierung: RandomHSV
-0.5 | -0.25 | 0.0 | 0.25 | 0.5 |
|---|---|---|---|---|
 |  |  |  |  |
Sättigungsanpassung (hsv_s)
- Bereich:
0.0-1.0 - Standard:
0.7 - Nutzung: Modifiziert die Intensität der Farben im Bild. Die
hsv_sDer Hyperparameter definiert die Verschiebungsstärke, wobei die endgültige Anpassung zufällig zwischen den Werten gewählt wird-hsv_sundhsv_s. Zum Beispiel mithsv_s=0.7, wird die Intensität zufällig innerhalb von ausgewählt-0.7zu0.7. - Zweck: Hilft Modellen, mit unterschiedlichen Wetterbedingungen und Kameraeinstellungen umzugehen. Beispielsweise kann ein rotes Verkehrsschild an einem sonnigen Tag sehr lebendig erscheinen, aber bei nebligen Bedingungen stumpf und verblasst aussehen.
- Ultralytics' Implementierung: RandomHSV
-1.0 | -0.5 | 0.0 | 0.5 | 1.0 |
|---|---|---|---|---|
 |  | |  |  |
Helligkeitsanpassung (hsv_v)
- Bereich:
0.0-1.0 - Standard:
0.4 - Nutzung: Ändert die Helligkeit des Bildes. Die
hsv_vDer Hyperparameter definiert die Verschiebungsstärke, wobei die endgültige Anpassung zufällig zwischen den Werten gewählt wird-hsv_vundhsv_v. Zum Beispiel mithsv_v=0.4, wird die Intensität zufällig innerhalb von ausgewählt-0.4zu0.4. - Zweck: Essentiell für das Training von Modellen, die unter verschiedenen Lichtbedingungen funktionieren müssen. Beispielsweise kann ein roter Apfel im Sonnenlicht hell aussehen, im Schatten jedoch viel dunkler.
- Ultralytics' Implementierung: RandomHSV
-1.0 | -0.5 | 0.0 | 0.5 | 1.0 |
|---|---|---|---|---|
 |  | |  |  |
Geometrische Transformationen
Rotation (degrees)
- Bereich:
0.0zu180 - Standard:
0.0 - Nutzung: Rotiert Bilder zufällig innerhalb des angegebenen Bereichs. Die
degreesDer Hyperparameter definiert den Drehwinkel, wobei die endgültige Anpassung zufällig zwischen den Werten gewählt wird-degreesunddegrees. Zum Beispiel mitdegrees=10.0, wird die Drehung zufällig innerhalb von ausgewählt-10.0zu10.0. - Zweck: Entscheidend für Anwendungen, bei denen Objekte in verschiedenen Ausrichtungen erscheinen können. In Luftaufnahmen von Drohnen beispielsweise können Fahrzeuge in jede Richtung ausgerichtet sein, sodass Modelle Objekte unabhängig von ihrer Drehung erkennen müssen.
- Ultralytics' Implementierung: RandomPerspective
-180 | -90 | 0.0 | 90 | 180 |
|---|---|---|---|---|
 |  | |  |  |
Übersetzung (translate)
- Bereich:
0.0-1.0 - Standard:
0.1 - Nutzung: Verschiebt Bilder horizontal und vertikal um einen zufälligen Bruchteil der Bildgröße. Die
translateDer Hyperparameter definiert die Verschiebungsstärke, wobei die endgültige Anpassung zweimal (einmal für jede Achse) innerhalb des Bereichs zufällig gewählt wird-translateundtranslate. Zum Beispiel mittranslate=0.5, wird die Translation zufällig innerhalb von ausgewählt-0.5zu0.5auf der x-Achse und ein anderer unabhängiger Zufallswert wird innerhalb desselben Bereichs auf der y-Achse ausgewählt. - Zweck: Hilft Modellen, teilweise sichtbare Objekte zu detect und verbessert die Robustheit gegenüber der Objektposition. Zum Beispiel können in Anwendungen zur Fahrzeugschadensbewertung Autoteile je nach Position und Entfernung des Fotografen vollständig oder teilweise im Bild erscheinen; die Translations-Augmentierung wird dem Modell beibringen, diese Merkmale unabhängig von ihrer Vollständigkeit oder Position zu erkennen.
- Ultralytics' Implementierung: RandomPerspective
- Hinweis: Der Einfachheit halber sind die unten angewendeten Übersetzungen jedes Mal für beide gleich
xundyAchsen. Werte-1.0und1.0werden nicht angezeigt, da sie das Bild vollständig aus dem Rahmen verschieben würden.
-0.5 | -0.25 | 0.0 | 0.25 | 0.5 |
|---|---|---|---|---|
 |  | |  |  |
Skalierung (scale)
- Bereich:
0.0-1.0 - Standard:
0.5 - Nutzung: Ändert die Größe von Bildern um einen zufälligen Faktor innerhalb des angegebenen Bereichs. Die
scaleDer Hyperparameter definiert den Skalierungsfaktor, wobei die endgültige Anpassung zufällig zwischen den Werten gewählt wird1-scaleund1+scale. Zum Beispiel mitscale=0.5, wird die Skalierung zufällig innerhalb von ausgewählt0.5zu1.5. - Zweck: Ermöglicht es Modellen, mit Objekten in unterschiedlichen Entfernungen und Größen umzugehen. In autonomen Fahranwendungen beispielsweise können Fahrzeuge in verschiedenen Entfernungen von der Kamera erscheinen, sodass das Modell sie unabhängig von ihrer Größe erkennen muss.
