Link to this sectionUltralytics YOLO26を使用した速度推定 🚀#
Link to this section速度推定とは?#
速度推定は、特定のコンテキスト内におけるオブジェクトの移動速度を計算するプロセスであり、コンピュータビジョンアプリケーションで頻繁に使用されます。Ultralytics YOLO26を使用することで、オブジェクトトラッキングと距離および時間のデータを組み合わせてオブジェクトの速度を計算できるようになりました。これは交通監視や監視業務などのタスクにおいて非常に重要です。速度推定の精度は、さまざまなアプリケーションの効率と信頼性に直結するため、インテリジェントシステムやリアルタイムの意思決定プロセスの進歩における重要なコンポーネントとなっています。
Watch: Speed Estimation using Ultralytics YOLO26
速度推定に関する詳細なインサイトについては、弊社のブログ記事「Ultralytics YOLOによるコンピュータビジョンプロジェクトでの速度推定」をご覧ください。
Link to this section速度推定の利点#
- 効率的な交通制御: 正確な速度推定は、交通流の管理を助け、安全性を高め、道路の渋滞を軽減します。
- 高精度な自律ナビゲーション: 自動運転車のような自律システムにおいて、信頼性の高い速度推定は、安全で正確な車両ナビゲーションを実現します。
- 監視セキュリティの強化: 監視分析における速度推定は、異常な行動や潜在的な脅威を特定し、セキュリティ対策の有効性を向上させるのに役立ちます。
Link to this section現実世界の応用例#
| 交通 | 交通 |
|---|---|
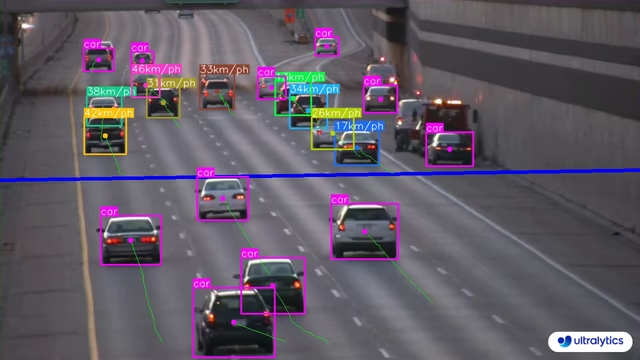 | 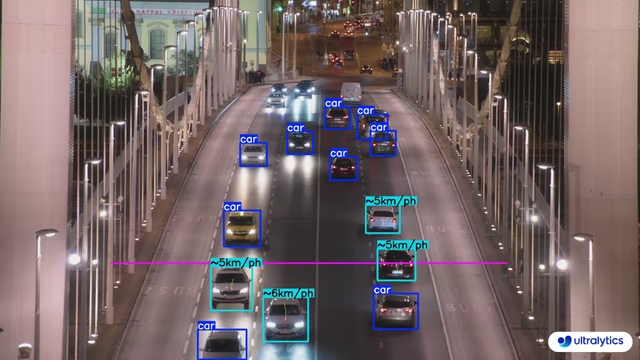 |
| Ultralytics YOLO26を使用した道路上の速度推定 | Ultralytics YOLO26を使用した橋の上での速度推定 |
速度は推定値です
速度は推定値であり、完全に正確ではない場合があります。さらに、推定値はカメラの仕様や関連する要因によって変動する可能性があります。
Link to this sectionYOLO26を使用した速度推定#
SpeedEstimatorソリューションはフレーム間で各オブジェクトを追跡し、ビデオのフレームレート(fps)と実世界のスケール(meter_per_pixel)を使用してピクセル単位の変位を速度に変換します。カメラのセットアップに合わせてmeter_per_pixelを調整し、max_speedを使用してノイズの多い追跡結果から外れ値を除去してください。
# Run a speed example
yolo solutions speed show=True
# Pass a source video
yolo solutions speed source="path/to/video.mp4"
# Adjust meter per pixel value based on camera configuration
yolo solutions speed meter_per_pixel=0.05Link to this sectionSpeedEstimatorの引数#
以下はSpeedEstimatorの引数を示した表です:
| 引数 | タイプ | デフォルト | 説明 |
|---|---|---|---|
model | str | None | Ultralytics YOLOモデルファイルへのパス。 |
fps | float | 30.0 | 速度計算に使用される1秒あたりのフレーム数。 |
max_hist | int | 5 | 速度や方向の計算において、物体ごとに追跡する過去のポイントの最大数。 |
meter_per_pixel | float | 0.05 | ピクセル距離を現実世界の単位に変換するために使用されるスケーリング係数。 |
max_speed | int | 120 | 視覚オーバーレイにおける最高速度制限(アラートで使用)。 |
SpeedEstimatorソリューションでは、以下のtrackパラメータを使用できます:
| 引数 | タイプ | デフォルト | 説明 |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | 使用するトラッキングアルゴリズムを指定します。組み込みのオプションは、botsort.yaml、bytetrack.yaml、ocsort.yaml、deepocsort.yaml、fasttrack.yaml、tracktrack.yamlです。 |
conf | float | 0.1 | 検出の信頼度しきい値を設定します。低い値を設定するとより多くの物体を追跡できますが、誤検知が含まれる可能性があります。 |
