Aperçu de l'évaluation et du réglage fin des modèles
Introduction
Une fois que vous avez entraîné votre modèle de vision par ordinateur, il est essentiel de l'évaluer et de l'affiner pour qu'il fonctionne de manière optimale. Il ne suffit pas d'entraîner votre modèle. Vous devez vous assurer que votre modèle est précis, efficace et remplit l'objectif de votre projet de vision par ordinateur. En évaluant et en affinant votre modèle, vous pouvez identifier les faiblesses, améliorer sa précision et améliorer ses performances globales.
Regarder : Aperçu de l'évaluation et du réglage fin du modèle | Conseils pour améliorer la précision moyenne
Dans ce guide, nous partageons des informations sur l'évaluation et le réglage fin des modèles afin de rendre cette étape d'un projet de vision par ordinateur plus accessible. Nous expliquons comment comprendre les métriques d'évaluation et mettre en œuvre des techniques de réglage fin, vous donnant les connaissances nécessaires pour améliorer les capacités de votre modèle.
Évaluation des performances du modèle à l'aide de mesures
L'évaluation des performances d'un modèle nous aide à comprendre son efficacité. Diverses mesures sont utilisées pour mesurer les performances. Ces mesures de performance fournissent des informations numériques claires qui peuvent guider les améliorations afin de s'assurer que le modèle atteint ses objectifs. Examinons de plus près quelques mesures clés.
Score de confiance
Le score de confiance représente la certitude du modèle qu'un objet détecté appartient à une classe particulière. Il varie de 0 à 1, les scores plus élevés indiquant une plus grande confiance. Le score de confiance aide à filtrer les prédictions ; seules les détections avec des scores de confiance supérieurs à un seuil spécifié sont considérées comme valides.
Conseil rapide : Lors de l'exécution d'inférences, si vous ne voyez aucune prédiction et que vous avez tout vérifié, essayez de réduire le score de confiance. Parfois, le seuil est trop élevé, ce qui amène le modèle à ignorer les prédictions valides. La réduction du score permet au modèle de considérer davantage de possibilités. Cela pourrait ne pas correspondre aux objectifs de votre projet, mais c'est un bon moyen de voir ce que le modèle peut faire et de décider comment l'affiner.
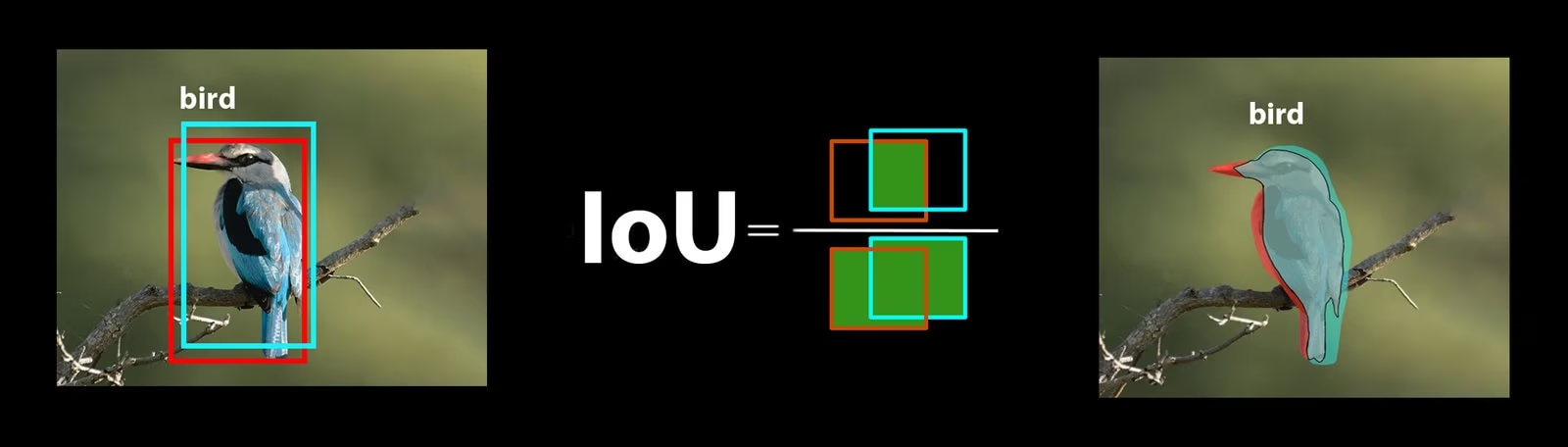
Intersection sur Union
Intersection sur Union (IoU) est une mesure dans la détection d’objets qui mesure la qualité du chevauchement entre la boîte englobante prédite et la boîte englobante de vérité terrain. Les valeurs IoU varient de 0 à 1, où 1 représente une correspondance parfaite. L’IoU est essentiel, car il mesure la précision avec laquelle les limites prédites correspondent aux limites réelles de l’objet.