- Ultralytics' Implementierung: RandomPerspective
- Hinweis:
- Der Wert
-1.0wird nicht angezeigt, da es das Bild verschwinden lassen würde, während1.0führt einfach zu einem 2-fachen Zoom. - Die in der folgenden Tabelle angezeigten Werte sind diejenigen, die durch den Hyperparameter angewendet werden
scale, nicht der endgültige Skalierungsfaktor. - Wenn
scaleist größer als1.0, kann das Bild entweder sehr klein oder gespiegelt sein, da der Skalierungsfaktor zufällig gewählt wird zwischen1-scaleund1+scale. Zum Beispiel mitscale=3.0, wird die Skalierung zufällig innerhalb von ausgewählt-2.0zu4.0Wenn ein negativer Wert gewählt wird, wird das Bild gespiegelt.
- Der Wert
-0.5 | -0.25 | 0.0 | 0.25 | 0.5 |
|---|---|---|---|---|
 |  | |  |  |
Scherung (shear)
- Bereich:
-180zu+180 - Standard:
0.0 - Nutzung: Führt eine geometrische Transformation ein, die das Bild sowohl entlang der x-Achse als auch der y-Achse verzerrt, wodurch Teile des Bildes effektiv in eine Richtung verschoben werden, während parallele Linien beibehalten werden. Die
shearDer Hyperparameter definiert den Scherwinkel, wobei die endgültige Anpassung zufällig zwischen den Werten gewählt wird-shearundshear. Zum Beispiel mitshear=10.0, wird die Scherung zufällig innerhalb von ausgewählt-10zu10auf der x-Achse und ein anderer unabhängiger Zufallswert wird innerhalb desselben Bereichs auf der y-Achse ausgewählt. - Zweck: Hilft Modellen, sich an Variationen der Betrachtungswinkel anzupassen, die durch leichte Neigungen oder schräge Blickwinkel verursacht werden. Beispielsweise können bei der Verkehrsüberwachung Objekte wie Autos und Verkehrsschilder aufgrund nicht-senkrechter Kamerapositionen schräg erscheinen. Das Anwenden von Scherungsvergrößerung stellt sicher, dass das Modell Objekte trotz solcher verzerrten Verzerrungen erkennt.
- Ultralytics' Implementierung: RandomPerspective
- Hinweis:
shearWerte können das Bild schnell verzerren, daher wird empfohlen, mit kleinen Werten zu beginnen und diese schrittweise zu erhöhen.- Anders als bei perspektivischen Transformationen führt die Scherung nicht zu Tiefe oder Fluchtpunkten, sondern verzerrt die Form von Objekten, indem sie ihre Winkel verändert, während gegenüberliegende Seiten parallel bleiben.
-10 | -5 | 0.0 | 5 | 10 |
|---|---|---|---|---|
 |  | |  |  |
Perspektive (perspective)
- Bereich:
0.0-0.001 - Standard:
0.0 - Nutzung: Wendet eine vollständige perspektivische Transformation entlang der x- und y-Achse an, wodurch simuliert wird, wie Objekte aus verschiedenen Tiefen oder Winkeln betrachtet erscheinen. Die
perspectiveDer Hyperparameter definiert die Perspektivenstärke, wobei die endgültige Anpassung zufällig zwischen den Werten gewählt wird-perspectiveundperspective. Zum Beispiel mitperspective=0.001, wird die Perspektive zufällig innerhalb von ausgewählt-0.001zu0.001auf der x-Achse und ein anderer unabhängiger Zufallswert wird innerhalb desselben Bereichs auf der y-Achse ausgewählt. - Zweck: Perspektivische Augmentierung ist entscheidend für den Umgang mit extremen Änderungen des Blickwinkels, insbesondere in Szenarien, in denen Objekte aufgrund von perspektivischen Verschiebungen verkürzt oder verzerrt erscheinen. Beispielsweise können bei der drohnenbasierten Objekterkennung Gebäude, Straßen und Fahrzeuge je nach Neigung und Höhe der Drohne gestreckt oder komprimiert erscheinen. Durch das Anwenden von perspektivischen Transformationen lernen Modelle, Objekte trotz dieser perspektivisch bedingten Verzerrungen zu erkennen, wodurch ihre Robustheit in realen Einsätzen verbessert wird.
- Ultralytics' Implementierung: RandomPerspective
-0.001 | -0.0005 | 0.0 | 0.0005 | 0.001 |
|---|---|---|---|---|
 |  | |  |  |
Auf-Ab-Drehung (flipud)
- Bereich:
0.0-1.0 - Standard:
0.0 - Nutzung: Führt einen vertikalen Flip durch, indem das Bild entlang der y-Achse invertiert wird. Diese Transformation spiegelt das gesamte Bild auf den Kopf, behält aber alle räumlichen Beziehungen zwischen Objekten bei. Der Hyperparameter flipud definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, mit einem Wert von
flipud=1.0Sicherstellen, dass alle Bilder gespiegelt werden und ein Wert vonflipud=0.0deaktiviert die Transformation vollständig. Zum Beispiel mitflipud=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, auf den Kopf gestellt zu werden. - Zweck: Nützlich für Szenarien, in denen Objekte auf dem Kopf stehen können. Beispielsweise können in Robotervisionssystemen Objekte auf Förderbändern oder Roboterarmen aufgenommen und in verschiedenen Ausrichtungen platziert werden. Vertikales Spiegeln hilft dem Modell, Objekte unabhängig von ihrer Top-Down-Positionierung zu erkennen.
