Gestión de Estacionamiento con Ultralytics YOLO26 🚀
¿Qué es un sistema de gestión de estacionamiento?
La gestión de estacionamiento con Ultralytics YOLO26 garantiza un estacionamiento eficiente y seguro al organizar los espacios y monitorear la disponibilidad. YOLO26 puede mejorar la gestión de estacionamientos mediante la detect de vehículos en tiempo real y la obtención de información sobre la ocupación de los mismos.
Ver: Cómo crear un sistema de gestión de aparcamientos con Ultralytics | Detección de plazas en tiempo real 🚗
Ventajas del Sistema de Gestión de Aparcamiento
- Eficiencia: La gestión de aparcamientos optimiza el uso de las plazas de aparcamiento y reduce la congestión.
- Seguridad y Vigilancia: La gestión de estacionamiento con YOLO26 mejora la seguridad tanto de personas como de vehículos mediante medidas de vigilancia y seguridad.
- Reducción de Emisiones: La gestión de estacionamiento con YOLO26 gestiona el flujo de tráfico para minimizar el tiempo de inactividad y las emisiones en los estacionamientos.
Aplicaciones en el mundo real
| Sistema de gestión de estacionamiento | Sistema de gestión de estacionamiento |
|---|---|
 |  |
| Gestión de estacionamiento vista aérea con Ultralytics YOLO26 | Gestión de estacionamiento vista superior con Ultralytics YOLO26 |
Flujo de trabajo del código del sistema de gestión de estacionamiento
La selección de puntos ahora es fácil
Elegir los puntos de estacionamiento es una tarea crítica y compleja en los sistemas de gestión de estacionamiento. Ultralytics agiliza este proceso proporcionando una herramienta "Anotador de espacios de estacionamiento" que le permite definir las áreas del estacionamiento, que pueden utilizarse posteriormente para un procesamiento adicional.
Paso 1: Capture un fotograma del video o transmisión de la cámara donde desee administrar el estacionamiento.
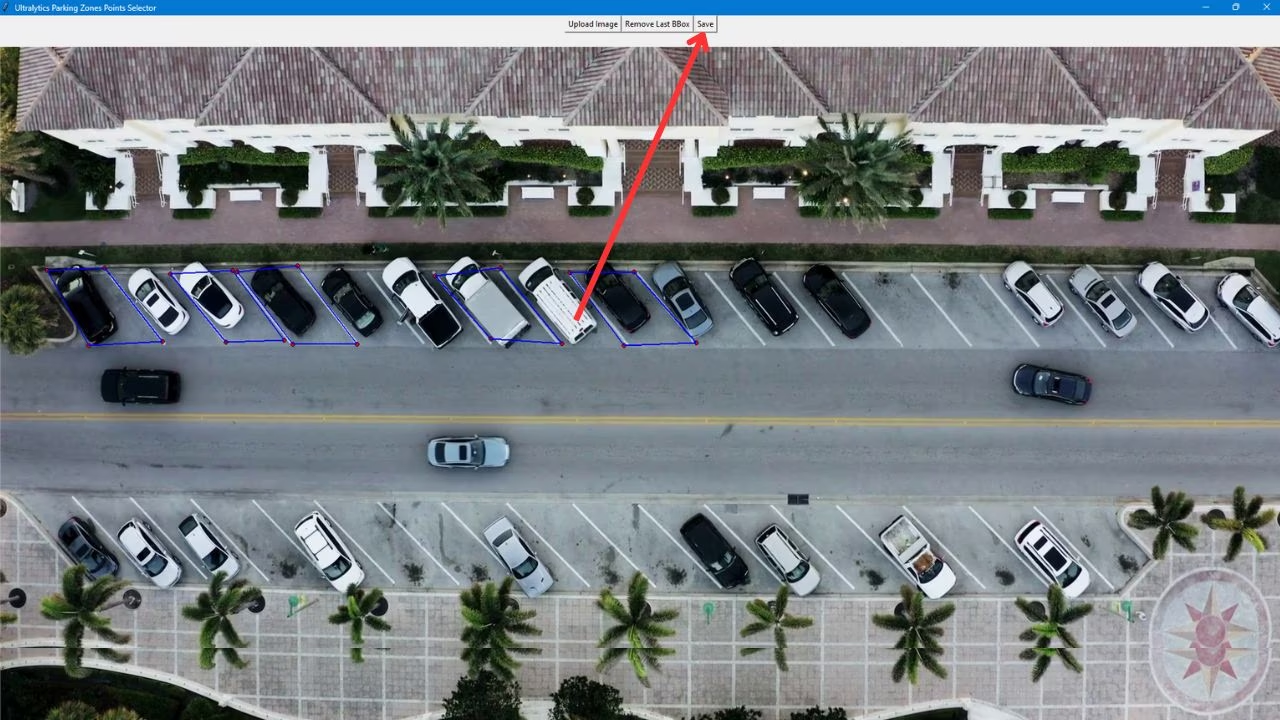
Paso 2: Utilice el código proporcionado para iniciar una interfaz gráfica, donde puede seleccionar una imagen y comenzar a delinear las regiones de estacionamiento haciendo clic con el mouse para crear polígonos.
