Link to this sectionMeituan YOLOv6#
Link to this section개요#
Meituan YOLOv6, released in 2022, offers a strong balance between speed and accuracy, making it a popular choice for real-time applications. This model introduces several notable enhancements on its architecture and training scheme, including the implementation of a Bi-directional Concatenation (BiC) module, an anchor-aided training (AAT) strategy, and an improved backbone and neck design for high accuracy on the COCO dataset.
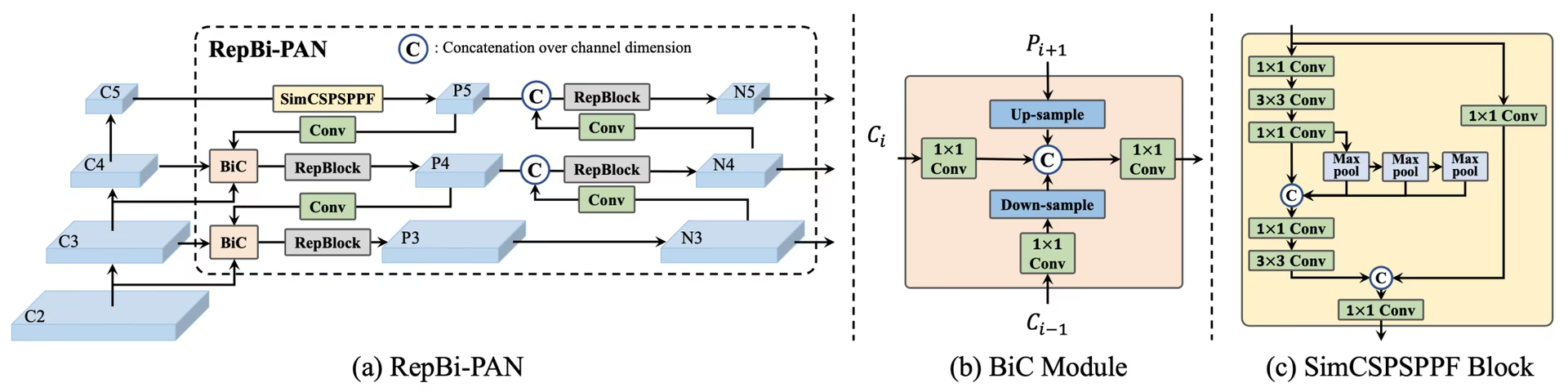 YOLOv6 개요. 상당한 성능 향상을 이끈 재설계된 네트워크 구성 요소와 학습 전략을 보여주는 모델 아키텍처 다이어그램입니다. (a) YOLOv6의 neck (N 및 S가 표시됨). M/L의 경우 RepBlocks가 CSPStackRep으로 대체됩니다. (b) BiC 모듈의 구조. (c) SimCSPSPPF 블록. (source).
YOLOv6 개요. 상당한 성능 향상을 이끈 재설계된 네트워크 구성 요소와 학습 전략을 보여주는 모델 아키텍처 다이어그램입니다. (a) YOLOv6의 neck (N 및 S가 표시됨). M/L의 경우 RepBlocks가 CSPStackRep으로 대체됩니다. (b) BiC 모듈의 구조. (c) SimCSPSPPF 블록. (source).
Link to this section주요 특징#
- Bidirectional Concatenation (BiC) 모듈: YOLOv6는 탐지기의 neck 부분에 BiC 모듈을 도입하여 위치 파악 신호를 향상시키고, 속도 저하를 최소화하면서 성능을 향상시킵니다.
- Anchor-Aided Training (AAT) 전략: 이 모델은 추론 효율성을 저해하지 않으면서 anchor-based 및 anchor-free 패러다임의 이점을 모두 누리기 위해 AAT를 제안합니다.
- 향상된 Backbone 및 Neck 설계: YOLOv6의 backbone과 neck에 단계를 추가하여 깊이를 더함으로써, 이 모델은 발표 당시 고해상도 입력에서 COCO 데이터셋에 대해 강력한 성능을 달성했습니다.
- Self-Distillation 전략: YOLOv6의 더 작은 모델들의 성능을 높이기 위해 새로운 self-distillation 전략이 구현되었습니다. 이는 학습 중 보조 회귀 브랜치를 강화하고, 추론 시에는 현저한 속도 저하를 방지하기 위해 이를 제거합니다.
Link to this section성능 지표#
YOLOv6는 다양한 스케일의 사전 학습된 모델을 제공합니다:
- YOLOv6-N: NVIDIA T4 GPU에서 1187 FPS로 COCO val2017에서 37.5% AP.
- YOLOv6-S: 484 FPS에서 45.0% AP.
- YOLOv6-M: 226 FPS에서 50.0% AP.
- YOLOv6-L: 116 FPS에서 52.8% AP.
- YOLOv6-L6: 실시간에서 최첨단 정확도.
YOLOv6는 또한 다양한 precisions에 대한 양자화된 모델과 모바일 플랫폼에 최적화된 모델을 제공합니다.
Link to this section사용 예제#
이 예제는 간단한 YOLOv6 학습 및 추론 사례를 제공합니다. 이러한 modes 및 기타 모드에 대한 전체 문서는 Predict, Train, Val 및 Export 문서 페이지를 참조하십시오.