- Ultralytics' Implementierung: RandomFlip
flipud aus | flipud an |
|---|---|
|  |
Links-Rechts-Drehung (fliplr)
- Bereich:
0.0-1.0 - Standard:
0.5 - Nutzung: Führt einen horizontalen Flip durch, indem das Bild entlang der x-Achse gespiegelt wird. Diese Transformation vertauscht die linke und rechte Seite unter Beibehaltung der räumlichen Konsistenz, was dem Modell hilft, sich auf Objekte zu verallgemeinern, die in gespiegelten Ausrichtungen erscheinen. Die
fliplrDer Hyperparameter definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, mit einem Wert vonfliplr=1.0Sicherstellen, dass alle Bilder gespiegelt werden und ein Wert vonfliplr=0.0deaktiviert die Transformation vollständig. Zum Beispiel mitfliplr=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, von links nach rechts gespiegelt zu werden. - Zweck: Horizontales Spiegeln wird häufig in der Objekterkennung, der Posenschätzung und der Gesichtserkennung verwendet, um die Robustheit gegenüber Links-Rechts-Variationen zu verbessern. Beispielsweise können im autonomen Fahren Fahrzeuge und Fußgänger auf beiden Seiten der Straße erscheinen, und horizontales Spiegeln hilft dem Modell, sie in beiden Ausrichtungen gleichermaßen gut zu erkennen.
- Ultralytics' Implementierung: RandomFlip
fliplr aus | fliplr an |
|---|---|
|  |
BGR-Kanal-Swap (bgr)
- Bereich:
0.0-1.0 - Standard:
0.0 - Nutzung: Vertauscht die Farbkanäle eines Bildes von RGB zu BGR und ändert die Reihenfolge, in der Farben dargestellt werden. Die
bgrDer Hyperparameter definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, mitbgr=1.0Sicherstellen, dass alle Bilder den Kanalwechsel durchlaufen undbgr=0.0deaktiviert sie. Zum Beispiel mitbgr=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, von RGB in BGR konvertiert zu werden. - Zweck: Erhöht die Robustheit gegenüber unterschiedlichen Farbkanalreihenfolgen. Beispielsweise beim Trainieren von Modellen, die über verschiedene Kamerasysteme und Bildverarbeitungsbibliotheken hinweg arbeiten müssen, bei denen die Formate RGB und BGR inkonsistent verwendet werden können, oder beim Bereitstellen von Modellen in Umgebungen, in denen sich das Eingabefarbformat von den Trainingsdaten unterscheiden kann.
- Ultralytics' Implementierung: Format
bgr aus | bgr an |
|---|---|
|  |
Mosaik (mosaic)
- Bereich:
0.0-1.0 - Standard:
1.0 - Nutzung: Kombiniert vier Trainingsbilder zu einem. Die
mosaicDer Hyperparameter definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, mitmosaic=1.0Sicherstellen, dass alle Bilder kombiniert werden undmosaic=0.0deaktiviert die Transformation. Zum Beispiel mitmosaic=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, mit drei anderen Bildern kombiniert zu werden. - Zweck: Sehr effektiv zur Verbesserung der Erkennung kleiner Objekte und des Kontextverständnisses. Beispielsweise hilft die Mosaik-Augmentierung in Naturschutzprojekten, bei denen Tiere in verschiedenen Entfernungen und Maßstäben erscheinen können, dem Modell, dieselbe Art über verschiedene Größen, Teilverdeckungen und Umweltkontexte hinweg zu erkennen, indem künstlich vielfältige Trainingsbeispiele aus begrenzten Daten erstellt werden.
- Ultralytics' Implementierung: Mosaic
- Hinweis:
- Auch wenn die
mosaicDie Augmentierung macht das Modell robuster, kann aber auch den Trainingsprozess erschweren. - Die
mosaicDie Augmentierung kann gegen Ende des Trainings durch die Einstellung deaktiviert werdenclose_mosaicbis zu der Anzahl von Epochen vor Abschluss, wann es ausgeschaltet werden soll. Zum Beispiel, wennepochsist eingestellt auf200undclose_mosaicist eingestellt auf20wird diemosaicDie Augmentierung wird danach deaktiviert180Epochen. Fallsclose_mosaicist eingestellt auf0wird diemosaicDie Augmentierung wird für den gesamten Trainingsprozess aktiviert. - Das Zentrum des generierten Mosaiks wird anhand von Zufallswerten bestimmt und kann sich entweder innerhalb oder außerhalb des Bildes befinden.
- Die aktuelle Implementierung des
mosaicDie Augmentierung kombiniert 4 Bilder, die zufällig aus dem Datensatz ausgewählt wurden. Wenn der Datensatz klein ist, kann dasselbe Bild mehrmals im selben Mosaik verwendet werden.
