Schnellstartanleitung: Raspberry Pi mit Ultralytics YOLO26
Dieser umfassende Leitfaden bietet eine detaillierte Anleitung zur Bereitstellung von Ultralytics YOLO26 auf Raspberry Pi-Geräten. Zusätzlich werden Leistungs-Benchmarks vorgestellt, um die Fähigkeiten von YOLO26 auf diesen kleinen und leistungsstarken Geräten zu demonstrieren.
Ansehen: Raspberry Pi 5 Updates und Verbesserungen.
Hinweis
Dieser Leitfaden wurde mit Raspberry Pi 4 und Raspberry Pi 5 mit dem neuesten Raspberry Pi OS Bookworm (Debian 12) getestet. Die Verwendung dieses Leitfadens für ältere Raspberry Pi-Geräte wie den Raspberry Pi 3 sollte ebenfalls funktionieren, solange dasselbe Raspberry Pi OS Bookworm installiert ist.
Was ist Raspberry Pi?
Raspberry Pi ist ein kleiner, erschwinglicher Single-Board-Computer. Er ist populär geworden für eine Vielzahl von Projekten und Anwendungen, von Hobby-Hausautomation bis hin zu industriellen Anwendungen. Raspberry Pi-Boards sind in der Lage, eine Vielzahl von Betriebssystemen auszuführen, und sie bieten GPIO-Pins (General Purpose Input/Output), die eine einfache Integration mit Sensoren, Aktoren und anderen Hardwarekomponenten ermöglichen. Sie sind in verschiedenen Modellen mit unterschiedlichen Spezifikationen erhältlich, aber sie alle teilen die gleiche grundlegende Designphilosophie, nämlich kostengünstig, kompakt und vielseitig zu sein.
Raspberry Pi Serienvergleich
| Raspberry Pi 3 | Raspberry Pi 4 | Raspberry Pi 5 | |
|---|---|---|---|
| CPU | Broadcom BCM2837, Cortex-A53 64Bit SoC | Broadcom BCM2711, Cortex-A72 64Bit SoC | Broadcom BCM2712, Cortex-A76 64Bit SoC |
| Maximale CPU-Frequenz | 1.4GHz | 1.8GHz | 2.4GHz |
| GPU | Videocore IV | Videocore VI | VideoCore VII |
| Maximale GPU-Frequenz | 400Mhz | 500Mhz | 800Mhz |
| Arbeitsspeicher | 1GB LPDDR2 SDRAM | 1GB, 2GB, 4GB, 8GB LPDDR4-3200 SDRAM | 4GB, 8GB LPDDR4X-4267 SDRAM |
| PCIe | N/A | N/A | 1xPCIe 2.0 Schnittstelle |
| Maximale Leistungsaufnahme | 2.5A@5V | 3A@5V | 5A@5V (PD aktiviert) |
Was ist Raspberry Pi OS?
Raspberry Pi OS (ehemals bekannt als Raspbian) ist ein Unix-ähnliches Betriebssystem, das auf der Debian GNU/Linux-Distribution für die Raspberry Pi-Familie von kompakten Single-Board-Computern basiert, die von der Raspberry Pi Foundation vertrieben werden. Raspberry Pi OS ist hochgradig für den Raspberry Pi mit ARM-CPUs optimiert und verwendet eine modifizierte LXDE-Desktop-Umgebung mit dem Openbox Stacking Window Manager. Raspberry Pi OS wird aktiv weiterentwickelt, wobei der Schwerpunkt auf der Verbesserung der Stabilität und Leistung von möglichst vielen Debian-Paketen auf dem Raspberry Pi liegt.
Raspberry Pi OS auf Raspberry Pi flashen
Als Erstes sollte man nach Erhalt eines Raspberry Pi eine Micro-SD-Karte mit Raspberry Pi OS flashen, sie in das Gerät einsetzen und das Betriebssystem starten. Folgen Sie der ausführlichen Dokumentation zu den ersten Schritten von Raspberry Pi, um Ihr Gerät für die erste Verwendung vorzubereiten.
Ultralytics einrichten
Es gibt zwei Möglichkeiten, das Ultralytics-Paket auf dem Raspberry Pi einzurichten, um Ihr nächstes Computer Vision-Projekt zu erstellen. Sie können jede davon verwenden.
