YOLOv10 : Détection d'objets de bout en bout en temps réel
YOLOv10, publié en mai 2024 et construit sur le package Python Ultralytics par des chercheurs de l'Université Tsinghua, introduit une nouvelle approche de la détection d'objets en temps réel, abordant à la fois les lacunes de post-traitement et d'architecture de modèle trouvées dans les versions précédentes de YOLO. En éliminant la suppression non-maximale (NMS) et en optimisant divers composants du modèle, YOLOv10 a atteint d'excellentes performances avec une surcharge computationnelle significativement réduite au moment de sa sortie. Sa conception de bout en bout sans NMS a été le pionnier d'une approche qui a été développée davantage dans YOLO26.
Regarder : Comment entraîner YOLOv10 sur l'ensemble de données SKU-110k en utilisant Ultralytics | Ensemble de données de vente au détail
Aperçu
La détection d'objets en temps réel vise à prédire avec précision les catégories d'objets et leurs positions dans les images avec une faible latence. La série YOLO est à l'avant-garde de cette recherche en raison de son équilibre entre performance et efficacité. Cependant, la dépendance à l'égard du NMS et les inefficacités architecturales ont entravé des performances optimales. YOLOv10 résout ces problèmes en introduisant des affectations doubles cohérentes pour l'entraînement sans NMS et une stratégie de conception de modèle holistique axée sur l'efficacité et la précision.
Architecture
L'architecture de YOLOv10 s'appuie sur les points forts des modèles YOLO précédents tout en introduisant plusieurs innovations clés. L'architecture du modèle se compose des composants suivants :
- Backbone : Responsable de l’extraction des caractéristiques, le backbone dans YOLOv10 utilise une version améliorée de CSPNet (Cross Stage Partial Network) pour améliorer le flux de gradient et réduire la redondance de calcul.
