Link to this sectionSolutions Ultralytics : exploite YOLO26 pour résoudre des problèmes du monde réel#
Les Solutions Ultralytics proposent des applications de pointe basées sur les modèles YOLO, offrant des solutions concrètes telles que le comptage d'objets, le floutage et les systèmes de sécurité, tout en améliorant l'efficacité et la précision dans divers secteurs. Découvre la puissance de YOLO26 pour des implémentations pratiques et efficaces.
Watch: How to Run Ultralytics Solutions from the Command Line (CLI) | Ultralytics YOLO26 🚀
Link to this sectionSolutions#
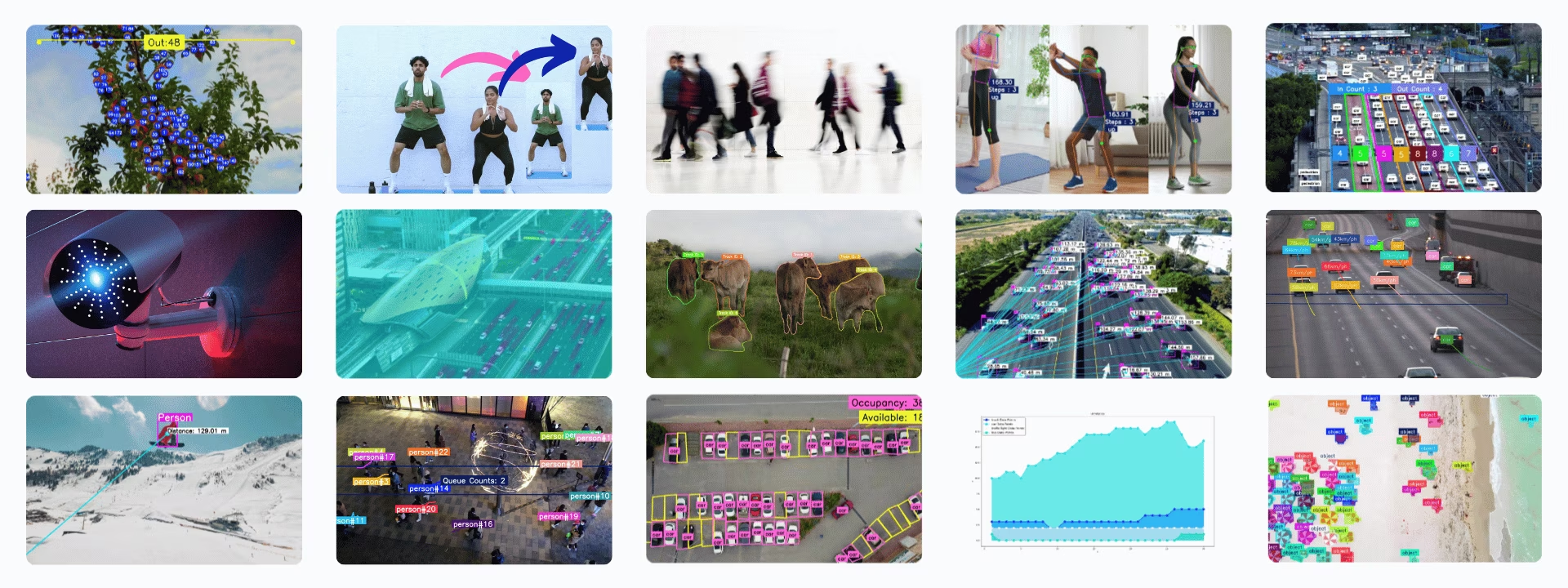
Voici notre liste organisée de solutions Ultralytics que tu peux utiliser pour créer de superbes projets de vision par ordinateur.
- Analytique : Effectue une analyse de données complète pour découvrir des tendances et prendre des décisions éclairées, en exploitant YOLO26 pour des analyses descriptives, prédictives et prescriptives.
- Calcul de distance : Calcule les distances entre des objets en utilisant les centroïdes des boîtes englobantes dans YOLO26, essentiel pour l'analyse spatiale.
- Cartes de chaleur : Utilise des cartes de chaleur de détection pour visualiser l'intensité des données à travers une matrice, offrant des perspectives claires dans les tâches de vision par ordinateur.