Start mit Docker
Der schnellste Weg, um mit Ultralytics YOLO26 auf Raspberry Pi zu beginnen, ist die Ausführung mit einem vorgefertigten Docker-Image für Raspberry Pi.
Führen Sie den folgenden Befehl aus, um den Docker-Container zu ziehen und auf dem Raspberry Pi auszuführen. Dieser basiert auf dem arm64v8/debian Docker-Image, das Debian 12 (Bookworm) in einer Python3-Umgebung enthält.
t=ultralytics/ultralytics:latest-arm64
sudo docker pull $t && sudo docker run -it --ipc=host $t
Springen Sie danach zum Abschnitt Verwendung von NCNN auf dem Raspberry Pi.
Start ohne Docker
Ultralytics-Paket installieren
Hier installieren wir das Ultralytics-Paket auf dem Raspberry Pi mit optionalen Abhängigkeiten, damit wir die PyTorch-Modelle in andere Formate exportieren können.
Paketliste aktualisieren, pip installieren und auf die neueste Version aktualisieren
sudo apt update sudo apt install python3-pip -y pip install -U pipInstallieren
ultralyticspip-Paket mit optionalen Abhängigkeitenpip install ultralytics[export]Gerät neu starten
sudo reboot
NCNN auf Raspberry Pi verwenden
Von allen von Ultralytics unterstützten Modellexportformaten bietet NCNN die beste Inferenzleistung bei der Arbeit mit Raspberry Pi-Geräten, da NCNN hochgradig für mobile/ eingebettete Plattformen (wie z. B. ARM-Architektur) optimiert ist.
Modell in NCNN konvertieren und Inferenz ausführen
Das YOLO26n-Modell im PyTorch-Format wird in NCNN konvertiert, um Inferenz mit dem exportierten Modell auszuführen.
Beispiel
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo26n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo26n_ncnn_model")
# Run inference
results = ncnn_model("https://ultralytics.com/images/bus.jpg")
