Conteo de objetos usando Ultralytics YOLO26
¿Qué es el conteo de objetos?
![]()
El conteo de objetos con Ultralytics YOLO26 implica la identificación y el conteo precisos de objetos específicos en videos y transmisiones de cámaras. YOLO26 sobresale en aplicaciones en tiempo real, proporcionando un conteo de objetos eficiente y preciso para diversos escenarios como el análisis de multitudes y la vigilancia, gracias a sus algoritmos de vanguardia y capacidades de aprendizaje profundo.
Ver: Cómo realizar conteo de objetos en tiempo real con Ultralytics YOLO26 🚀
Ventajas del Conteo de Objetos
- Optimización de recursos: El conteo de objetos facilita la gestión eficiente de los recursos al proporcionar recuentos precisos, optimizando la asignación de recursos en aplicaciones como la gestión de inventario.
- Seguridad mejorada: El conteo de objetos mejora la seguridad y la vigilancia mediante el seguimiento y el conteo precisos de entidades, lo que ayuda en la detección proactiva de amenazas.
- Toma de decisiones informada: El conteo de objetos ofrece información valiosa para la toma de decisiones, optimizando los procesos en el comercio minorista, la gestión del tráfico y otros dominios.
Aplicaciones en el mundo real
| Logística | Acuicultura |
|---|---|
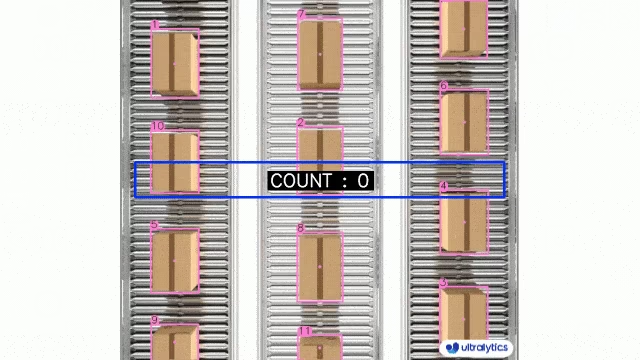 | 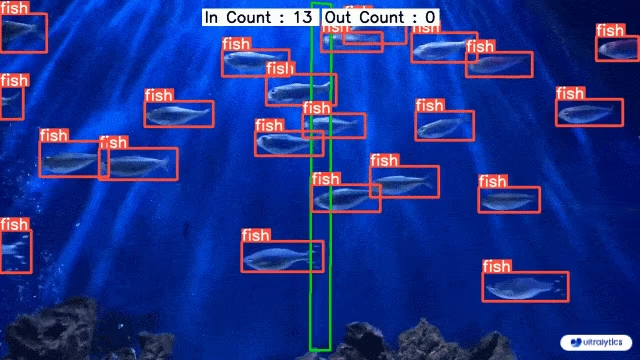 |
| Conteo de paquetes en cinta transportadora usando Ultralytics YOLO26 | Conteo de peces en el mar usando Ultralytics YOLO26 |
Conteo de objetos utilizando Ultralytics YOLO
# Run a counting example
yolo solutions count show=True
# Pass a source video
yolo solutions count source="path/to/video.mp4"
# Pass region coordinates
yolo solutions count region="[(20, 400), (1080, 400), (1080, 360), (20, 360)]"
El region argumento acepta dos puntos (para una línea) o un polígono con tres o más puntos. Defina las coordenadas en el orden en que deben conectarse para que el contador sepa exactamente dónde se producen las entradas y las salidas.
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# region_points = [(20, 400), (1080, 400)] # line counting
region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # rectangular region
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # polygon region
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("object_counting_output.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize object counter object
counter = solutions.ObjectCounter(
show=True, # display the output
region=region_points, # pass region points
model="yolo26n.pt", # model="yolo26n-obb.pt" for object counting with OBB model.