- Segmentation d'instance avec suivi d'objet : Implémente la segmentation d'instance et le suivi d'objets avec YOLO26 pour obtenir des contours d'objets précis et une surveillance continue.
- Inférence en direct avec Streamlit : Exploite la puissance de YOLO26 pour la détection d'objets en temps réel directement via ton navigateur web grâce à une interface Streamlit conviviale.
- Floutage d'objet : Applique le floutage d'objet via YOLO26 pour protéger la confidentialité lors du traitement d'images et de vidéos.
- Comptage d'objets : Apprends à effectuer un comptage d'objets en temps réel avec YOLO26. Acquiers l'expertise pour compter précisément des objets dans des flux vidéo en direct.
- Comptage d'objets dans des régions : Compte des objets dans des régions spécifiques en utilisant YOLO26 pour une détection précise dans des zones variées.
- Recadrage d'objet : Maîtrise le recadrage d'objet avec YOLO26 pour une extraction précise d'objets à partir d'images et de vidéos.
- Gestion de stationnement : Organise et dirige le flux de véhicules dans les zones de stationnement avec YOLO26, en optimisant l'utilisation de l'espace et l'expérience utilisateur.
- Gestion de file d'attente : Implémente des systèmes de gestion de file d'attente efficaces pour minimiser les temps d'attente et améliorer la productivité en utilisant YOLO26.
- Système d'alarme de sécurité : Crée un système d'alarme de sécurité avec YOLO26 qui déclenche des alertes lors de la détection de nouveaux objets. Personnalise le système selon tes besoins spécifiques.
- Similarity Search : active la recherche d'images intelligente en combinant les embeddings d'OpenAI CLIP avec une recherche de similarité cosinus, ce qui permet des requêtes en langage naturel comme "person holding a bag" ou "vehicles in motion."
- Estimation de vitesse : Estime la vitesse d'un objet en utilisant YOLO26 et des techniques de suivi d'objets, crucial pour des applications comme les véhicules autonomes et la surveillance du trafic.
- Suivi d'objets dans une zone : Apprends à suivre des objets dans des zones spécifiques de trames vidéo en utilisant YOLO26 pour une surveillance précise et efficace.
- VisionEye : cartographie des objets vus : Développe des systèmes qui imitent la focalisation de l'œil humain sur des objets spécifiques, améliorant la capacité de l'ordinateur à discerner et hiérarchiser les détails.
- Suivi d'exercices physiques : Découvre comment suivre des exercices physiques en utilisant YOLO26. Apprends à surveiller et analyser diverses routines de fitness en temps réel.
Link to this sectionArguments des Solutions#
| Argument | Type | Défaut | Description |
|---|---|---|---|
model | str | None | Chemin d'accès vers un fichier de modèle YOLO d'Ultralytics. |
region | list ou dict | None | Points définissant la région d'intérêt, soit une liste de tuples (x, y), soit un dictionnaire associant des noms de régions à des listes de points pour plusieurs régions (RegionCounter uniquement). Lorsque la valeur est None, les solutions nécessitant une région utilisent une valeur par défaut prédéfinie. |
show_in | bool | True | Indicateur pour contrôler s'il faut afficher les comptages entrants sur le flux vidéo. |
show_out | bool | True | Indicateur pour contrôler s'il faut afficher les comptages sortants sur le flux vidéo. |
analytics_type | str | 'line' | Type de graphique, par ex. line, bar, area ou pie. |
colormap | int | cv2.COLORMAP_DEEPGREEN | Palette de couleurs à utiliser pour la carte de chaleur. |
json_file | str | None | Chemin d'accès au fichier JSON qui contient toutes les données de coordonnées de stationnement. |
up_angle | float | 145.0 | Seuil d'angle pour la posture 'vers le haut'. |
kpts | list[int] | '[6, 8, 10]' | Liste de trois indices de points clés utilisés pour surveiller les exercices physiques. Ces points clés correspondent aux articulations ou parties du corps, comme les épaules, les coudes et les poignets, pour des exercices tels que les pompes, les tractions, les squats et les abdominaux. |
down_angle | int | 90 | Seuil d'angle pour la posture 'vers le bas'. |
blur_ratio | float | 0.5 | Ajuste le pourcentage d'intensité du flou, avec des valeurs dans la plage 0.1 - 1.0. |
crop_dir | str | 'cropped-detections' | Nom du répertoire pour stocker les détections recadrées. |
records | int | 5 | Nombre total de détections pour déclencher un e-mail avec le système d'alarme de sécurité. |
vision_point | tuple[int, int] | (20, 20) | Le point où la vision suivra les objets et dessinera des chemins en utilisant la Solution VisionEye. |