# Export a YOLO26n PyTorch model to NCNN format
yolo export model=yolo26n.pt format=ncnn # creates 'yolo26n_ncnn_model'
# Run inference with the exported model
yolo predict model='yolo26n_ncnn_model' source='https://ultralytics.com/images/bus.jpg'
Tipp
Weitere Informationen zu den unterstützten Exportoptionen finden Sie auf der Ultralytics-Dokumentationsseite zu den Bereitstellungsoptionen.
Leistungsverbesserungen von YOLO26 gegenüber YOLO11
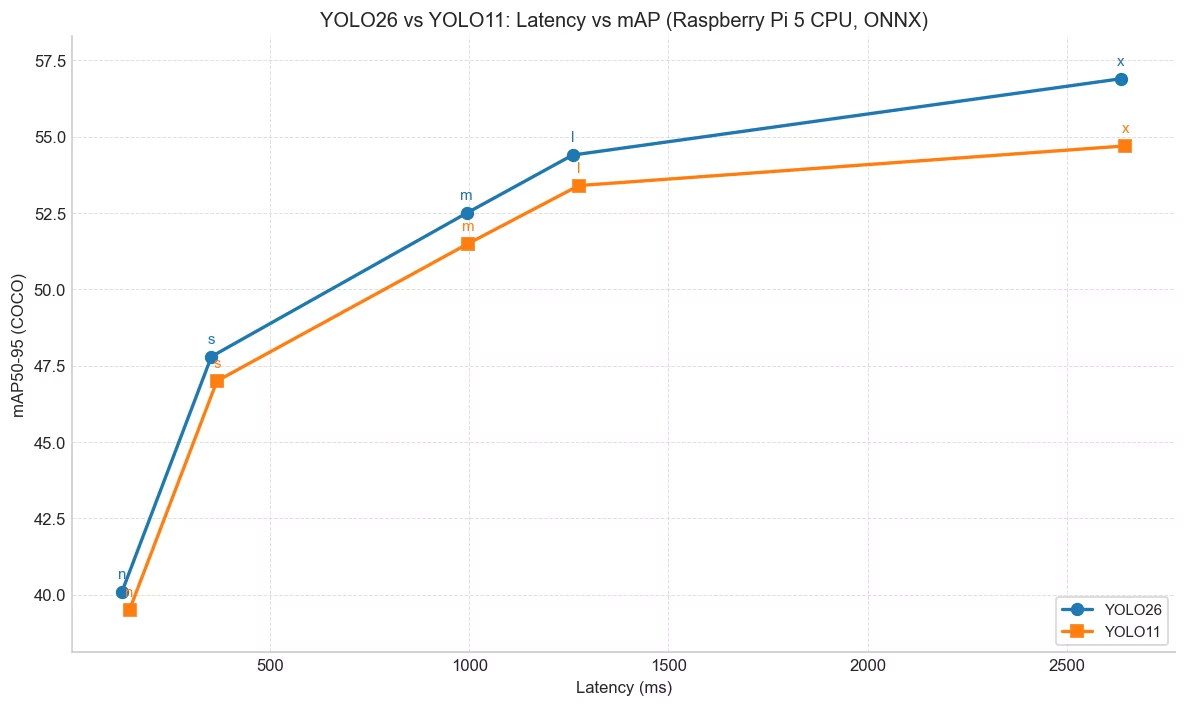
YOLO26 wurde speziell für den Einsatz auf Geräten mit begrenzter Hardwareausstattung wie dem Raspberry Pi 5 entwickelt. Im Vergleich zu YOLO11n erzielt YOLO26n eine Steigerung der FPS um ca. 15 % (6,79 → 7,79) und liefert gleichzeitig mAP höheren mAP 40,1 gegenüber 39,5) bei einer Eingangsgröße von 640 mit ONNX Modellen auf dem Raspberry Pi 5. Die folgende Tabelle und Grafik veranschaulichen diesen Vergleich.
Performance
| Modell | mAP50-95(B) | Inferenzzeit (ms/Bild) |
|---|---|---|
| YOLO26n | 40.1 | 128.42 |
| YOLO26s | 47.8 | 352.84 |
| YOLO26m | 52.5 | 993.78 |
| YOLO26l | 54.4 | 1259.46 |
| YOLO26x | 56.9 | 2636.26 |
| Modell | mAP50-95(B) | Inferenzzeit (ms/Bild) |
|---|---|---|
| YOLO11n | 39.5 | 147.20 |
| YOLO11s | 47.0 | 366.83 |
| YOLO11m | 51.5 | 997.46 |
| YOLO11l | 53.4 | 1274.95 |
| YOLO11x | 54.7 | 2646.76 |
Benchmarked mit Ultralytics 8.4.14.
Raspberry Pi 5 YOLO26-Benchmarks
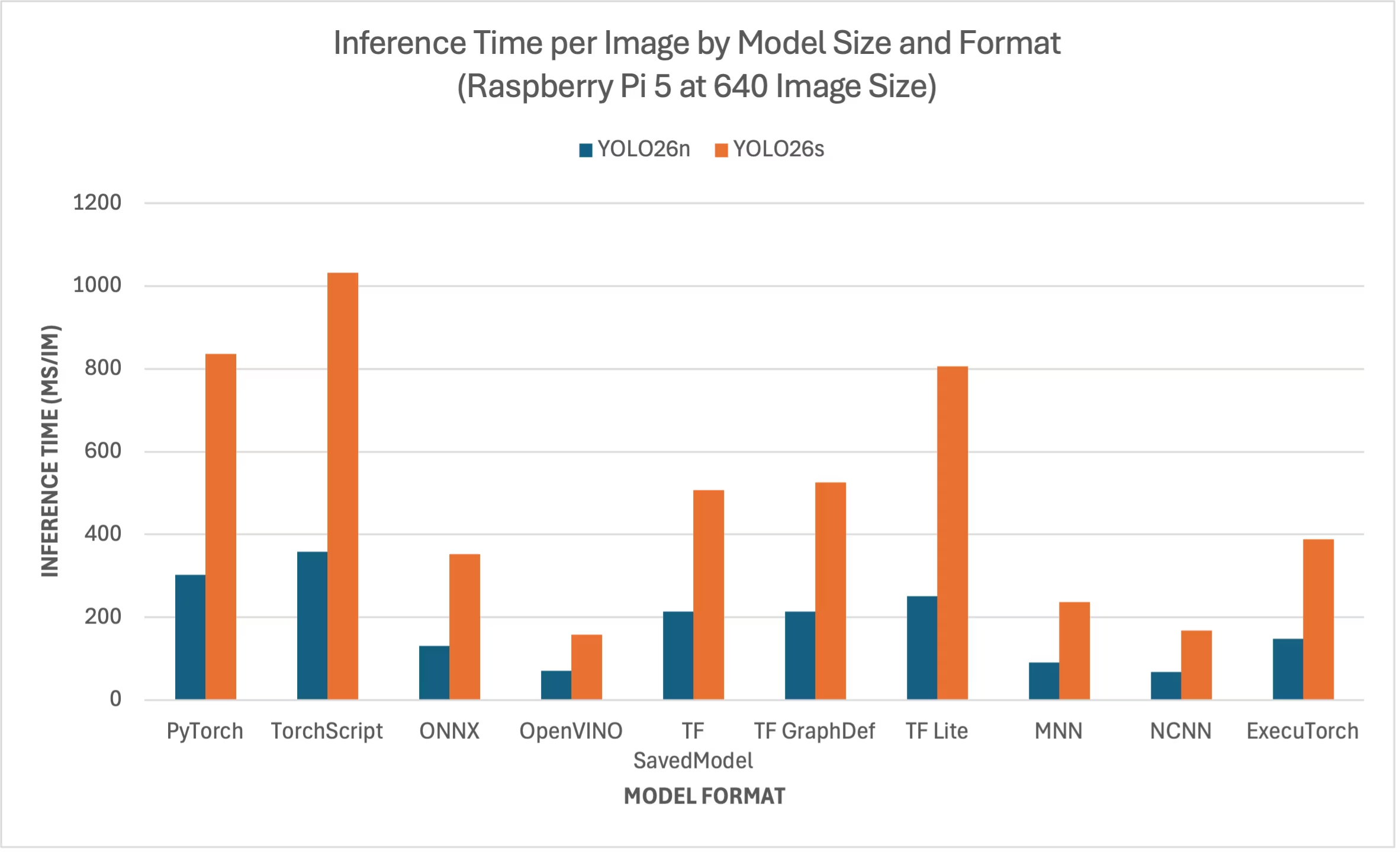
Das Ultralytics führte YOLO26-Benchmarks auf zehn verschiedenen Modellformaten durch, um Geschwindigkeit und Genauigkeit zu messen: PyTorch, TorchScript, ONNX, OpenVINO, TF SavedModel, TF GraphDef, TF , MNN, NCNN, ExecuTorch. Die Benchmarks wurden auf einem Raspberry Pi 5 mit FP32-Genauigkeit und einer Standard-Eingabebildgröße von 640 durchgeführt.