# classes=[0, 2], # count specific classes, e.g., person and car with the COCO pretrained model.
# tracker="botsort.yaml", # choose trackers, e.g., "bytetrack.yaml"
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = counter(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
ObjectCounter Argumentos
Aquí tiene una tabla con el ObjectCounter argumentos:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
model | str | None | Ruta a un archivo de modelo Ultralytics YOLO. |
show_in | bool | True | Indica si se deben mostrar los conteos de entrada en la transmisión de video. |
show_out | bool | True | Indica si se deben mostrar los conteos de salida en la transmisión de video. |
region | list | '[(20, 400), (1260, 400)]' | Lista de puntos que definen la región de conteo. |
El ObjectCounter la solución permite el uso de varios track argumentos:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
tracker | str | 'botsort.yaml' | Especifica el algoritmo de seguimiento a utilizar, p. ej., bytetrack.yaml o botsort.yaml. |
conf | float | 0.1 | Establece el umbral de confianza para las detecciones; los valores más bajos permiten rastrear más objetos, pero pueden incluir falsos positivos. |
iou | float | 0.7 | Establece el umbral de Intersección sobre Unión (IoU) para filtrar detecciones superpuestas. |
classes | list | None | Filtra los resultados por índice de clase. Por ejemplo, classes=[0, 2, 3] solo rastrea las clases especificadas. |
verbose | bool | True | Controla la visualización de los resultados del seguimiento, proporcionando una salida visual de los objetos rastreados. |
device | str | None | Especifica el dispositivo para la inferencia (p. ej., cpu, cuda:0 o 0). Permite a los usuarios seleccionar entre CPU, una GPU específica u otros dispositivos de cálculo para la ejecución del modelo. |
Adicionalmente, los argumentos de visualización que se enumeran a continuación son compatibles:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
show | bool | False | Si True, muestra las imágenes o vídeos anotados en una ventana. Útil para obtener información visual inmediata durante el desarrollo o las pruebas. |
line_width | int or None | None | Especifica el ancho de línea de los cuadros delimitadores. Si None, el ancho de línea se ajusta automáticamente en función del tamaño de la imagen. Proporciona personalización visual para mayor claridad. |
show_conf | bool | True | Muestra la puntuación de confianza para cada detección junto con la etiqueta. Ofrece información sobre la certeza del modelo para cada detección. |
show_labels | bool | True | Muestra etiquetas para cada detección en la salida visual. Proporciona una comprensión inmediata de los objetos detectados. |
Preguntas frecuentes
¿Cómo cuento objetos en un video usando Ultralytics YOLO26?
Para contar objetos en un video usando Ultralytics YOLO26, puedes seguir estos pasos:
- Importe las bibliotecas necesarias (
cv2,ultralytics). - Define la región de conteo (por ejemplo, un polígono, una línea, etc.).
- Configure la captura de vídeo e inicialice el contador de objetos.
- Procese cada fotograma para track objetos y contarlos dentro de la región definida.
Aquí tiene un ejemplo sencillo para contar en una región:
import cv2
from ultralytics import solutions
def count_objects_in_region(video_path, output_video_path, model_path):
"""Count objects in a specific region within a video."""
cap = cv2.VideoCapture(video_path)
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter(output_video_path, cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)]
counter = solutions.ObjectCounter(show=True, region=region_points, model=model_path)
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = counter(im0)
video_writer.write(results.plot_im)
cap.release()
video_writer.release()
cv2.destroyAllWindows()
count_objects_in_region("path/to/video.mp4", "output_video.avi", "yolo26n.pt")
Para configuraciones y opciones más avanzadas, consulta la solución RegionCounter para contar objetos en varias regiones simultáneamente.
¿Cuáles son las ventajas de usar Ultralytics YOLO26 para el conteo de objetos?
El uso de Ultralytics YOLO26 para el conteo de objetos ofrece varias ventajas:
- Optimización de recursos: Facilita la gestión eficiente de los recursos al proporcionar recuentos precisos, lo que ayuda a optimizar la asignación de recursos en industrias como la gestión de inventario.
- Seguridad mejorada: Mejora la seguridad y la vigilancia mediante el seguimiento y el conteo precisos de entidades, lo que ayuda en la detección proactiva de amenazas y los sistemas de seguridad.
- Toma de decisiones informada: Ofrece información valiosa para la toma de decisiones, optimizando procesos en dominios como el comercio minorista, la gestión del tráfico y más.
