Ultralytics YOLO26을 활용한 주차 관리 🚀
주차 관리 시스템이란 무엇입니까?
Ultralytics YOLO26을 활용한 주차 관리는 공간을 체계화하고 가용성을 모니터링하여 효율적이고 안전한 주차를 보장합니다. YOLO26은 실시간 차량 detect 및 주차 점유율에 대한 통찰력을 통해 주차장 관리를 개선할 수 있습니다.
참고: Ultralytics 활용한 주차 관리 시스템 구축 방법 | 실시간 주차 공간 감지 🚗
주차 관리 시스템의 장점
- 효율성: 주차장 관리는 주차 공간 활용도를 최적화하고 혼잡을 줄입니다.
- 안전 및 보안: YOLO26을 활용한 주차 관리는 감시 및 보안 조치를 통해 사람과 차량의 안전을 향상시킵니다.
- 배출량 감소: YOLO26을 활용한 주차 관리는 주차장에서의 공회전 시간과 배출량을 최소화하기 위해 교통 흐름을 관리합니다.
실제 응용 프로그램
| 주차 관리 시스템 | 주차 관리 시스템 |
|---|---|
 |  |
| Ultralytics YOLO26을 활용한 주차 관리 항공 뷰 | Ultralytics YOLO26을 활용한 주차 관리 상단 뷰 |
주차 관리 시스템 코드 워크플로우
이제 포인트 선택이 간편해졌습니다.
주차 지점 선택은 주차 관리 시스템에서 중요하고 복잡한 작업입니다. Ultralytics는 추가 처리를 위해 나중에 활용할 수 있는 주차장 영역을 정의할 수 있는 도구인 "Parking slots annotator"를 제공하여 이 프로세스를 간소화합니다.
1단계: 주차장을 관리하려는 비디오 또는 카메라 스트림에서 프레임을 캡처합니다.
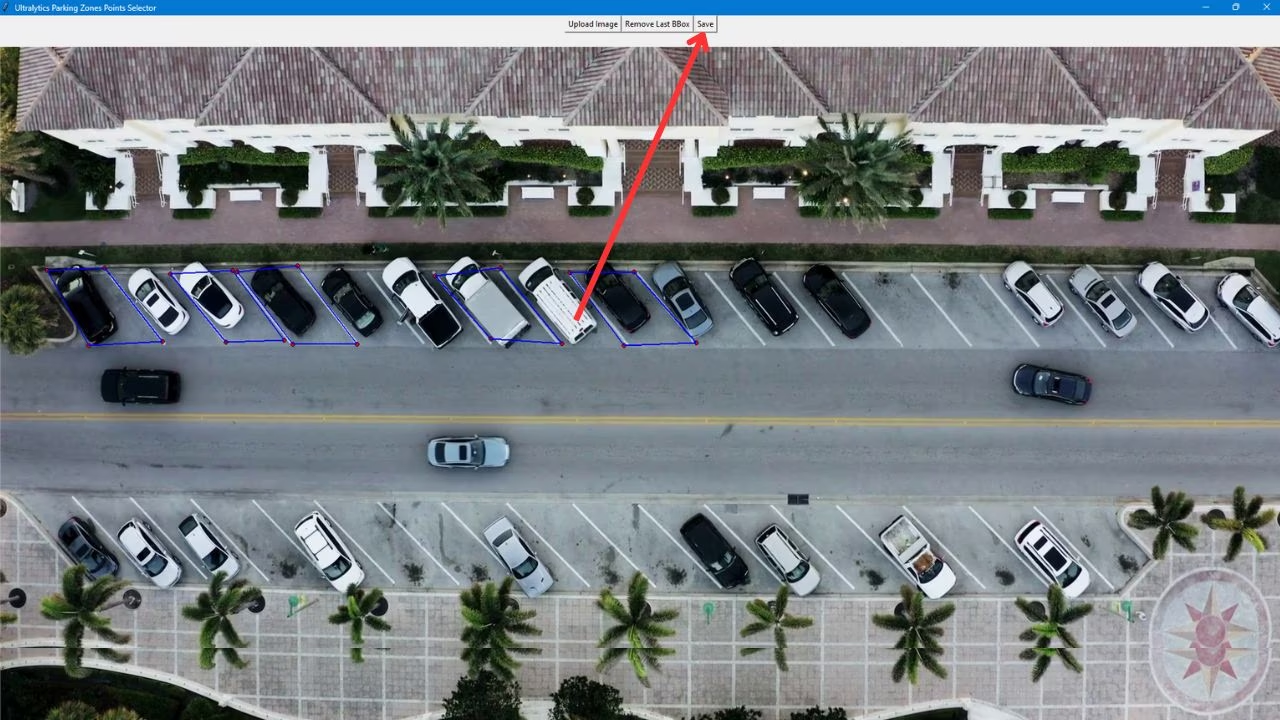
2단계: 제공된 코드를 사용하여 그래픽 인터페이스를 실행합니다. 여기서 이미지를 선택하고 마우스 클릭으로 주차 영역의 윤곽을 그려 다각형을 만들 수 있습니다.