Précision moyenne
La précision moyenne (Mean Average Precision) (mAP) est une façon de mesurer la performance d'un modèle de détection d'objets. Elle examine la précision de la détection de chaque classe d'objet, calcule la moyenne de ces scores et donne un chiffre global qui indique avec quelle précision le modèle peut identifier et classifier les objets.
Concentrons-nous sur deux métriques mAP spécifiques :
- mAP@.5: Mesure la précision moyenne à un seul seuil d'IoU (Intersection over Union) de 0,5. Cette métrique vérifie si le modèle peut correctement trouver des objets avec une exigence de précision plus souple. Elle se concentre sur le fait que l'objet soit à peu près au bon endroit, sans nécessiter un placement parfait. Elle permet de voir si le modèle est généralement bon pour repérer les objets.
- mAP@.5:.95: Fait la moyenne des valeurs de mAP calculées à plusieurs seuils d'IoU, de 0,5 à 0,95 par incréments de 0,05. Cette métrique est plus détaillée et stricte. Elle donne une image plus complète de la précision avec laquelle le modèle peut trouver des objets à différents niveaux de rigueur et est particulièrement utile pour les applications qui nécessitent une détection d'objets précise.
Les autres métriques de mAP incluent mAP@0.75, qui utilise un seuil d'IoU plus strict de 0.75, et mAP@small, medium et large, qui évaluent la précision sur des objets de différentes tailles.
Évaluation des performances du modèle YOLO26
Concernant YOLO26, vous pouvez utiliser le mode validation pour évaluer le modèle. Assurez-vous également de consulter notre guide qui explore en profondeur les métriques de performance de YOLO26 et comment elles peuvent être interprétées.
Questions fréquentes de la communauté
Lors de l'évaluation de votre modèle YOLO26, vous pourriez rencontrer quelques difficultés. Basé sur les questions fréquentes de la communauté, voici quelques conseils pour tirer le meilleur parti de votre modèle YOLO26 :
Gestion des tailles d'image variables
Évaluer votre modèle YOLO26 avec des images de différentes tailles peut vous aider à comprendre ses performances sur des jeux de données variés. En utilisant le rect=true paramètre validation, YOLO26 ajuste le pas du réseau pour chaque lot en fonction des tailles d'image, permettant au modèle de gérer les images rectangulaires sans les forcer à une taille unique.
L'argument imgsz Le paramètre de validation définit la dimension maximale pour le redimensionnement de l'image, qui est de 640 par défaut. Vous pouvez l'ajuster en fonction des dimensions maximales de votre jeu de données et de la mémoire GPU disponible. Même avec imgsz définir, rect=true Permet au modèle de gérer efficacement les différentes tailles d'image en ajustant dynamiquement le pas.
Accéder aux métriques YOLO26
Si vous souhaitez approfondir votre compréhension des performances de votre modèle YOLO26, vous pouvez facilement accéder à des métriques d'évaluation spécifiques avec quelques lignes de code python. L'extrait de code ci-dessous vous permettra de charger votre modèle, d'exécuter une évaluation et d'afficher diverses métriques qui montrent les performances de votre modèle.