source | str | None | Chemin vers la source d'entrée (vidéo, RTSP, etc.). Utilisable uniquement avec l'interface de ligne de commande (CLI) des Solutions. |
figsize | tuple[float, float] | (12.8, 7.2) | Taille de figure pour les graphiques analytiques tels que les cartes de chaleur ou les graphiques. |
fps | float | 30.0 | Images par seconde utilisées pour les calculs de vitesse. |
max_hist | int | 5 | Points historiques maximum à suivre par objet pour les calculs de vitesse/direction. |
meter_per_pixel | float | 0.05 | Facteur d'échelle utilisé pour convertir la distance en pixels en unités du monde réel. |
max_speed | int | 120 | Limite de vitesse maximale dans les superpositions visuelles (utilisée dans les alertes). |
data | str | 'images' | Chemin vers le répertoire d'images utilisé pour la recherche de similarité. |
imgsz | int | 640 | Taille de l'image d'entrée pour l'inférence du modèle. |
Les Solutions prennent également en charge certains arguments de track, y compris des paramètres tels que conf, line_width, tracker, model, show, verbose et classes.
| Argument | Type | Défaut | Description |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | Spécifie l'algorithme de suivi à utiliser. Options intégrées : botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | Définit le seuil de confiance pour les détections ; des valeurs plus faibles permettent de suivre plus d'objets, mais peuvent inclure des faux positifs. |
iou | float | 0.7 | Définit le seuil d'Intersection sur Union (IoU) pour filtrer les détections qui se chevauchent. |
classes | list | None | Filtre les résultats par indice de classe. Par exemple, classes=[0, 2, 3] ne suit que les classes spécifiées. |
verbose | bool | True | Contrôle l'affichage des résultats de suivi, en fournissant une sortie visuelle des objets suivis. |
device | str | None | Spécifie le périphérique pour l'inférence (par ex. cpu, cuda:0 ou 0). Permet aux utilisateurs de choisir entre le CPU, un GPU spécifique ou d'autres dispositifs de calcul pour l'exécution du modèle. |
Tu peux utiliser show_conf, show_labels et d'autres arguments mentionnés pour personnaliser la visualisation.
| Argument | Type | Défaut | Description |
|---|---|---|---|
show | bool | False | Si True, affiche les images ou vidéos annotées dans une fenêtre. Utile pour un retour visuel immédiat lors du développement ou des tests. |
line_width | int or None | None | Spécifie l'épaisseur de ligne des boîtes englobantes. Si None, l'épaisseur de ligne est automatiquement ajustée en fonction de la taille de l'image. Offre une personnalisation visuelle pour plus de clarté. |
show_conf | bool | True | Affiche le score de confiance pour chaque détection à côté de l'étiquette. Donne un aperçu de la certitude du modèle pour chaque détection. |
show_labels | bool | True | Affiche les étiquettes pour chaque détection dans la sortie visuelle. Permet une compréhension immédiate des objets détectés. |
Link to this sectionUtilisation de SolutionAnnotator#
Toutes les Ultralytics Solutions utilisent la classe séparée SolutionAnnotator, qui étend la classe principale Annotator, et disposent des méthodes suivantes :
| Méthode | Type de retour | Description |
|---|---|---|
draw_region() | None | Dessine une région en utilisant des points, des couleurs et une épaisseur spécifiés. |
queue_counts_display() | None | Affiche les décomptes de file d'attente dans la région spécifiée. |
display_analytics() | None | Affiche les statistiques globales pour la gestion des parkings. |
estimate_pose_angle() | float | Calcule l'angle entre trois points dans la pose d'un objet. |
draw_specific_kpts() | np.ndarray | Dessine des points clés spécifiques sur l'image. |
plot_workout_information() | int | Dessine une zone de texte étiquetée sur l'image. |
plot_angle_and_count_and_stage() | None | Visualise l'angle, le nombre de répétitions et l'étape pour le suivi de l'entraînement. |
plot_distance_and_line() | None | Affiche la distance entre les centroïdes et les relie par une ligne. |
display_objects_labels() | None | Annote les boîtes englobantes avec des étiquettes de classe d'objet. |
sweep_annotator() | None | Visualise une ligne de balayage verticale et une étiquette optionnelle. |
visioneye() | None | Mappe et connecte les centroïdes d'objets à un point "œil" visuel. |
adaptive_label() | None | Dessine une étiquette d'arrière-plan circulaire ou rectangulaire au centre d'une bounding box. |
Link to this sectionTravailler avec SolutionResults#
À l'exception de Similarity Search, chaque appel de solution renvoie un objet SolutionResults.