- Cou : Le cou est conçu pour agréger les caractéristiques de différentes échelles et les transmettre à la tête. Il comprend des couches PAN (Path Aggregation Network) pour une fusion efficace des caractéristiques multi-échelles.
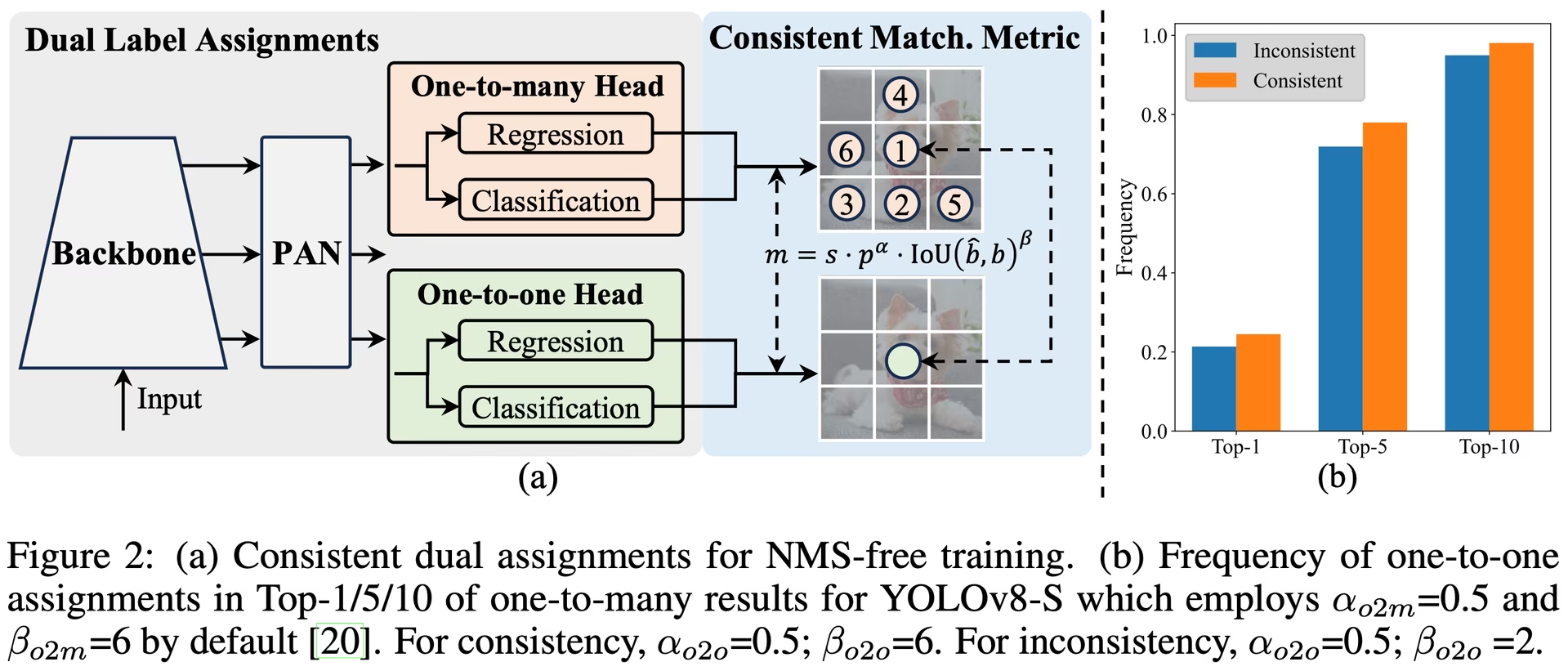
- Tête Un-vers-Plusieurs : Génère plusieurs prédictions par objet pendant l'entraînement pour fournir des signaux de supervision riches et améliorer la précision de l'apprentissage.
- Head One-to-One : Génère une seule meilleure prédiction par objet pendant l’inférence pour éliminer le besoin de NMS, réduisant ainsi la latence et améliorant l’efficacité.
Principales caractéristiques
- Entraînement sans NMS : Utilise des affectations doubles cohérentes pour éliminer le besoin de NMS, réduisant ainsi la latence d'inférence.
- Conception Holistique du Modèle : Optimisation complète de divers composants du point de vue de l'efficacité et de la précision, y compris les têtes de classification légères, le sous-échantillonnage spatial-canal découplé et la conception de blocs guidée par le rang.
- Capacités de modèle améliorées : Intègre des convolutions à grand noyau et des modules d'auto-attention partielle pour améliorer les performances sans coût de calcul significatif.
Variantes de modèles
YOLOv10 est disponible en différentes échelles de modèle pour répondre aux différents besoins des applications :
- YOLOv10n : Version nano pour les environnements extrêmement limités en ressources.
- YOLOv10s : Petite version équilibrant la vitesse et la précision.
- YOLOv10m : Version moyenne pour une utilisation polyvalente.
- YOLOv10b : Version équilibrée avec une largeur accrue pour une plus grande précision.
- YOLOv10l : Version large pour une plus grande précision au prix de ressources de calcul accrues.
- YOLOv10x : Version extra-large pour une précision et des performances maximales.