Utilisation
from ultralytics import YOLO
# Load the model
model = YOLO("yolo26n.pt")
# Run the evaluation
results = model.val(data="coco8.yaml")
# Print specific metrics
print("Class indices with average precision:", results.ap_class_index)
print("Average precision for all classes:", results.box.all_ap)
print("Average precision:", results.box.ap)
print("Average precision at IoU=0.50:", results.box.ap50)
print("Class indices for average precision:", results.box.ap_class_index)
print("Class-specific results:", results.box.class_result)
print("F1 score:", results.box.f1)
print("F1 score curve:", results.box.f1_curve)
print("Overall fitness score:", results.box.fitness)
print("Mean average precision:", results.box.map)
print("Mean average precision at IoU=0.50:", results.box.map50)
print("Mean average precision at IoU=0.75:", results.box.map75)
print("Mean average precision for different IoU thresholds:", results.box.maps)
print("Mean results for different metrics:", results.box.mean_results)
print("Mean precision:", results.box.mp)
print("Mean recall:", results.box.mr)
print("Per-image metrics:", results.box.image_metrics)
print("Precision:", results.box.p)
print("Precision curve:", results.box.p_curve)
print("Precision values:", results.box.prec_values)
print("Specific precision metrics:", results.box.px)
print("Recall:", results.box.r)
print("Recall curve:", results.box.r_curve)
L'objet « résultats » comprend également image_metrics, un dictionnaire par image dont les entrées sont les noms de fichiers d'image avec precision,
recall, f1, tp, fp, et fn, ainsi que des indicateurs de performance tels que le temps de prétraitement, le temps d'inférence, la perte et
le temps de post-traitement. En analysant ces indicateurs, vous pouvez affiner et optimiser votre modèle YOLO26 pour améliorer ses performances,
ce qui le rendra plus efficace pour votre cas d'utilisation spécifique.
Comment fonctionne le réglage fin ?
Le réglage fin consiste à prendre un modèle pré-entraîné et à ajuster ses paramètres pour améliorer les performances sur une tâche ou un jeu de données spécifique. Ce processus, également appelé réentraînement de modèle, permet au modèle de mieux comprendre et prédire les résultats pour les données spécifiques qu'il rencontrera dans les applications du monde réel. Vous pouvez réentraîner votre modèle en fonction de son évaluation pour obtenir des résultats optimaux.
Conseils pour l'ajustement fin de votre modèle
L'affinage d'un modèle signifie qu'il faut accorder une attention particulière à plusieurs paramètres et techniques essentiels pour obtenir des performances optimales. Voici quelques conseils essentiels pour vous guider tout au long du processus.
Commencer avec un taux d'apprentissage plus élevé
Habituellement, pendant les epochs d'entraînement initial, le taux d'apprentissage commence bas et augmente progressivement pour stabiliser le processus d'entraînement. Cependant, étant donné que votre modèle a déjà appris certaines caractéristiques de l'ensemble de données précédent, il peut être plus avantageux de commencer immédiatement avec un taux d'apprentissage plus élevé.
Lors de l'évaluation de votre modèle YOLO26, vous pouvez définir le warmup_epochs paramètre de validation à warmup_epochs=0 pour éviter que le taux d'apprentissage ne commence trop bas. En suivant ce processus, l'entraînement se poursuivra à partir des poids fournis, en s'adaptant aux nuances de vos nouvelles données.
Tiling d'images pour les petits objets
Le tuilage d'images peut améliorer la précision de la détection pour les petits objets. En divisant des images plus grandes en segments plus petits, comme la division d'images 1280x1280 en plusieurs segments 640x640, vous maintenez la résolution originale, et le modèle peut apprendre à partir de fragments haute résolution. Lorsque vous utilisez YOLO26, assurez-vous d'ajuster correctement vos étiquettes pour ces nouveaux segments.
Interagir avec la communauté
Partager vos idées et vos questions avec d'autres passionnés de vision par ordinateur peut inspirer des solutions créatives aux blocages de vos projets. Voici d'excellents moyens d'apprendre, de dépanner et de se connecter.
Trouver de l'aide et de l'assistance
- Problèmes GitHub : Explorez le dépôt GitHub de YOLO26 et utilisez l'onglet Issues pour poser des questions, signaler des bugs et suggérer des fonctionnalités. La communauté et les mainteneurs sont disponibles pour vous aider avec tout problème que vous rencontrez.
- Serveur Discord Ultralytics : Rejoignez le serveur Discord Ultralytics pour vous connecter avec d'autres utilisateurs et développeurs, obtenir de l'aide, partager des connaissances et échanger des idées.