- Auch wenn die
mosaic aus | mosaic an |
|---|---|
|  |
Mixup (mixup)
- Bereich:
0.0-1.0 - Standard:
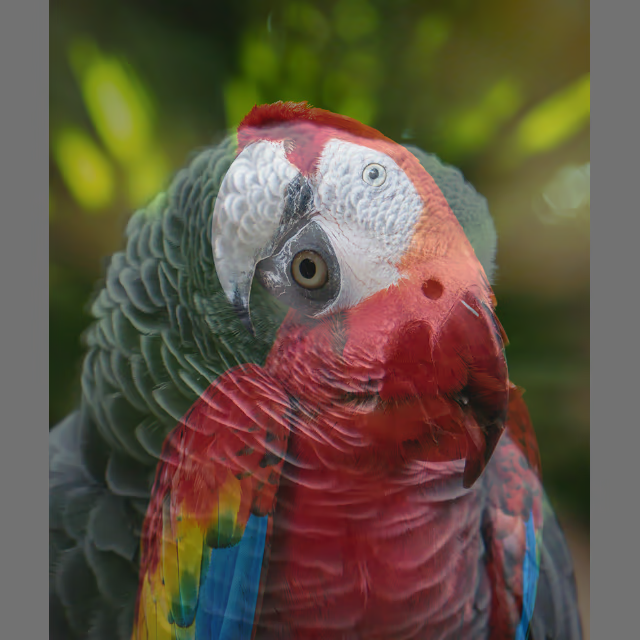
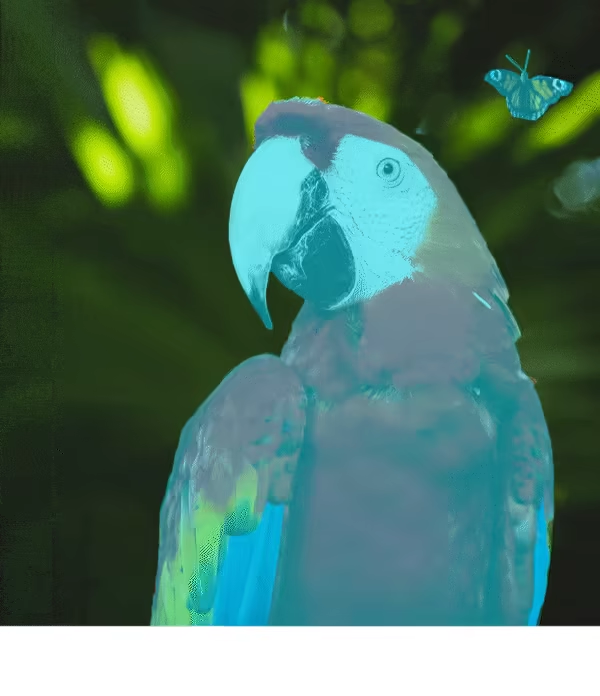
0.0 - Nutzung: Mischt zwei Bilder und ihre Beschriftungen mit einer bestimmten Wahrscheinlichkeit. Die
mixupDer Hyperparameter definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, mitmixup=1.0Sicherstellen, dass alle Bilder gemischt werden undmixup=0.0deaktiviert die Transformation. Zum Beispiel mitmixup=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, mit einem anderen Bild vermischt zu werden. - Zweck: Verbessert die Modellrobustheit und reduziert Overfitting. Beispielsweise hilft Mixup in Einzelhandelsprodukterkennungssystemen dem Modell, robustere Merkmale zu erlernen, indem es Bilder verschiedener Produkte mischt und es lehrt, Artikel auch dann zu identifizieren, wenn sie teilweise sichtbar oder durch andere Produkte in überfüllten Verkaufsregalen verdeckt sind.
- Ultralytics' Implementierung: Mixup
- Hinweis:
- Die
mixupDas Verhältnis ist ein zufälliger Wert, der aus einem a ausgewählt wirdnp.random.beta(32.0, 32.0)Beta-Verteilung, was bedeutet, dass jedes Bild ungefähr 50 % beiträgt, mit leichten Abweichungen.
- Die
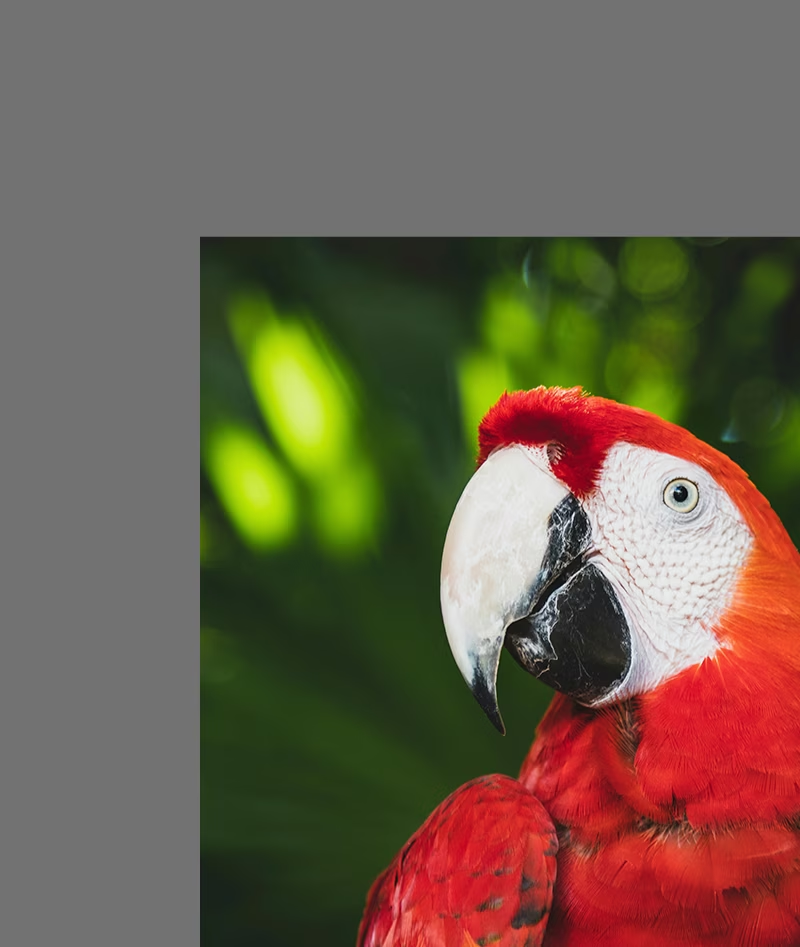
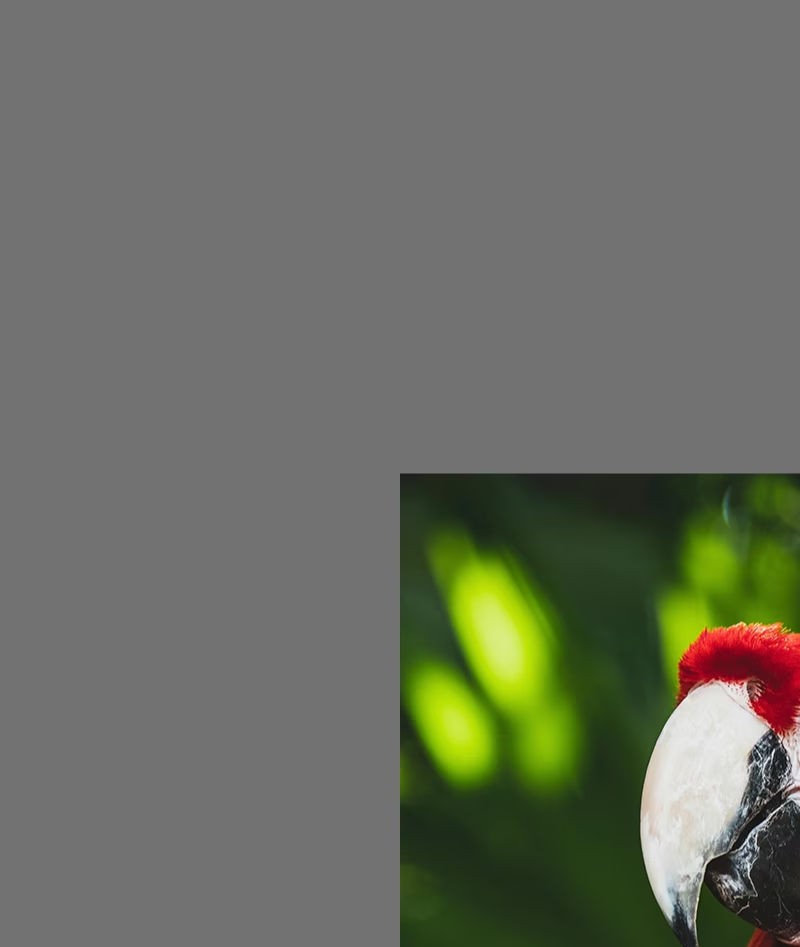
Erstes Bild, mixup aus | Zweites Bild, mixup aus | mixup an |
|---|---|---|
|  |  |
CutMix (cutmix)
- Bereich:
0.0-1.0 - Standard:
0.0 - Nutzung: Schneidet einen rechteckigen Bereich aus einem Bild aus und fügt ihn mit einer bestimmten Wahrscheinlichkeit in ein anderes Bild ein. Die