- Procesamiento en tiempo real: La arquitectura de YOLO26 permite la inferencia en tiempo real, lo que lo hace adecuado para transmisiones de video en vivo y aplicaciones sensibles al tiempo.
Para ejemplos de implementación y aplicaciones prácticas, explora la solución TrackZone para el seguimiento de objetos en zonas específicas.
¿Cómo puedo contar clases específicas de objetos usando Ultralytics YOLO26?
Para contar clases específicas de objetos usando Ultralytics YOLO26, debes especificar las clases que te interesan durante la fase de track. A continuación se muestra un ejemplo en python:
import cv2
from ultralytics import solutions
def count_specific_classes(video_path, output_video_path, model_path, classes_to_count):
"""Count specific classes of objects in a video."""
cap = cv2.VideoCapture(video_path)
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter(output_video_path, cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
line_points = [(20, 400), (1080, 400)]
counter = solutions.ObjectCounter(show=True, region=line_points, model=model_path, classes=classes_to_count)
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or processing is complete.")
break
results = counter(im0)
video_writer.write(results.plot_im)
cap.release()
video_writer.release()
cv2.destroyAllWindows()
count_specific_classes("path/to/video.mp4", "output_specific_classes.avi", "yolo26n.pt", [0, 2])
En este ejemplo, classes_to_count=[0, 2] significa que cuenta objetos de la clase 0 y 2 (p. ej., persona y coche en el dataset COCO). Puede encontrar más información sobre los índices de clase en el Documentación del conjunto de datos COCO.
¿Por qué debería usar YOLO26 en lugar de otros modelos de detección de objetos para aplicaciones en tiempo real?
Ultralytics YOLO26 ofrece varias ventajas sobre otros modelos de detección de objetos como Faster R-CNN, SSD y versiones anteriores de YOLO:
- Velocidad y Eficiencia: YOLO26 ofrece capacidades de procesamiento en tiempo real, lo que lo hace ideal para aplicaciones que requieren inferencia de alta velocidad, como la vigilancia y la conducción autónoma.
- Precisión: Proporciona una precisión de última generación para tareas de detección y seguimiento de objetos, reduciendo el número de falsos positivos y mejorando la fiabilidad general del sistema.
- Facilidad de Integración: YOLO26 ofrece una integración perfecta con diversas plataformas y dispositivos, incluyendo dispositivos móviles y de borde, lo cual es crucial para las aplicaciones de IA modernas.
- Flexibilidad: Admite varias tareas como la detección de objetos, la segmentación y el seguimiento con modelos configurables para satisfacer los requisitos específicos del caso de uso.
Consulta la Documentación de YOLO26 de Ultralytics para una inmersión más profunda en sus características y comparaciones de rendimiento.
¿Puedo usar YOLO26 para aplicaciones avanzadas como el análisis de multitudes y la gestión del tráfico?
Sí, Ultralytics YOLO26 es perfectamente adecuado para aplicaciones avanzadas como el análisis de multitudes y la gestión del tráfico debido a sus capacidades de detección en tiempo real, escalabilidad y flexibilidad de integración. Sus características avanzadas permiten el track de objetos, el conteo y la clasificación de alta precisión en entornos dinámicos. Los casos de uso de ejemplo incluyen:
- Análisis de Multitudes: Supervise y gestione grandes concentraciones, garantizando la seguridad y optimizando el flujo de la multitud con el conteo basado en regiones.
- Gestión del tráfico: Realice un seguimiento y cuente los vehículos, analice los patrones de tráfico y gestione la congestión en tiempo real con capacidades de estimación de velocidad.
- Análisis minorista: Analice los patrones de movimiento de los clientes y las interacciones con los productos para optimizar la distribución de la tienda y mejorar la experiencia del cliente.
- Automatización industrial: Contar productos en cintas transportadoras y supervisar las líneas de producción para el control de calidad y la mejora de la eficiencia.
Para aplicaciones más especializadas, explora las Soluciones de Ultralytics para un conjunto completo de herramientas diseñadas para los desafíos de la visión artificial en el mundo real.