Vergleichsübersicht
Wir haben nur Benchmarks für die Modelle YOLO26n und YOLO26s aufgenommen, da andere Modellgrößen zu groß sind, um auf dem Raspberry Pi ausgeführt zu werden, und keine angemessene Leistung bieten.
Detaillierte Vergleichstabelle
Die folgende Tabelle zeigt die Benchmark-Ergebnisse für zwei verschiedene Modelle (YOLO26n, YOLO26s) in zehn verschiedenen Formaten (PyTorch, TorchScript, ONNX, OpenVINO, TF SavedModel, TF GraphDef, TF , MNN, NCNN, ExecuTorch) auf einem Raspberry Pi 5. Sie enthält den Status, die Größe, die Metrik mAP50(B) und die Inferenzzeit für jede Kombination.
Performance
| Format | Status | Größe auf der Festplatte (MB) | mAP50-95(B) | Inferenzzeit (ms/Bild) |
|---|---|---|---|---|
| PyTorch | ✅ | 5.3 | 0.4798 | 302.15 |
| TorchScript | ✅ | 9.8 | 0.4764 | 357.58 |
| ONNX | ✅ | 9.5 | 0.4764 | 130.33 |
| OpenVINO | ✅ | 9.6 | 0.4818 | 70.74 |
| TF SavedModel | ✅ | 24.6 | 0.4764 | 213.58 |
| TF GraphDef | ✅ | 9.5 | 0.4764 | 213.5 |
| TF Lite | ✅ | 9.9 | 0.4764 | 251.41 |
| MNN | ✅ | 9.4 | 0.4784 | 90.89 |
| NCNN | ✅ | 9.4 | 0.4805 | 67.69 |
| ExecuTorch | ✅ | 9.4 | 0.4764 | 148.36 |
| Format | Status | Größe auf der Festplatte (MB) | mAP50-95(B) | Inferenzzeit (ms/Bild) |
|---|---|---|---|---|
| PyTorch | ✅ | 19.5 | 0.5740 | 836.54 |
| TorchScript | ✅ | 36.8 | 0.5665 | 1032.25 |
| ONNX | ✅ | 36.5 | 0.5665 | 351.96 |
| OpenVINO | ✅ | 36.7 | 0.5654 | 158.6 |
| TF SavedModel | ✅ | 92.2 | 0.5665 | 507.6 |
| TF GraphDef | ✅ | 36.5 | 0.5665 | 525.64 |
| TF Lite | ✅ | 36.9 | 0.5665 | 805.3 |
| MNN | ✅ | 36.4 | 0.5644 | 236.47 |
| NCNN | ✅ | 36.4 | 0.5697 | 168.47 |
| ExecuTorch | ✅ | 36.5 | 0.5665 | 388.72 |
Benchmark mit Ultralytics .4.1
Hinweis
Die Inferenzzeit beinhaltet keine Vor- und Nachbearbeitung.