cutmixDer Hyperparameter definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, mitcutmix=1.0Sicherstellen, dass alle Bilder diese Transformation durchlaufen undcutmix=0.0deaktiviert sie vollständig. Zum Beispiel mitcutmix=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, dass ein Bereich durch einen Patch aus einem anderen Bild ersetzt wird. - Zweck: Verbessert die Modellleistung, indem realistische Okklusionsszenarien erstellt werden, während die lokale Feature-Integrität erhalten bleibt. In autonomen Fahrsystemen hilft Cutmix dem Modell beispielsweise, Fahrzeuge oder Fußgänger auch dann zu erkennen, wenn sie teilweise von anderen Objekten verdeckt werden, wodurch die Erkennungsgenauigkeit in komplexen realen Umgebungen mit überlappenden Objekten verbessert wird.
- Ultralytics' Implementierung: CutMix
- Hinweis:
- Die Grösse und Position des ausgeschnittenen Bereichs wird für jede Anwendung zufällig bestimmt.
- Im Gegensatz zu Mixup, das Pixelwerte global vermischt,
cutmixbehält die ursprünglichen Pixelintensitäten innerhalb der ausgeschnittenen Bereiche bei und bewahrt lokale Merkmale. - Eine Region wird nur dann in das Zielbild eingefügt, wenn sie sich nicht mit vorhandenen Begrenzungsrahmen überschneidet. Zusätzlich werden nur die Begrenzungsrahmen beibehalten, die mindestens
0.1(10%) ihrer ursprünglichen Fläche innerhalb des eingefügten Bereichs erhalten bleiben. - Dieser Schwellenwert für die minimale Begrenzungsrahmenfläche kann mit der aktuellen Implementierung nicht geändert werden und ist auf
0.1standardmäßig.