- Pour le comptage d'objets, les résultats incluent
in_count,out_countetclasswise_count.
import cv2
from ultralytics import solutions
im0 = cv2.imread("path/to/img")
region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)]
counter = solutions.ObjectCounter(
show=True, # display the output
region=region_points, # pass region points
model="yolo26n.pt", # model="yolo26n-obb.pt" for object counting with OBB model.
# classes=[0, 2], # count specific classes i.e. person and car with COCO pretrained model.
# tracker="botsort.yaml" # Choose trackers i.e "bytetrack.yaml"
)
results = counter(im0)
print(results.in_count) # display in_counts
print(results.out_count) # display out_counts
print(results.classwise_count) # display classwise_countL'objet SolutionResults possède les attributs suivants :
| Attribut | Type | Description |
|---|---|---|
plot_im | np.ndarray | Image avec des superpositions visuelles telles que des décomptes, des effets de flou ou des améliorations spécifiques à la solution. |
in_count | int | Nombre total d'objets détectés entrant dans la zone définie dans le flux vidéo. |
out_count | int | Nombre total d'objets détectés sortant de la zone définie dans le flux vidéo. |
classwise_count | Dict[str, int] | Dictionnaire enregistrant les décomptes d'entrée/sortie d'objets par classe pour des analyses avancées. |
queue_count | int | Nombre d'objets actuellement dans une file d'attente ou une zone d'attente prédéfinie (adapté pour la gestion des files d'attente). |
workout_count | list[int] | Comptages de répétitions d'exercices par suivi depuis AI Gym (une entrée par individu actuellement suivi). |
workout_angle | list[float] | Angles d'exercices par suivi depuis AI Gym (une entrée par individu actuellement suivi). |
workout_stage | list[str] | Étape d'exercice actuelle par suivi depuis AI Gym (une entrée par individu actuellement suivi). |
pixels_distance | float | Distance basée sur les pixels entre deux objets ou points, par ex. des boîtes englobantes. (Adapté pour le calcul de distance). |
available_slots | int | Nombre d'emplacements inoccupés dans une zone surveillée (adapté pour la gestion de parking). |
filled_slots | int | Nombre d'emplacements occupés dans une zone surveillée. (Adapté pour la gestion de parking) |
email_sent | bool | Indique si une notification ou un e-mail d'alerte a été envoyé avec succès (adapté pour une alarme de sécurité). |
total_tracks | int | Nombre total de suivis d'objets uniques observés pendant l'analyse vidéo. |
region_counts | Dict[str, int] | Décomptes d'objets au sein de régions ou zones définies par l'utilisateur. |
speed_dict | Dict[str, float] | Dictionnaire par suivi des vitesses d'objets calculées, utile pour l'analyse de vélocité. |
total_crop_objects | int | Nombre total d'images d'objets recadrées générées par la solution ObjectCropper. |
speed | Dict[str, float] | Dictionnaire contenant des mesures de performance pour le suivi et le traitement de la solution. |
Pour plus de détails, reporte-toi à la documentation de la classe SolutionResults.