Ultralytics YOLO 주차 공간 어노테이터
설치를 위한 추가 단계 tkinter
일반적으로, tkinter Python과 함께 사전 패키지되어 제공됩니다. 만약 설치되어 있지 않다면, 강조 표시된 단계를 사용하여 설치할 수 있습니다:
- Linux: (Debian/Ubuntu):
sudo apt install python3-tk - Fedora:
sudo dnf install python3-tkinter - 아키텍처:
sudo pacman -S tk - Windows: python을 다시 설치하고 확인란을 활성화합니다.
tcl/tk and IDLE켜짐 선택적 기능 설치하는 동안 - MacOS: 다음에서 python을 다시 설치합니다. https://www.python.org/downloads/macos/ 또는
brew install python-tk
from ultralytics import solutions
solutions.ParkingPtsSelection()
3단계: 다각형으로 주차 구역을 정의한 후 클릭하십시오. save 작업 디렉토리에 데이터가 있는 JSON 파일을 저장합니다.
4단계: 이제 Ultralytics YOLO를 사용하여 주차 관리를 위해 제공된 코드를 활용할 수 있습니다.
Ultralytics YOLO를 사용한 주차 관리
import cv2
from ultralytics import solutions
# Video capture
cap = cv2.VideoCapture("path/to/video.mp4")
assert cap.isOpened(), "Error reading video file"
# Video writer
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("parking management.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Initialize parking management object
parkingmanager = solutions.ParkingManagement(
model="yolo26n.pt", # path to model file
json_file="bounding_boxes.json", # path to parking annotations file
)
while cap.isOpened():
ret, im0 = cap.read()
if not ret:
break
results = parkingmanager(im0)
# print(results) # access the output
video_writer.write(results.plot_im) # write the processed frame.
cap.release()
video_writer.release()
cv2.destroyAllWindows() # destroy all opened windows
yolo solutions parking source="path/to/video.mp4" json_file="bounding_boxes.json" show=True
참고
먼저 다음을 사용하여 주차 구역 주석을 생성합니다. ParkingPtsSelection() Python 위의 2단계) 생성한 후, 해당 JSON 파일을 CLI 에 전달합니다.
ParkingManagement 인수
다음은 테이블에 ParkingManagement 인수입니다.