Erstes Bild, cutmix aus | Zweites Bild, cutmix aus | cutmix an |
|---|---|---|
 |  |  |
Segmentierungsspezifische Augmentierungen
Copy-Paste (copy_paste)
- Bereich:
0.0-1.0 - Standard:
0.0 - Nutzung: Funktioniert nur für Segmentierungsaufgaben. Diese Augmentierung kopiert Objekte innerhalb oder zwischen Bildern basierend auf einer bestimmten Wahrscheinlichkeit, die durch die gesteuert wird
copy_paste_mode. Dercopy_pasteDer Hyperparameter definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, mitcopy_paste=1.0Sicherstellen, dass alle Bilder kopiert werden undcopy_paste=0.0deaktiviert die Transformation. Zum Beispiel mitcopy_paste=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, dass Objekte aus einem anderen Bild kopiert werden. - Zweck: Besonders nützlich für Aufgaben der Instanzsegmentierung und seltene Objektklassen. Beispielsweise kann in der industriellen Fehlererkennung, wo bestimmte Arten von Fehlern selten auftreten, die Copy-Paste-Augmentierung das Auftreten dieser seltenen Fehler künstlich erhöhen, indem sie von einem Bild in ein anderes kopiert werden, wodurch das Modell diese unterrepräsentierten Fälle besser erlernen kann, ohne dass zusätzliche fehlerhafte Stichproben erforderlich sind.
- Ultralytics' Implementierung: CopyPaste
- Hinweis:
- Wie im untenstehenden GIF dargestellt, ist die
copy_pasteDie Augmentierung kann verwendet werden, um Objekte von einem Bild in ein anderes zu kopieren. - Sobald ein Objekt kopiert wurde, unabhängig von der
copy_paste_mode, seine Intersection over Area (IoA) wird mit allen Objekten des Quellbilds berechnet. Wenn alle IoA unterhalb liegen0.3(30%) liegt, wird das Objekt in das Zielbild eingefügt. Wenn nur eines der IoA oben ist0.3, wird das Objekt nicht in das Zielbild eingefügt. - Der IoA-Schwellenwert kann mit der aktuellen Implementierung nicht geändert werden und ist auf Folgendes festgelegt:
0.3standardmäßig.
- Wie im untenstehenden GIF dargestellt, ist die
copy_paste aus | copy_paste an mit copy_paste_mode=flip | Visualisieren Sie die copy_paste Prozess |
|---|---|---|
 |  |  |
Copy-Paste-Modus (copy_paste_mode)
- Optionen:
'flip','mixup' - Standard:
'flip' - Nutzung: Bestimmt die Methode, die verwendet wird für Copy-Paste Augmentierung. Wenn eingestellt auf
'flip', stammen die Objekte aus demselben Bild, während'mixup'ermöglicht das Kopieren von Objekten aus verschiedenen Bildern. - Zweck: Ermöglicht Flexibilität bei der Integration kopierter Objekte in Zielbilder.
- Ultralytics' Implementierung: CopyPaste
- Hinweis:
- Das IoA-Prinzip ist für beide gleich
copy_paste_mode, aber die Art und Weise, wie die Objekte kopiert werden, ist unterschiedlich. - Abhängig von der Bildgröße können Objekte manchmal teilweise oder vollständig außerhalb des Rahmens kopiert werden.
- Abhängig von der Qualität der Polygon-Annotationen können kopierte Objekte leichte Formabweichungen gegenüber den Originalen aufweisen.
- Das IoA-Prinzip ist für beide gleich
| Referenzbild | Ausgewähltes Bild für copy_paste | copy_paste an mit copy_paste_mode=mixup |
|---|---|---|
| |  |
Klassifizierungsspezifische Augmentierungen
Auto Augment (auto_augment)
- Optionen:
'randaugment','autoaugment','augmix',None - Standard:
'randaugment' - Nutzung: Wendet automatisierte Augmentationsrichtlinien für die Klassifizierung an. Die
'randaugment'Option verwendet RandAugment,'autoaugment'verwendet AutoAugment, und'augmix'verwendet AugMix. Wird eingestellt aufNonedeaktiviert die automatische Augmentierung. - Zweck: Optimiert Augmentationsstrategien automatisch für Klassifizierungsaufgaben. Die Unterschiede sind folgende:
- AutoAugment: Dieser Modus wendet vordefinierte Augmentierungsrichtlinien an, die aus Datensätzen wie ImageNet, CIFAR10 und SVHN gelernt wurden. Benutzer können diese bestehenden Richtlinien auswählen, aber keine neuen innerhalb von Torchvision trainieren. Um optimale Augmentierungsstrategien für spezifische Datensätze zu finden, wären externe Bibliotheken oder benutzerdefinierte Implementierungen erforderlich. Referenz zum AutoAugment-Paper.
- RandAugment: Wendet eine zufällige Auswahl von Transformationen mit einheitlicher Stärke an. Dieser Ansatz reduziert den Bedarf an einer umfangreichen Suchphase, wodurch er rechentechnisch effizienter wird und gleichzeitig die Modellrobustheit erhöht. Referenz zum RandAugment Paper.
- AugMix: AugMix ist eine Datenerweiterungsmethode, die die Robustheit des Modells verbessert, indem sie vielfältige Bildvariationen durch zufällige Kombinationen einfacher Transformationen erzeugt. Referenz zum AugMix Paper.
- Ultralytics' Implementierung: classify_augmentations()
- Hinweis:
- Im Wesentlichen besteht der Hauptunterschied zwischen den drei Methoden in der Art und Weise, wie die Augmentationsrichtlinien definiert und angewendet werden.
- Sie können diesen Artikel konsultieren, der die drei Methoden im Detail vergleicht.