iou | float | 0.7 | 重なり合う検出をフィルタリングするためのIntersection over Union(IoU)しきい値を設定します。 |
classes | list | None | クラスインデックスで結果をフィルタリングします。例えば、classes=[0, 2, 3]と設定すると、指定されたクラスのみを追跡します。 |
verbose | bool | True | 追跡結果の表示を制御し、追跡された物体の視覚的な出力を行います。 |
device | str | None | 推論に使用するデバイスを指定します(例:cpu、cuda:0、または 0)。CPU、特定のGPU、その他の演算デバイスをモデル実行用に選択できます。 |
さらに、以下の可視化オプションもサポートされています:
| 引数 | タイプ | デフォルト | 説明 |
|---|---|---|---|
show | bool | False | Trueの場合、注釈付きの画像や動画をウィンドウに表示します。開発やテスト中の即時的な視覚フィードバックに役立ちます。 |
line_width | int or None | None | バウンディングボックスの線の太さを指定します。Noneの場合、線の太さは画像サイズに基づいて自動的に調整されます。明瞭さのための視覚的なカスタマイズが可能です。 |
show_conf | bool | True | 各検出の信頼度スコアをラベルと一緒に表示します。各検出に対するモデルの確信度を把握できます。 |
show_labels | bool | True | 視覚的出力において各検出のラベルを表示します。検出されたオブジェクトを即座に理解するのに役立ちます。 |
Link to this sectionよくある質問 (FAQ)#
Link to this sectionUltralytics YOLO26を使用してオブジェクトの速度を推定するにはどうすればよいですか?#
Ultralytics YOLO26によるオブジェクトの速度推定は、オブジェクト検出と追跡を組み合わせたものです。モデルは各フレーム内のオブジェクトを検出し、フレーム間を追跡し、フレームレートとmeter_per_pixelスケールを使用してフレーム間の移動距離を速度に変換します。上記のPythonの例では、この完全なパイプラインを実行します。ビデオを渡し、カメラに合わせてmeter_per_pixelを調整してください。詳細については、弊社の公式ブログ投稿を参照してください。
Link to this section交通管理における速度推定にUltralytics YOLO26を使用する利点は何ですか?#
交通管理における速度推定にUltralytics YOLO26を使用することには、大きな利点があります:
- 安全性の向上: 車両速度を正確に推定してスピード違反を検出し、道路の安全性を向上させます。
- リアルタイム監視: YOLO26のリアルタイムオブジェクト検出機能を活用して、交通流や渋滞を効果的に監視します。
- スケーラビリティ: edge devicesからサーバーまで、さまざまなハードウェア構成にモデルをデプロイでき、大規模な実装に対して柔軟でスケーラブルなソリューションを確保します。
その他の応用例については、速度推定の利点を参照してください。
Link to this sectionYOLO26はTensorFlowやPyTorchなどの他のAIフレームワークと統合できますか?#
はい、YOLO26はTensorFlowやPyTorchなどの他のAIフレームワークと統合できます。Ultralyticsは、YOLO26モデルをONNX、TensorRT、CoreMLなどのさまざまな形式にエクスポートするサポートを提供しており、他のMLフレームワークとのスムーズな相互運用性を確保しています。
YOLO26モデルをONNX形式にエクスポートするには:
yolo export model=yolo26n.pt format=onnxモデルのエクスポートに関する詳細は、弊社のエクスポートに関するガイドで確認してください。
Link to this sectionUltralytics YOLO26を使用した速度推定の精度はどの程度ですか?#
Ultralytics YOLO26を使用した速度推定の精度は、オブジェクトトラッキングの品質、動画の解像度とフレームレート、環境変数など、いくつかの要因に依存します。速度推定器は信頼性の高い推定値を提供しますが、フレーム処理速度のばらつきやオブジェクトのオクルージョン(隠れ)により、100%正確ではない場合があります。
注意: 常に誤差の範囲を考慮し、可能な場合はグラウンドトゥルースデータで推定値を検証してください。
精度の向上に関するヒントについては、SpeedEstimatorの引数セクションを確認してください。