Performance
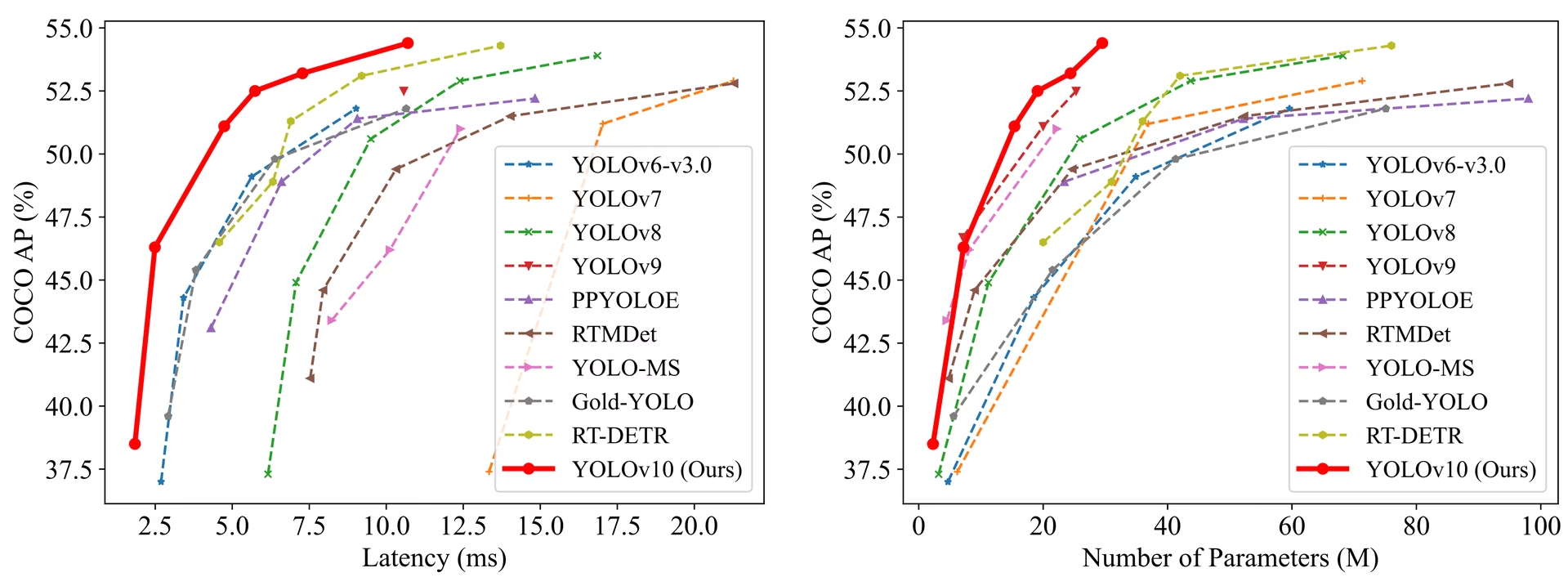
YOLOv10 surpasse les versions précédentes de YOLO et d'autres modèles de pointe en termes de précision et d'efficacité. Par exemple, YOLOv10s est 1,8 fois plus rapide que RT-DETR-R18 avec un AP similaire sur l'ensemble de données COCO, et YOLOv10b a une latence inférieure de 46 % et 25 % de paramètres en moins que YOLOv9-C avec les mêmes performances.
Performance
Latence mesurée avec TensorRT FP16 sur GPU T4.
| Modèle | Taille d'entrée | APval | FLOPs (G) | Latence (ms) |
|---|---|---|---|---|
| YOLOv10n | 640 | 38.5 | 6.7 | 1.84 |
| YOLOv10s | 640 | 46.3 | 21.6 | 2.49 |
| YOLOv10m | 640 | 51.1 | 59.1 | 4.74 |
| YOLOv10b | 640 | 52.5 | 92.0 | 5.74 |
| YOLOv10l | 640 | 53.2 | 120.3 | 7.28 |
| YOLOv10x | 640 | 54.4 | 160.4 | 10.70 |
Méthodologie
Attributions doubles cohérentes pour l'entraînement sans NMS
YOLOv10 utilise des affectations d'étiquettes doubles, combinant des stratégies un-à-plusieurs et un-à-un pendant l'entraînement pour assurer une supervision riche et un déploiement de bout en bout efficace. La métrique de correspondance cohérente aligne la supervision entre les deux stratégies, améliorant ainsi la qualité des prédictions pendant l'inférence.
Conception de modèle axée sur l'efficacité holistique et la précision
Améliorations de l'Efficacité
- Tête de classification légère : Réduit la surcharge de calcul de la tête de classification en utilisant des convolutions séparables en profondeur.
- Sous-échantillonnage spatial-canal découplé : Découple la réduction spatiale et la modulation de canal pour minimiser la perte d'informations et le coût de calcul.
- Conception de bloc guidée par le rang : Adapte la conception du bloc en fonction de la redondance intrinsèque de l'étape, garantissant une utilisation optimale des paramètres.
Améliorations de la Précision
- Convolution à grand noyau: Agrandit le champ réceptif pour améliorer la capacité d'extraction des caractéristiques.