Random Erasing (erasing)
- Bereich:
0.0-0.9 - Standard:
0.4 - Nutzung: Löscht zufällig Teile des Bildes während des Klassifizierungstrainings. Die
erasingDer Hyperparameter definiert die Wahrscheinlichkeit, mit der die Transformation angewendet wird, miterasing=0.9Sicherstellen, dass fast alle Bilder gelöscht werden underasing=0.0deaktiviert die Transformation. Zum Beispiel miterasing=0.5, jedes Bild hat eine Wahrscheinlichkeit von 50 %, dass ein Teil davon gelöscht wird. - Zweck: Hilft Modellen, robuste Merkmale zu erlernen und verhindert eine übermäßige Abhängigkeit von bestimmten Bildbereichen. In Gesichtserkennungssystemen hilft das zufällige Löschen beispielsweise Modellen, robuster gegenüber teilweisen Verdeckungen wie Sonnenbrillen, Gesichtsmasken oder anderen Objekten zu werden, die Gesichtsmerkmale teilweise verdecken könnten. Dies verbessert die Leistung in der realen Welt, indem das Modell gezwungen wird, Personen anhand mehrerer Gesichtsmerkmale zu identifizieren, anstatt sich ausschließlich auf markante Merkmale zu verlassen, die möglicherweise verdeckt sind.
- Ultralytics' Implementierung: classify_augmentations()
- Hinweis:
- Die
erasingDie Augmentierung kommt mit einemscale,ratioundvalueHyperparameter, die nicht mit dem Parameter geändert werden können aktuelle ImplementierungIhre Standardwerte sind(0.02, 0.33),(0.3, 3.3)und0, bzw. wie in der PyTorch angegeben Dokumentation. - Die Obergrenze des
erasingHyperparameter ist auf0.9um die Transformation nicht auf alle Bilder anzuwenden.
- Die
erasing aus | erasing an (Beispiel 1) | erasing an (Beispiel 2) | erasing an (Beispiel 3) |
|---|---|---|---|
|  |  |  |
Erweiterte Augmentierungsfunktionen
Benutzerdefinierte Albumentations-Transformationen (augmentations)
- Typ:
listvon Albumentations-Transformationen - Standard:
None - Verwendung: Ermöglicht die Bereitstellung benutzerdefinierter Albumentations-Transformationen für die Datenaugmentation mithilfe der python-API. Dieser Parameter akzeptiert eine Liste von Albumentations-Transformations-Objekten, die während des Trainings anstelle der standardmäßigen Albumentations-Transformationen angewendet werden.
- Zweck: Bietet eine feingranulare Kontrolle über Datenaugmentierungsstrategien durch Nutzung der umfangreichen Bibliothek von Albumentations-Transformationen. Dies ist besonders nützlich, wenn spezialisierte Augmentierungen über die integrierten YOLO-Optionen hinaus benötigt werden, wie erweiterte Farbanpassungen, Rauschinjektion oder domänenspezifische Transformationen.
- Ultralytics' Implementierung: Albumentations
Benutzerdefiniertes Albumentations-Beispiel
import albumentations as A
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n.pt")
# Define custom Albumentations transforms
custom_transforms = [
A.Blur(blur_limit=7, p=0.5),
A.GaussNoise(var_limit=(10.0, 50.0), p=0.3),
A.CLAHE(clip_limit=4.0, p=0.5),
A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.5),
A.HueSaturationValue(hue_shift_limit=20, sat_shift_limit=30, val_shift_limit=20, p=0.5),
]
# Train with custom Albumentations transforms
model.train(
data="coco8.yaml",
epochs=100,
augmentations=custom_transforms, # Pass custom transforms
imgsz=640,
)
import albumentations as A
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n.pt")
# Define advanced custom Albumentations transforms with specific parameters
advanced_transforms = [
A.OneOf(
[
A.MotionBlur(blur_limit=7, p=1.0),
A.MedianBlur(blur_limit=7, p=1.0),
A.GaussianBlur(blur_limit=7, p=1.0),
],
p=0.3,
),
A.OneOf(
[
A.GaussNoise(var_limit=(10.0, 50.0), p=1.0),
A.ISONoise(color_shift=(0.01, 0.05), intensity=(0.1, 0.5), p=1.0),
],
p=0.2,
),
A.CLAHE(clip_limit=4.0, tile_grid_size=(8, 8), p=0.5),
A.RandomBrightnessContrast(brightness_limit=0.3, contrast_limit=0.3, brightness_by_max=True, p=0.5),
A.HueSaturationValue(hue_shift_limit=20, sat_shift_limit=30, val_shift_limit=20, p=0.5),
A.CoarseDropout(
max_holes=8, max_height=32, max_width=32, min_holes=1, min_height=8, min_width=8, fill_value=0, p=0.2
),
]
# Train with advanced custom transforms
model.train(
data="coco8.yaml",
epochs=100,
augmentations=advanced_transforms,
imgsz=640,
)
Wichtige Punkte:
- Nur über die Python API: Benutzerdefinierte Albumentations-Transformationen werden derzeit nur über die python API unterstützt. Sie können nicht über CLI- oder yaml-Konfigurationsdateien angegeben werden.
- Ersetzt Standard-Transformationen: Wenn Sie benutzerdefinierte Transformationen über die bereitstellen
augmentationsParameter ersetzen sie die Standard-Albumentations-Transformationen vollständig. Die Standard-YOLO-Augmentierungen (wiemosaic,hsv_h,hsv_s,degrees, usw.) aktiv bleiben und unabhängig angewendet werden.. - Bounding Box Kompatibilität: Seien Sie vorsichtig bei der Verwendung von räumlichen Transformationen (Transformationen, die die Geometrie des Bildes ändern). Ultralytics handhabt Bounding Box Anpassungen automatisch, aber einige komplexe Transformationen können eine zusätzliche Konfiguration erfordern.