Documentation officielle
- Documentation Ultralytics YOLO26 : Consultez la documentation officielle de YOLO26 pour des guides complets et des informations précieuses sur diverses tâches et projets de vision par ordinateur.
Dernières réflexions
L'évaluation et le réglage fin de votre modèle de vision par ordinateur sont des étapes importantes pour une déploiement de modèle réussi. Ces étapes permettent de s'assurer que votre modèle est précis, efficace et adapté à votre application globale. La clé pour former le meilleur modèle possible est l'expérimentation et l'apprentissage continus. N'hésitez pas à modifier les paramètres, à essayer de nouvelles techniques et à explorer différents ensembles de données. Continuez à expérimenter et à repousser les limites du possible !
FAQ
Quelles sont les métriques clés pour évaluer les performances d'un modèle YOLO26 ?
Pour évaluer les performances d'un modèle YOLO26, les métriques importantes incluent le score de confiance, l'Intersection sur Union (IoU) et la Précision Moyenne (mAP). Le score de confiance mesure la certitude du modèle pour chaque classe d'objet detectée. L'IoU évalue le degré de chevauchement entre la boîte englobante prédite et la vérité terrain. La Précision Moyenne (mAP) agrège les scores de précision sur toutes les classes, avec mAP@.5 et mAP@.5:.95 comme deux types courants pour différents seuils d'IoU. Apprenez-en davantage sur ces métriques dans notre guide des métriques de performance YOLO26.
Comment puis-je affiner un modèle YOLO26 pré-entraîné pour mon jeu de données spécifique ?
Le réglage fin d'un modèle YOLO26 pré-entraîné implique l'ajustement de ses paramètres pour améliorer ses performances sur une tâche ou un jeu de données spécifique. Commencez par évaluer votre modèle à l'aide de métriques, puis définissez un taux d'apprentissage initial plus élevé en ajustant le warmup_epochs paramètre à 0 pour une stabilité immédiate. Utilisez des paramètres comme rect=true pour gérer efficacement les différentes tailles d'image. Pour des conseils plus détaillés, consultez notre section sur réglage fin des modèles YOLO26.
Comment puis-je gérer les tailles d'image variables lors de l'évaluation de mon modèle YOLO26 ?
Pour gérer les tailles d'image variables pendant l'évaluation, utilisez le rect=true paramètre dans YOLO26, qui ajuste le pas du réseau pour chaque lot en fonction de la taille des images. Le imgsz Le paramètre définit la dimension maximale pour le redimensionnement de l'image, par défaut à 640. Ajustez le imgsz en fonction de votre ensemble de données et de la mémoire de votre GPU. Pour plus de détails, consultez notre section sur la gestion des tailles d'image variables.
Quelles étapes pratiques puis-je suivre pour améliorer la précision moyenne (mAP) de mon modèle YOLO26 ?
L'amélioration de la précision moyenne (mAP) pour un modèle YOLO26 implique plusieurs étapes :
- Réglage des hyperparamètres: Expérimentez avec différents taux d’apprentissage, tailles de lots et augmentations d’images.
- Augmentation des données : Utilisez des techniques comme Mosaic et MixUp pour créer divers échantillons d’apprentissage.
- Mise en Tuiles d'Images : Divisez les grandes images en tuiles plus petites pour améliorer la précision de la détection des petits objets. Consultez notre guide détaillé sur le réglage fin du modèle pour connaître les stratégies spécifiques.
Comment accéder aux métriques d'évaluation du modèle YOLO26 en python ?
Vous pouvez accéder aux métriques d'évaluation du modèle YOLO26 en utilisant Python avec les étapes suivantes :
Utilisation
from ultralytics import YOLO
# Load the model
model = YOLO("yolo26n.pt")
# Run the evaluation
results = model.val(data="coco8.yaml")
# Print specific metrics
print("Class indices with average precision:", results.ap_class_index)
print("Average precision for all classes:", results.box.all_ap)
print("Mean average precision at IoU=0.50:", results.box.map50)
print("Mean recall:", results.box.mr)
L'analyse de ces métriques aide à affiner et à optimiser votre modèle YOLO26. Pour une exploration plus approfondie, consultez notre guide sur les métriques YOLO26.