Unsere Ergebnisse reproduzieren
Um die oben genannten Ultralytics-Benchmarks für alle Exportformate zu reproduzieren, führen Sie diesen Code aus:
Beispiel
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Benchmark YOLO26n speed and accuracy on the COCO128 dataset for all export formats
results = model.benchmark(data="coco128.yaml", imgsz=640)
# Benchmark YOLO26n speed and accuracy on the COCO128 dataset for all export formats
yolo benchmark model=yolo26n.pt data=coco128.yaml imgsz=640
Beachten Sie, dass die Benchmarking-Ergebnisse je nach genauer Hardware- und Softwarekonfiguration eines Systems sowie der aktuellen Systemauslastung zum Zeitpunkt der Benchmark-Ausführung variieren können. Für die zuverlässigsten Ergebnisse verwenden Sie einen Datensatz mit einer großen Anzahl von Bildern, z. B. data='coco.yaml' (5000 Validierungsbilder).
Raspberry Pi Kamera verwenden
Bei der Verwendung von Raspberry Pi für Computer-Vision-Projekte kann es unerlässlich sein, Echtzeit-Video-Feeds zu erfassen, um Inferenz durchzuführen. Der integrierte MIPI CSI-Anschluss am Raspberry Pi ermöglicht den Anschluss offizieller Raspberry Pi-Kameramodule. In diesem Leitfaden haben wir ein Raspberry Pi Camera Module 3 verwendet, um die Video-Feeds zu erfassen und Inferenz mit YOLO26-Modellen durchzuführen.
Tipp
Erfahren Sie mehr über die verschiedenen von Raspberry Pi angebotenen Kameramodule und auch wie Sie mit den Raspberry Pi Kameramodulen beginnen können.
Hinweis
Raspberry Pi 5 verwendet kleinere CSI-Anschlüsse als der Raspberry Pi 4 (15-polig vs. 22-polig), daher benötigen Sie ein 15-polig-auf-22-polig-Adapterkabel, um eine Verbindung zu einer Raspberry Pi-Kamera herzustellen.
Die Kamera testen
Führen Sie den folgenden Befehl aus, nachdem Sie die Kamera an den Raspberry Pi angeschlossen haben. Sie sollten einen Live-Video-Feed von der Kamera für etwa 5 Sekunden sehen.
rpicam-hello
Tipp
Erfahren Sie mehr über rpicam-hello Nutzung in der offiziellen Raspberry Pi-Dokumentation
Inferenz mit Kamera
Es gibt 2 Methoden zur Verwendung der Raspberry Pi-Kamera, um Inferenz auf YOLO26-Modellen auszuführen.
Nutzung
Wir können picamera2 das mit Raspberry Pi OS vorinstalliert ist, um auf die Kamera zuzugreifen und Inferenz auf YOLO26-Modellen auszuführen.