Anotador de espacios de estacionamiento Ultralytics YOLO
Paso adicional para la instalación tkinter
Generalmente, tkinter viene preinstalado con Python. Sin embargo, si no fuera así, puede instalarlo siguiendo los pasos resaltados:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - Arquitectura:
sudo pacman -S tk - Windows: Reinstala python y habilita la casilla de verificación
tcl/tk and IDLEen Características opcionales durante la instalación - MacOS: Reinstala python desde https://www.python.org/downloads/macos/ o
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
Paso 3: Después de definir las áreas de estacionamiento con polígonos, haz clic en save para guardar un archivo JSON con los datos en tu directorio de trabajo.
Paso 4: Ahora puede utilizar el código proporcionado para la gestión del estacionamiento con Ultralytics YOLO.
Gestión de estacionamiento utilizando Ultralytics YOLO
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
Nota
Crea primero las anotaciones de las zonas de aparcamiento utilizando ParkingPtsSelection() en Python paso 2 anterior) y, a continuación, pasa el archivo JSON al CLI de CLI .
ParkingManagement Argumentos
Aquí tiene una tabla con el ParkingManagement argumentos:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
model | str | None | Ruta a un archivo de modelo Ultralytics YOLO. |
json_file | str | None | Ruta al archivo JSON que contiene todos los datos de coordenadas de estacionamiento. |
El ParkingManagement la solución permite el uso de varios track parámetros:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Especifica el algoritmo de seguimiento a utilizar, p. ej., bytetrack.yaml o botsort.yaml. |
conf | float | 0.1 | Establece el umbral de confianza para las detecciones; los valores más bajos permiten rastrear más objetos, pero pueden incluir falsos positivos. |
iou | float | 0.7 | Establece el umbral de Intersección sobre Unión (IoU) para filtrar detecciones superpuestas. |
classes | list | None | Filtra los resultados por índice de clase. Por ejemplo, classes=[0, 2, 3] solo rastrea las clases especificadas. |
verbose | bool | True | Controla la visualización de los resultados del seguimiento, proporcionando una salida visual de los objetos rastreados. |
device | str | None | Especifica el dispositivo para la inferencia (p. ej., cpu, cuda:0 o 0). Permite a los usuarios seleccionar entre CPU, una GPU específica u otros dispositivos de cálculo para la ejecución del modelo. |
Además, se admiten las siguientes opciones de visualización:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
show | bool | False | Si True, muestra las imágenes o vídeos anotados en una ventana. Útil para obtener información visual inmediata durante el desarrollo o las pruebas. |
line_width | int or None | None | Especifica el ancho de línea de los cuadros delimitadores. Si None, el ancho de línea se ajusta automáticamente en función del tamaño de la imagen. Proporciona personalización visual para mayor claridad. |
Preguntas frecuentes
¿Cómo mejora Ultralytics YOLO26 los sistemas de gestión de estacionamiento?
Ultralytics YOLO26 mejora significativamente los sistemas de gestión de estacionamientos al proporcionar detección y monitoreo de vehículos en tiempo real. Esto se traduce en un uso optimizado de los espacios de estacionamiento, una reducción de la congestión y una mayor seguridad mediante la vigilancia continua. El Sistema de Gestión de Estacionamientos permite un flujo de tráfico eficiente, minimizando los tiempos de inactividad y las emisiones en los estacionamientos, contribuyendo así a la sostenibilidad ambiental. Para más detalles, consulte el flujo de trabajo del código de gestión de estacionamientos.
¿Cuáles son los beneficios de usar Ultralytics YOLO26 para el estacionamiento inteligente?
El uso de Ultralytics YOLO26 para el estacionamiento inteligente aporta numerosos beneficios:
- Eficiencia: Optimiza el uso de las plazas de aparcamiento y disminuye la congestión.
- Seguridad: Mejora la vigilancia y garantiza la seguridad de vehículos y peatones.
- Impacto ambiental: Ayuda a reducir las emisiones minimizando los tiempos de inactividad de los vehículos. Explore más beneficios en la sección Ventajas del sistema de gestión de estacionamiento.
¿Cómo puedo definir espacios de estacionamiento usando Ultralytics YOLO26?
Definir espacios de estacionamiento es sencillo con Ultralytics YOLO26:
- Capture un fotograma de un video o transmisión de cámara.
- Utiliza el código proporcionado para iniciar una GUI para seleccionar una imagen y dibujar polígonos para definir las plazas de aparcamiento.
- Guarda los datos etiquetados en formato JSON para su posterior procesamiento. Para obtener instrucciones completas, consulta la sección de selección de puntos anterior.
¿Puedo personalizar el modelo YOLO26 para necesidades específicas de gestión de estacionamiento?
Sí, Ultralytics YOLO26 permite la personalización para necesidades específicas de gestión de estacionamientos. Puede ajustar parámetros como el colores de región ocupada y disponible, márgenes para la visualización de texto, y mucho más. Utilizando el ParkingManagement de la clase argumentos, puedes adaptar el modelo para que se ajuste a tus requisitos particulares, garantizando la máxima eficiencia y eficacia.
¿Cuáles son algunas aplicaciones reales de Ultralytics YOLO26 en la gestión de estacionamientos?
Ultralytics YOLO26 se utiliza en diversas aplicaciones del mundo real para la gestión de estacionamientos, incluyendo:
- Detección de Espacios de Estacionamiento: Identifica con precisión los espacios disponibles y ocupados.
- Vigilancia: Mejora de la seguridad mediante la monitorización en tiempo real.
- Gestión del flujo de tráfico: Reducción de los tiempos de inactividad y la congestión con una gestión eficiente del tráfico. Se pueden encontrar imágenes que muestran estas aplicaciones en aplicaciones del mundo real.