- Auto-attention partielle (PSA) : Incorpore des modules d'auto-attention pour améliorer l'apprentissage de la représentation globale avec une surcharge minimale.
Expériences et Résultats
YOLOv10 a été testé de manière approfondie sur des benchmarks standard comme COCO, démontrant des performances et une efficacité supérieures. Le modèle obtient des résultats de pointe dans différentes variantes, présentant des améliorations significatives en termes de latence et de précision par rapport aux versions précédentes et aux autres détecteurs contemporains.
Comparaisons
Comparaison avec d'autres détecteurs de pointe :
- YOLOv10s / x sont 1,8× / 1,3× plus rapides que RT-DETR-R18 / R101 avec une précision similaire
- YOLOv10b a 25 % de paramètres en moins et une latence inférieure de 46 % à celle de YOLOv9-C avec la même précision
- YOLOv10l / x surpasse YOLOv8l / x de 0,3 AP / 0,5 AP avec 1,8 × / 2,3 × moins de paramètres
Performance
Voici une comparaison détaillée des variantes de YOLOv10 avec d'autres modèles de pointe :
| Modèle | Paramètres (M) | FLOPs (G) | mAPval 50-95 | Latence (ms) | Latence-forward (ms) |
|---|---|---|---|---|---|
| YOLOv6-3.0-N | 4.7 | 11.4 | 37.0 | 2.69 | 1.76 |
| Gold-YOLO-N | 5.6 | 12.1 | 39.6 | 2.92 | 1.82 |
| YOLOv8n | 3.2 | 8.7 | 37.3 | 6.16 | 1.77 |
| YOLOv10n | 2.3 | 6.7 | 39.5 | 1.84 | 1.79 |
| YOLOv6-3.0-S | 18.5 | 45.3 | 44.3 | 3.42 | 2.35 |
| Gold-YOLO-S | 21.5 | 46.0 | 45.4 | 3.82 | 2.73 |
| YOLOv8s | 11.2 | 28.6 | 44.9 | 7.07 | 2.33 |
| YOLOv10s | 7.2 | 21.6 | 46.8 | 2.49 | 2.39 |
| RT-DETR-R18 | 20.0 | 60.0 | 46.5 | 4.58 | 4.49 |
| YOLOv6-3.0-M | 34.9 | 85.8 | 49.1 | 5.63 | 4.56 |
| Gold-YOLO-M | 41.3 | 87.5 | 49.8 | 6.38 | 5.45 |
| YOLOv8m | 25.9 | 78.9 | 50.6 | 9.50 | 5.09 |
| YOLOv10m | 15.4 | 59.1 | 51.3 | 4.74 | 4.63 |
| YOLOv6-3.0-L | 59.6 | 150.7 | 51.8 | 9.02 | 7.90 |
| Gold-YOLO-L | 75.1 | 151.7 | 51.8 | 10.65 | 9.78 |
| YOLOv8l | 43.7 | 165.2 | 52.9 | 12.39 | 8.06 |
| RT-DETR-R50 | 42.0 | 136.0 | 53.1 | 9.20 | 9.07 |
| YOLOv10l | 24.4 | 120.3 | 53.4 | 7.28 | 7.21 |
| YOLOv8x | 68.2 | 257.8 | 53.9 | 16.86 | 12.83 |
| RT-DETR-R101 | 76.0 | 259.0 | 54.3 | 13.71 | 13.58 |
| YOLOv10x | 29.5 | 160.4 | 54.4 | 10.70 | 10.60 |
Les valeurs des paramètres et des FLOP sont celles du modèle fusionné après model.fuse(), qui fusionne les couches Conv et BatchNorm et supprime la tête de détection auxiliaire un-à-plusieurs. Les points de contrôle pré-entraînés conservent l'architecture d'entraînement complète et peuvent afficher des nombres plus élevés.