| 인수 | 유형 | 기본값 | 설명 |
|---|---|---|---|
model | str | None | Ultralytics YOLO 모델 파일의 경로입니다. |
json_file | str | None | 모든 주차 좌표 데이터가 포함된 JSON 파일의 경로입니다. |
에 지정되어 있습니다. ParkingManagement 솔루션을 통해 여러 가지를 사용할 수 있습니다. track 파라미터:
| 인수 | 유형 | 기본값 | 설명 |
|---|---|---|---|
tracker | str | 'botsort.yaml' | 사용할 추적 알고리즘을 지정합니다 (예: bytetrack.yaml 또는 botsort.yaml. |
conf | float | 0.1 | 검출에 대한 신뢰도 임계값을 설정합니다. 값이 낮을수록 더 많은 객체를 추적할 수 있지만 오탐지가 포함될 수 있습니다. |
iou | float | 0.7 | 중복되는 detect를 필터링하기 위한 IoU(Intersection over Union) 임계값을 설정합니다. |
classes | list | None | 클래스 인덱스별로 결과를 필터링합니다. 예를 들어, classes=[0, 2, 3] 지정된 클래스만 추적합니다. |
verbose | bool | True | 추적 결과 표시를 제어하여 추적된 객체의 시각적 출력을 제공합니다. |
device | str | None | 추론을 위한 장치를 지정합니다 (예: cpu, cuda:0 또는 0). 사용자는 모델 실행을 위해 CPU, 특정 GPU 또는 기타 컴퓨팅 장치 중에서 선택할 수 있습니다. |
또한 다음과 같은 시각화 옵션이 지원됩니다:
| 인수 | 유형 | 기본값 | 설명 |
|---|---|---|---|
show | bool | False | 만약 True, 어노테이션이 적용된 이미지나 비디오를 창에 표시합니다. 개발 또는 테스트 중 즉각적인 시각적 피드백에 유용합니다. |
line_width | int or None | None | 경계 상자의 선 너비를 지정합니다. 만약 None, 선 너비는 이미지 크기에 따라 자동으로 조정됩니다. 명확성을 위해 시각적 사용자 정의를 제공합니다. |
FAQ
Ultralytics YOLO26은 주차 관리 시스템을 어떻게 향상시킵니까?
Ultralytics YOLO26은 실시간 차량 detect 및 모니터링을 제공하여 주차 관리 시스템을 크게 향상시킵니다. 이는 주차 공간의 최적화된 사용, 혼잡 감소, 그리고 지속적인 감시를 통한 안전 향상으로 이어집니다. 주차 관리 시스템은 효율적인 교통 흐름을 가능하게 하여 주차장에서의 공회전 시간과 배출량을 최소화함으로써 환경 지속 가능성에 기여합니다. 더 자세한 내용은 주차 관리 코드 워크플로우를 참조하십시오.
스마트 주차에 Ultralytics YOLO26을 사용하는 이점은 무엇입니까?
스마트 주차에 Ultralytics YOLO26을 사용하면 다음과 같은 많은 이점을 얻을 수 있습니다:
- 효율성: 주차 공간 활용도를 최적화하고 혼잡을 줄입니다.
- 안전 및 보안: 감시를 강화하고 차량과 보행자의 안전을 보장합니다.
- 환경 영향: 차량 공회전 시간을 최소화하여 배출량을 줄이는 데 도움이 됩니다. 자세한 내용은 주차 관리 시스템 섹션의 이점에서 확인하십시오.
Ultralytics YOLO26을 사용하여 주차 공간을 어떻게 정의할 수 있습니까?
Ultralytics YOLO26으로 주차 공간을 정의하는 것은 간단합니다:
- 비디오 또는 카메라 스트림에서 프레임을 캡처합니다.
- 제공된 코드를 사용하여 이미지를 선택하고 폴리곤을 그려 주차 공간을 정의하는 GUI를 실행하세요.
- 추가 처리를 위해 레이블이 지정된 데이터를 JSON 형식으로 저장합니다. 자세한 내용은 위의 포인트 선택 섹션을 확인하십시오.
특정 주차 관리 요구 사항에 맞게 YOLO26 모델을 사용자 정의할 수 있습니까?
네, Ultralytics YOLO26은 특정 주차 관리 요구 사항에 맞춰 사용자 정의를 허용합니다. 다음과 같은 매개변수를 조정할 수 있습니다. 점유 및 사용 가능한 영역 색상, 텍스트 표시 여백 등 다양한 설정을 할 수 있습니다. 다음을 활용하여 ParkingManagement 클래스의 인수들, 특정 요구 사항에 맞게 모델을 조정하여 효율성과 효과를 극대화할 수 있습니다.
주차장 관리에서 Ultralytics YOLO26의 실제 적용 사례는 무엇입니까?
Ultralytics YOLO26은 주차장 관리를 위한 다양한 실제 애플리케이션에 활용됩니다. 예를 들어:
- 주차 공간 감지: 사용 가능한 공간과 사용 중인 공간을 정확하게 식별합니다.
- 감시: 실시간 모니터링을 통한 보안 강화.
- 교통 흐름 관리: 효율적인 교통 처리를 통해 유휴 시간과 혼잡을 줄입니다. 이러한 응용 프로그램을 보여주는 이미지는 실제 응용 프로그램에서 찾을 수 있습니다.