Link to this sectionUtilisation des solutions via CLI#
La plupart des solutions peuvent être utilisées directement via l'interface de ligne de commande, y compris :
Count, Crop, Blur, Workout, Heatmap, Isegment, Visioneye, Speed, Queue, Analytics, Inference, Trackzone
Syntaxe
yolo SOLUTIONS SOLUTION_NAME ARGS
- SOLUTIONS est un mot-clé requis.
- SOLUTION_NAME est l'un des suivants :
['count', 'crop', 'blur', 'workout', 'heatmap', 'isegment', 'queue', 'speed', 'analytics', 'trackzone', 'inference', 'visioneye', 'region', 'security', 'parking']. - ARGS (optionnel) sont des paires
arg=valuepersonnalisées, telles queshow_in=True, pour outrepasser les paramètres par défaut.
yolo solutions count show=True # for object counting
yolo solutions count source="path/to/video.mp4" # specify video file pathLink to this sectionContribue à nos solutions#
Nous accueillons les contributions de la communauté ! Si tu maîtrises un aspect particulier de Ultralytics YOLO qui n'est pas encore couvert dans nos solutions, nous t'encourageons à partager ton expertise. Rédiger un guide est un excellent moyen de contribuer à la communauté et de nous aider à rendre notre documentation plus complète et conviviale.
Pour commencer, lis notre Guide de contribution pour obtenir des instructions sur la façon d'ouvrir une Pull Request (PR) 🛠️. Nous attendons tes contributions avec impatience !
Travaillons ensemble pour rendre l'écosystème Ultralytics YOLO plus robuste et polyvalent 🙏 !
Link to this sectionFAQ#
Link to this sectionComment puis-je utiliser Ultralytics YOLO pour le comptage d'objets en temps réel ?#
Ultralytics YOLO26 peut être utilisé pour le comptage d'objets en temps réel en tirant parti de ses capacités avancées de détection d'objets. Tu peux suivre notre guide détaillé sur le Comptage d'objets pour configurer YOLO26 pour l'analyse de flux vidéo en direct. Installe simplement YOLO26, charge ton modèle et traite les images vidéo pour compter les objets dynamiquement.
Link to this sectionQuels sont les avantages d'utiliser Ultralytics YOLO pour les systèmes de sécurité ?#
Ultralytics YOLO26 améliore les systèmes de sécurité en offrant une détection d'objets en temps réel et des mécanismes d'alerte. En employant YOLO26, tu peux créer un système d'alarme de sécurité qui déclenche des alertes lorsque de nouveaux objets sont détectés dans la zone de surveillance. Apprends à configurer un Système d'alarme de sécurité avec YOLO26 pour une surveillance de sécurité robuste.
Link to this sectionComment Ultralytics YOLO peut-il améliorer les systèmes de gestion de files d'attente ?#
Ultralytics YOLO26 peut considérablement améliorer les systèmes de gestion de files d'attente en comptant et en suivant avec précision les personnes dans les files, aidant ainsi à réduire les temps d'attente et à optimiser l'efficacité du service. Suis notre guide détaillé sur la Gestion des files d'attente pour apprendre à implémenter YOLO26 pour une surveillance et une analyse efficaces des files d'attente.
Link to this sectionUltralytics YOLO peut-il être utilisé pour le suivi d'entraînement ?#
Oui, Ultralytics YOLO26 peut être efficacement utilisé pour surveiller les entraînements en suivant et en analysant les routines de fitness en temps réel. Cela permet une évaluation précise de la forme et de la performance de l'exercice. Explore notre guide sur le Suivi des entraînements pour apprendre à configurer un système de suivi d'entraînement assisté par IA utilisant YOLO26.
Link to this sectionComment Ultralytics YOLO aide-t-il à créer des cartes thermiques pour la visualisation de données ?#
Ultralytics YOLO26 peut générer des cartes thermiques pour visualiser l'intensité des données sur une zone donnée, mettant en évidence les régions de haute activité ou d'intérêt. Cette fonctionnalité est particulièrement utile pour comprendre les modèles et les tendances dans diverses tâches de vision par ordinateur. Apprends-en plus sur la création et l'utilisation de Cartes thermiques avec YOLO26 pour une analyse et une visualisation de données complètes.