Exemples d'utilisation
Pour prédire de nouvelles images avec YOLOv10. Les modèles peuvent également être entraînés sur des GPU en cloud via Ultralytics :
Exemple
from ultralytics import YOLO
# Load a pretrained YOLOv10n model
model = YOLO("yolov10n.pt")
# Perform object detection on an image
results = model("image.jpg")
# Display the results
results[0].show()
# Load a COCO-pretrained YOLOv10n model and run inference on the 'bus.jpg' image
yolo detect predict model=yolov10n.pt source=path/to/bus.jpg
Pour l'entraînement de YOLOv10 sur un jeu de données personnalisé:
Exemple
from ultralytics import YOLO
# Load YOLOv10n model from scratch
model = YOLO("yolov10n.yaml")
# Train the model
model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Build a YOLOv10n model from scratch and train it on the COCO8 example dataset for 100 epochs
yolo train model=yolov10n.yaml data=coco8.yaml epochs=100 imgsz=640
# Build a YOLOv10n model from scratch and run inference on the 'bus.jpg' image
yolo predict model=yolov10n.yaml source=path/to/bus.jpg
Tâches et modes pris en charge
La série de modèles YOLOv10 offre une gamme de modèles, chacun étant optimisé pour la détection d'objets à haute performance. Ces modèles répondent à des besoins de calcul et à des exigences de précision variables, ce qui les rend polyvalents pour un large éventail d'applications.
| Modèle | Noms de fichiers | Tâches | Inférence | Validation | Entraînement | Exporter |
|---|---|---|---|---|---|---|
| YOLOv10 | yolov10n.pt yolov10s.pt yolov10m.pt yolov10l.pt yolov10x.pt | Détection d'objets | ✅ | ✅ | ✅ | ✅ |
Exporter YOLOv10
En raison des nouvelles opérations introduites avec YOLOv10, tous les formats d'exportation fournis par Ultralytics ne sont pas pris en charge actuellement. Le tableau suivant indique les formats qui ont été convertis avec succès à l'aide d'Ultralytics pour YOLOv10. N'hésitez pas à ouvrir une pull request si vous êtes en mesure de fournir une modification de contribution pour ajouter la prise en charge de l'exportation de formats supplémentaires pour YOLOv10.
| Format d'exportation | Prise en charge de l'exportation | Inférence du modèle exporté | Remarques |
|---|---|---|---|
| TorchScript | ✅ | ✅ | Format de modèle PyTorch standard. |
| ONNX | ✅ | ✅ | Largement pris en charge pour le déploiement. |
| OpenVINO | ✅ | ✅ | Optimisé pour le matériel Intel. |
| TensorRT | ✅ | ✅ | Optimisé pour les GPU NVIDIA. |
| CoreML | ✅ | ✅ | Limité aux appareils Apple. |
| TF SavedModel | ✅ | ✅ | Format de modèle standard de TensorFlow. |
| TF GraphDef | ✅ | ✅ | Format TensorFlow hérité. |
| TF Lite | ✅ | ✅ | Optimisé pour les appareils mobiles et embarqués. |
| TF Edge TPU | ✅ | ✅ | Spécifique aux appareils Edge TPU de Google. |
| TF.js | ✅ | ✅ | Environnement JavaScript pour une utilisation dans un navigateur. |
| PaddlePaddle | ❌ | ❌ | Populaire en Chine ; moins de support global. |
| NCNN | ✅ | ❌ | Couche torch.topk n'existe pas ou n'est pas enregistré |
Conclusion
YOLOv10 a établi une nouvelle norme en matière de détection d'objets en temps réel lors de sa sortie, en corrigeant les lacunes des versions précédentes de YOLO et en intégrant des stratégies de conception innovantes. Son approche sans NMS a été pionnière dans la détection d'objets de bout en bout au sein de la famille YOLO. Pour le dernier modèle Ultralytics offrant des performances améliorées et une inférence sans NMS, consultez YOLO26.