Beispiel
import cv2
from picamera2 import Picamera2
from ultralytics import YOLO
# Initialize the Picamera2
picam2 = Picamera2()
picam2.preview_configuration.main.size = (1280, 720)
picam2.preview_configuration.main.format = "RGB888"
picam2.preview_configuration.align()
picam2.configure("preview")
picam2.start()
# Load the YOLO26 model
model = YOLO("yolo26n.pt")
while True:
# Capture frame-by-frame
frame = picam2.capture_array()
# Run YOLO26 inference on the frame
results = model(frame)
# Visualize the results on the frame
annotated_frame = results[0].plot()
# Display the resulting frame
cv2.imshow("Camera", annotated_frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) == ord("q"):
break
# Release resources and close windows
cv2.destroyAllWindows()
Wir müssen einen TCP-Stream mit rpicam-vid von der angeschlossenen Kamera initiieren, damit wir diese Stream-URL als Eingabe verwenden können, wenn wir später Inferenz betreiben. Führen Sie den folgenden Befehl aus, um den TCP-Stream zu starten.
rpicam-vid -n -t 0 --inline --listen -o tcp://127.0.0.1:8888
Erfahren Sie mehr über rpicam-vid Nutzung in der offiziellen Raspberry Pi-Dokumentation
Beispiel
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Run inference
results = model("tcp://127.0.0.1:8888")
yolo predict model=yolo26n.pt source="tcp://127.0.0.1:8888"
Tipp
In unserem Dokument zu Inferenzquellen erfahren Sie, wie Sie den Bild-/Videoeingabetyp ändern können.
Bewährte Verfahren bei der Verwendung von Raspberry Pi
Es gibt einige Best Practices, die befolgt werden sollten, um maximale Leistung auf Raspberry Pis mit YOLO26 zu ermöglichen.
Verwenden Sie eine SSD
Bei der Verwendung von Raspberry Pi für den kontinuierlichen 24x7-Betrieb wird empfohlen, eine SSD für das System zu verwenden, da eine SD-Karte kontinuierlichen Schreibvorgängen nicht standhält und möglicherweise beschädigt wird. Mit dem integrierten PCIe-Anschluss des Raspberry Pi 5 können Sie jetzt SSDs über einen Adapter wie den NVMe Base für Raspberry Pi 5 anschließen.
Flash ohne GUI
Beim Flashen von Raspberry Pi OS können Sie wählen, ob Sie die Desktop-Umgebung (Raspberry Pi OS Lite) nicht installieren möchten. Dadurch kann etwas RAM auf dem Gerät eingespart werden, wodurch mehr Speicherplatz für die Computer-Vision-Verarbeitung zur Verfügung steht.
Raspberry Pi übertakten
Wenn Sie einen kleinen Leistungsschub wünschen, während Sie Ultralytics YOLO26-Modelle auf Raspberry Pi 5 ausführen, können Sie die CPU von ihren Basis-2,4 GHz auf 2,9 GHz und die GPU von 800 MHz auf 1 GHz übertakten. Wenn das System instabil wird oder abstürzt, reduzieren Sie die Übertaktungswerte in 100-MHz-Schritten. Sorgen Sie für eine ausreichende Kühlung, da Übertaktung die Wärmeentwicklung erhöht und zu thermischem Throttling führen kann.
a. Software aktualisieren
sudo apt update && sudo apt dist-upgradeb. Öffnen Sie die Konfigurationsdatei, um sie zu bearbeiten
sudo nano /boot/firmware/config.txtc. Fügen Sie die folgenden Zeilen am Ende hinzu
arm_freq=3000 gpu_freq=1000 force_turbo=1d. Speichern und beenden Sie, indem Sie STRG + X, dann J drücken und die EINGABETASTE drücken
e. Starten Sie den Raspberry Pi neu
Nächste Schritte
Sie haben YOLO erfolgreich auf Ihrem Raspberry Pi eingerichtet. Für weiteres Lernen und Unterstützung besuchen Sie die Ultralytics YOLO26 Docs und die Kashmir World Foundation.
Danksagungen und Zitationen
Dieser Leitfaden wurde ursprünglich von Daan Eeltink für die Kashmir World Foundation erstellt, einer Organisation, die sich dem Einsatz von YOLO für den Schutz gefährdeter Arten widmet. Wir würdigen ihre Pionierarbeit und ihren Bildungsschwerpunkt im Bereich der Objekterkennungstechnologien.
Weitere Informationen zu den Aktivitäten der Kashmir World Foundation finden Sie auf ihrer Website.
FAQ
Wie richte ich Ultralytics YOLO26 auf einem Raspberry Pi ohne Docker ein?