YOLOv6 *.yaml 파일을 YOLO() 클래스에 전달하여 Python에서 해당 모델을 빌드할 수 있습니다:
from ultralytics import YOLO
# Build a YOLOv6n model from scratch
model = YOLO("yolov6n.yaml")
# Display model information (optional)
model.info()
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLOv6n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")Link to this section지원되는 작업 및 모드#
YOLOv6 시리즈는 고성능 Object Detection을 위해 최적화된 다양한 모델을 제공합니다. 이러한 모델은 다양한 계산 요구 사항과 accuracy 요구 사항을 충족하여 광범위한 애플리케이션에서 다재다능하게 사용됩니다.
| 모델 | 파일 이름 | 작업 | 추론 | 검증 | 학습 | 내보내기(Export) |
|---|---|---|---|---|---|---|
| YOLOv6-N | yolov6n.yaml | 객체 탐지 | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-S | yolov6s.yaml | 객체 탐지 | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-M | yolov6m.yaml | 객체 탐지 | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-L | yolov6l.yaml | 객체 탐지 | ✅ | ✅ | ✅ | ✅ |
| YOLOv6-X | yolov6x.yaml | 객체 탐지 | ✅ | ✅ | ✅ | ✅ |
이 표는 YOLOv6 모델 변형에 대한 자세한 개요를 제공하며, object detection 작업에서의 성능과 Inference, Validation, Training, Export와 같은 다양한 운영 모드와의 호환성을 강조합니다. 이러한 포괄적인 지원을 통해 사용자는 다양한 객체 탐지 시나리오에서 YOLOv6 모델의 기능을 완전히 활용할 수 있습니다.
Link to this section인용 및 감사의 글#
실시간 객체 탐지 분야에 중요한 기여를 한 저자들에게 감사를 표합니다:
@misc{li2023yolov6,
title={YOLOv6 v3.0: A Full-Scale Reloading},
author={Chuyi Li and Lulu Li and Yifei Geng and Hongliang Jiang and Meng Cheng and Bo Zhang and Zaidan Ke and Xiaoming Xu and Xiangxiang Chu},
year={2023},
eprint={2301.05586},
archivePrefix={arXiv},
primaryClass={cs.CV}
}원본 YOLOv6 논문은 arXiv에서 찾을 수 있습니다. 저자들은 그들의 연구를 공개했으며, 코드베이스는 GitHub에서 액세스할 수 있습니다. 우리는 이 분야를 발전시키고 더 넓은 커뮤니티가 그들의 연구를 이용할 수 있도록 노력해 준 저자들의 노고에 감사드립니다.
Link to this sectionFAQ#
Link to this sectionMeituan YOLOv6란 무엇이며 무엇이 독특합니까?#
2022년에 발표된 Meituan YOLOv6는 실시간 애플리케이션을 위해 설계된 속도와 정확도의 균형을 맞춘 객체 탐지기입니다. 이 모델은 Bi-directional Concatenation (BiC) 모듈과 Anchor-Aided Training (AAT) 전략과 같은 주목할 만한 아키텍처 개선 사항을 특징으로 합니다. 이러한 혁신은 최소한의 속도 저하로 상당한 성능 향상을 제공하여 YOLOv6를 객체 탐지 작업에서 경쟁력 있는 선택지로 만듭니다.
Link to this sectionYOLOv6의 Bi-directional Concatenation (BiC) 모듈은 성능을 어떻게 개선합니까?#
YOLOv6의 Bi-directional Concatenation (BiC) 모듈은 탐지기 neck의 위치 파악 신호를 향상시켜 속도 영향은 거의 없이 성능 향상을 제공합니다. 이 모듈은 서로 다른 feature maps를 효과적으로 결합하여 모델이 객체를 정확하게 감지하는 능력을 높입니다. YOLOv6의 기능에 대한 자세한 내용은 Key Features 섹션을 참조하십시오.
Link to this sectionUltralytics를 사용하여 YOLOv6 모델을 학습하려면 어떻게 해야 합니까?#
간단한 Python 또는 CLI 명령어를 사용하여 Ultralytics로 YOLOv6 모델을 학습할 수 있습니다. 예시:
from ultralytics import YOLO
# Build a YOLOv6n model from scratch
model = YOLO("yolov6n.yaml")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)자세한 내용은 Train 페이지를 방문하십시오.
Link to this sectionYOLOv6의 다양한 버전과 그 성능 지표는 무엇입니까?#
YOLOv6는 각각 다른 성능 요구 사항에 최적화된 여러 버전을 제공합니다:
- YOLOv6-N: 1187 FPS에서 37.5% AP
- YOLOv6-S: 484 FPS에서 45.0% AP
- YOLOv6-M: 226 FPS에서 50.0% AP
- YOLOv6-L: 116 FPS에서 52.8% AP
- YOLOv6-L6: 실시간 시나리오에서의 최첨단 정확도
이 모델들은 NVIDIA T4 GPU를 사용하여 COCO 데이터셋에서 평가되었습니다. 성능 지표에 대한 자세한 내용은 Performance Metrics 섹션을 참조하십시오.
Link to this sectionAnchor-Aided Training (AAT) 전략은 YOLOv6에 어떤 이점을 줍니까?#
YOLOv6의 Anchor-Aided Training (AAT)은 anchor-based 및 anchor-free 접근 방식의 요소를 결합하여 추론 효율성을 저해하지 않으면서 모델의 탐지 능력을 향상시킵니다. 이 전략은 학습 중에 앵커를 활용하여 bounding box 예측을 개선함으로써 YOLOv6를 다양한 객체 탐지 작업에서 효과적으로 만듭니다.
Link to this sectionUltralytics의 YOLOv6 모델에서 지원되는 운영 모드는 무엇입니까?#
YOLOv6는 Inference, Validation, Training 및 Export를 포함한 다양한 운영 모드를 지원합니다. 이러한 유연성을 통해 사용자는 다양한 시나리오에서 모델의 기능을 최대한 활용할 수 있습니다. 각 모드에 대한 자세한 개요는 Supported Tasks and Modes 섹션을 확인하십시오.