Citations et remerciements
Nous tenons à remercier les auteurs de YOLOv10 de l'Université Tsinghua pour leurs recherches approfondies et leurs contributions significatives au framework Ultralytics :
@article{THU-MIGyolov10,
title={YOLOv10: Real-Time End-to-End Object Detection},
author={Ao Wang, Hui Chen, Lihao Liu, et al.},
journal={arXiv preprint arXiv:2405.14458},
year={2024},
institution={Tsinghua University},
license = {AGPL-3.0}
}
Pour une implémentation détaillée, les innovations architecturales et les résultats expérimentaux, veuillez consulter le document de recherche et le répertoire GitHub de YOLOv10 par l'équipe de l'université de Tsinghua.
FAQ
Qu'est-ce que YOLOv10 et en quoi diffère-t-il des versions précédentes de YOLO ?
YOLOv10, développé par des chercheurs de l’université de Tsinghua, introduit plusieurs innovations clés dans la détection d’objets en temps réel. Il élimine le besoin de suppression non maximale (NMS) en employant des affectations doubles cohérentes pendant la formation et des composants de modèle optimisés pour des performances supérieures avec une surcharge de calcul réduite. Pour plus de détails sur son architecture et ses principales caractéristiques, consultez la section Aperçu de YOLOv10.
Comment puis-je commencer à exécuter l'inférence à l'aide de YOLOv10 ?
Pour une inférence facile, vous pouvez utiliser la bibliothèque Ultralytics YOLO python ou l'interface de ligne de commande (CLI). Vous trouverez ci-dessous des exemples de prédiction de nouvelles images à l'aide de YOLOv10 :
Exemple
from ultralytics import YOLO
# Load the pretrained YOLOv10n model
model = YOLO("yolov10n.pt")
results = model("image.jpg")
results[0].show()
yolo detect predict model=yolov10n.pt source=path/to/image.jpg
Pour plus d'exemples d'utilisation, consultez notre section Exemples d'utilisation.
Quelles variantes de modèles YOLOv10 propose YOLOv10 et quels sont leurs cas d'utilisation ?
YOLOv10 offre plusieurs variantes de modèles pour répondre à différents cas d'utilisation :
- YOLOv10n : Convient aux environnements extrêmement limités en ressources
- YOLOv10s : Équilibre la vitesse et la précision
- YOLOv10m : Utilisation polyvalente
- YOLOv10b : Précision supérieure grâce à une largeur accrue
- YOLOv10l : Haute précision au prix de ressources de calcul
- YOLOv10x : Précision et performances maximales
Chaque variante est conçue pour différents besoins de calcul et exigences de précision, ce qui les rend polyvalentes pour une variété d'applications. Explorez la section Variantes de modèle pour plus d'informations.
Comment l'approche sans NMS dans YOLOv10 améliore-t-elle les performances ?
YOLOv10 élimine le besoin de suppression non maximale (NMS) pendant l'inférence en utilisant des affectations doubles cohérentes pour l'entraînement. Cette approche réduit la latence d'inférence et améliore l'efficacité de la prédiction. L'architecture comprend également une tête individuelle pour l'inférence, garantissant que chaque objet reçoit une seule meilleure prédiction. Pour une explication détaillée, consultez la section Affectations doubles cohérentes pour l'entraînement sans NMS.
Où puis-je trouver les options d'exportation pour les modèles YOLOv10 ?
YOLOv10 prend en charge plusieurs formats d'exportation, notamment TorchScript, ONNX, OpenVINO et TensorRT. Cependant, tous les formats d'exportation fournis par Ultralytics ne sont pas actuellement pris en charge pour YOLOv10 en raison de ses nouvelles opérations. Pour plus de détails sur les formats pris en charge et les instructions d'exportation, consultez la section Exportation de YOLOv10.
Quels sont les bancs d'essai de performance pour les modèles YOLOv10 ?
YOLOv10 surpasse les versions précédentes de YOLO et d'autres modèles de pointe en termes de précision et d'efficacité. Par exemple, YOLOv10s est 1,8 fois plus rapide que RT-DETR-R18 avec un AP similaire sur l'ensemble de données COCO. YOLOv10b affiche une latence inférieure de 46 % et 25 % de paramètres en moins que YOLOv9-C avec les mêmes performances. Des benchmarks détaillés sont disponibles dans la section Comparaisons.