- Umfassende Bibliothek: Albumentations bietet über 70 verschiedene Transformationen. Erkunden Sie die Albumentations-Dokumentation, um alle verfügbaren Optionen zu entdecken.
- Leistungsaspekt: Das Hinzufügen zu vieler Augmentierungen oder die Verwendung rechenintensiver Transformationen kann das Training verlangsamen. Beginnen Sie mit einem kleinen Satz und überwachen Sie die Trainingsgeschwindigkeit.
Häufige Anwendungsfälle:
- Medizinische Bildgebung: Anwendung spezialisierter Transformationen wie elastische Deformationen oder Gitterverzerrungen zur Bildaugmentation von Röntgen- oder MRT-Bildern
- Luft- / Satellitenbilder: Verwenden Sie Transformationen, die für Overhead-Perspektiven optimiert sind
- Bedingungen bei schlechten Lichtverhältnissen: Wenden Sie Rausch- und Helligkeitsanpassungen an, um schwierige Lichtverhältnisse zu simulieren.
- Industrielle Inspektion: Hinzufügen von defektähnlichen Mustern oder Texturvariationen für Qualitätskontrollanwendungen
Kompatibilitätshinweise:
- Erfordert Albumentations Version 1.0.3 oder höher
- Kompatibel mit allen YOLO detect- und segment-Aufgaben
- Nicht anwendbar für Klassifizierungsaufgaben (Klassifizierung verwendet eine andere Augmentierungs-Pipeline)
Für weitere Informationen über Albumentations und verfügbare Transformationen besuchen Sie die offizielle Albumentations-Dokumentation.
FAQ
Es gibt zu viele Augmentierungen zur Auswahl. Woher weiß ich, welche ich verwenden soll?
Die Wahl der richtigen Augmentierungen hängt von Ihrem spezifischen Anwendungsfall und Datensatz ab. Hier sind einige allgemeine Richtlinien, die Ihnen bei der Entscheidung helfen:
- In den meisten Fällen sind leichte Farb- und Helligkeitsabweichungen von Vorteil. Die Standardwerte für
hsv_h,hsv_sundhsv_vsind ein solider Ausgangspunkt. - Wenn der Blickwinkel der Kamera konsistent ist und sich nach dem Einsatz des Modells nicht mehr ändert, können Sie geometrische Transformationen wie
rotation,translation,scale,shear, oderperspectiveWenn sich der Kamerawinkel jedoch ändern kann und das Modell robuster sein muss, ist es besser, diese Augmentationen beizubehalten. - Verwenden Sie den
mosaicAugmentierung nur, wenn teilweise verdeckte Objekte oder mehrere Objekte pro Bild akzeptabel sind und den Label-Wert nicht ändern. Alternativ können Siemosaicaktiv, aber erhöhen Sie dieclose_mosaicWert, um ihn früher im Trainingsprozess zu deaktivieren.
Kurz gesagt: Halten Sie es einfach. Beginnen Sie mit einem kleinen Satz von Augmentierungen und fügen Sie nach Bedarf schrittweise weitere hinzu. Ziel ist es, die Generalisierung und Robustheit des Modells zu verbessern, nicht den Trainingsprozess zu verkomplizieren. Stellen Sie außerdem sicher, dass die von Ihnen angewendeten Augmentierungen die gleiche Datenverteilung widerspiegeln, auf die Ihr Modell in der Produktion treffen wird.
Beim Starten eines Trainings sehe ich ein albumentations: Blur[...] Referenz. Bedeutet das, dass Ultralytics YOLO zusätzliche Augmentierungen wie z. B. Unschärfe durchführt?
Wenn der albumentations package installiert ist, wendet Ultralytics automatisch eine Reihe zusätzlicher Bildaugmentationen mithilfe dieser an. Diese Augmentationen werden intern behandelt und erfordern keine zusätzliche Konfiguration.
Sie finden die vollständige Liste der angewendeten Transformationen in unserem technische Dokumentation, sowie in unserem Albumentations-IntegrationsanleitungBeachten Sie, dass nur die Augmentationen mit einer Wahrscheinlichkeit p größer als 0 sind aktiv. Diese werden gezielt mit niedrigen Frequenzen eingesetzt, um visuelle Artefakte der realen Welt, wie z. B. Unschärfe- oder Graustufeneffekte, nachzubilden.
Sie können auch Ihre eigenen benutzerdefinierten Albumentations-Transformationen über die python-API bereitstellen. Weitere Details finden Sie im Abschnitt Erweiterte Augmentierungsfunktionen.
Beim Starten eines Trainings sehe ich keinen Verweis auf Albumentations. Warum?
Überprüfen Sie, ob die albumentations package installiert ist. Wenn nicht, können Sie es installieren, indem Sie Folgendes ausführen: pip install albumentationsNach der Installation sollte das Paket automatisch von Ultralytics erkannt und verwendet werden.
Wie kann ich meine Augmentierungen anpassen?
Sie können Augmentierungen anpassen, indem Sie eine benutzerdefinierte Datensatzklasse und einen Trainer erstellen. Sie können beispielsweise die standardmäßigen Ultralytics-Klassifizierungsaugmentierungen durch PyTorch's torchvision.transforms.Resize oder andere Transformationen ersetzen. Einzelheiten zur Implementierung finden Sie im Beispiel für benutzerdefiniertes Training in der Klassifizierungsdokumentation.