Um Ultralytics YOLO26 auf einem Raspberry Pi ohne Docker einzurichten, befolgen Sie diese Schritte:
- Aktualisieren Sie die Paketliste und installieren Sie
pip:sudo apt update sudo apt install python3-pip -y pip install -U pip - Installieren Sie das Ultralytics-Paket mit optionalen Abhängigkeiten:
pip install ultralytics[export] - Starten Sie das Gerät neu, um die Änderungen zu übernehmen:
sudo reboot
Detaillierte Anweisungen finden Sie im Abschnitt Start ohne Docker.
Warum sollte ich das NCNN-Format von Ultralytics YOLO26 auf Raspberry Pi für KI-Aufgaben verwenden?
Das NCNN-Format von Ultralytics YOLO26 ist hochoptimiert für mobile und eingebettete Plattformen, was es ideal für die Ausführung von KI-Aufgaben auf Raspberry Pi-Geräten macht. NCNN maximiert die Inferenzleistung durch die Nutzung der ARM-Architektur und bietet eine schnellere und effizientere Verarbeitung im Vergleich zu anderen Formaten. Weitere Details zu unterstützten Exportoptionen finden Sie auf der Ultralytics-Dokumentationsseite zu Bereitstellungsoptionen.
Wie kann ich ein YOLO26-Modell in das NCNN-Format für die Verwendung auf Raspberry Pi konvertieren?
Sie können ein PyTorch YOLO26-Modell entweder mit Python- oder CLI-Befehlen in das NCNN-Format konvertieren:
Beispiel
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo26n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo26n_ncnn_model")
# Run inference
results = ncnn_model("https://ultralytics.com/images/bus.jpg")
# Export a YOLO26n PyTorch model to NCNN format
yolo export model=yolo26n.pt format=ncnn # creates 'yolo26n_ncnn_model'
# Run inference with the exported model
yolo predict model='yolo26n_ncnn_model' source='https://ultralytics.com/images/bus.jpg'
Weitere Informationen finden Sie im Abschnitt NCNN auf Raspberry Pi verwenden.
Welche Hardware-Unterschiede zwischen Raspberry Pi 4 und Raspberry Pi 5 sind für die Ausführung von YOLO26 relevant?
Die wichtigsten Unterschiede sind:
- CPU: Raspberry Pi 4 verwendet Broadcom BCM2711, Cortex-A72 64-Bit SoC, während Raspberry Pi 5 Broadcom BCM2712, Cortex-A76 64-Bit SoC verwendet.
- Maximale CPU-Frequenz: Raspberry Pi 4 hat eine maximale Frequenz von 1,8 GHz, während Raspberry Pi 5 2,4 GHz erreicht.
- Speicher: Raspberry Pi 4 bietet bis zu 8 GB LPDDR4-3200 SDRAM, während Raspberry Pi 5 mit LPDDR4X-4267 SDRAM ausgestattet ist, das in Varianten mit 4 GB und 8 GB erhältlich ist.
Diese Verbesserungen tragen zu besseren Leistungsbenchmarks für YOLO26-Modelle auf dem Raspberry Pi 5 im Vergleich zum Raspberry Pi 4 bei. Weitere Details finden Sie in der Tabelle Raspberry Pi Serienvergleich.
Wie kann ich ein Raspberry Pi Kameramodul einrichten, um mit Ultralytics YOLO26 zu arbeiten?
Es gibt zwei Methoden, eine Raspberry Pi Kamera für die YOLO26-Inferenz einzurichten:
Verwendung von
picamera2:import cv2 from picamera2 import Picamera2 from ultralytics import YOLO picam2 = Picamera2() picam2.preview_configuration.main.size = (1280, 720) picam2.preview_configuration.main.format = "RGB888" picam2.preview_configuration.align() picam2.configure("preview") picam2.start() model = YOLO("yolo26n.pt") while True: frame = picam2.capture_array() results = model(frame) annotated_frame = results[0].plot() cv2.imshow("Camera", annotated_frame) if cv2.waitKey(1) == ord("q"): break cv2.destroyAllWindows()Verwenden eines TCP-Streams:
rpicam-vid -n -t 0 --inline --listen -o tcp://127.0.0.1:8888from ultralytics import YOLO model = YOLO("yolo26n.pt") results = model("tcp://127.0.0.1:8888")
Detaillierte Anweisungen zur Einrichtung finden Sie im Abschnitt Inferenz mit Kamera.








