Link to this sectionRoboflow 100 Veri Kümesi#
Roboflow 100, sponsored by Intel, is a groundbreaking object detection benchmark dataset. It includes 100 diverse datasets. This benchmark is specifically designed to test the adaptability of computer vision models, like Ultralytics YOLO models, to various domains, including healthcare, aerial imagery, and video games.
Ultralytics, farklı kullanım senaryolarına uyum sağlamak için iki lisanslama seçeneği sunar:
- AGPL-3.0 Lisansı: Bu OSI onaylı açık kaynak lisansı, öğrenciler ve meraklılar için idealdir; açık iş birliğini ve bilgi paylaşımını teşvik eder. Daha fazla ayrıntı için LICENSE dosyasına bakın ve AGPL-3.0 Lisans sayfamızı ziyaret edin.
- Kurumsal Lisans: Geliştirme ve üretim kullanımı için bu lisans, Ultralytics yazılımının ve yapay zeka modellerinin; dahili araçlar, otomatik iş akışları ve üretim dağıtımları dahil olmak üzere ticari ürün ve hizmetlere sorunsuz entegrasyonunu sağlar ve AGPL-3.0'ın açık kaynak gereksinimlerini atlar. Başlamak için lütfen Ultralytics Licensing aracılığıyla bizimle iletişime geç.
Link to this sectionTemel Özellikler#
- Çeşitli Alanlar: Hava, Video oyunları, Mikroskobik, Sualtı, Belgeler, Elektromanyetik ve Gerçek Dünya olmak üzere yedi farklı alanda 100 veri kümesi içerir.
- Ölçek: Kıyaslama, 11.170 saatin üzerinde veri etiketleme çalışmasını temsil eden 805 sınıf genelinde 224.714 görüntüden oluşmaktadır.
- Standardizasyon: Tüm görüntüler, tutarlı bir değerlendirme için ön işleme tabi tutulur ve 640x640 piksele yeniden boyutlandırılır.
- Temiz Değerlendirme: Daha temiz bir model değerlendirmesi sağlamak için sınıf belirsizliğini ortadan kaldırmaya odaklanır ve yetersiz temsil edilen sınıfları filtreler.
- Açıklamalar: Nesneler için sınırlayıcı kutular içerir; bu da eğitim ve mAP gibi metrikler kullanılarak nesne algılama modellerinin değerlendirilmesi için uygundur.
Link to this sectionVeri Kümesi Yapısı#
Roboflow 100 veri kümesi, her biri benzersiz bir veri kümesi, görüntü ve sınıf koleksiyonu içeren yedi kategoriye ayrılmıştır:
- Hava: 7 veri kümesi, 9.683 görüntü, 24 sınıf.
- Video Oyunları: 7 veri kümesi, 11.579 görüntü, 88 sınıf.
- Mikroskobik: 11 veri kümesi, 13.378 görüntü, 28 sınıf.
- Sualtı: 5 veri kümesi, 18.003 görüntü, 39 sınıf.
- Belgeler: 8 veri kümesi, 24.813 görüntü, 90 sınıf.
- Elektromanyetik: 12 veri kümesi, 36.381 görüntü, 41 sınıf.
- Gerçek Dünya: 50 veri kümesi, 110.615 görüntü, 495 sınıf.
This structure provides a diverse and extensive testing ground for object detection models, reflecting a wide array of real-world application scenarios found in various Ultralytics Solutions.
Link to this sectionKıyaslama#
Veri kümesi kıyaslama çalışması, makine öğrenimi modellerinin performansını standart metrikler kullanarak belirli veri kümeleri üzerinde değerlendirmeyi içerir. Yaygın metrikler arasında doğruluk, ortalama Ortalama Hassasiyet (mAP) ve F1-skoru bulunur. Bunlar hakkında daha fazla bilgiyi YOLO Performans Metrikleri kılavuzumuzda bulabilirsin.
Every output is grouped under a single runs/<task>/multitrain/ directory: each dataset is fine-tuned in its own subdirectory (with its own results.png), and the per-dataset and mean metrics are written to multitrain_results.json alongside a multitrain_results.png bar chart. The model.train() call also returns a {dataset: metrics} dictionary for programmatic access.
Aşağıdaki betik, datasets_links.txt içinde listelenen Roboflow 100 veri kümelerini Roboflow'dan indirir ve ardından tek bir model.train() çağrısında tüm koleksiyon genelinde tek bir temel modeli (örneğin, YOLO26n) ince ayar yapar. Veri kümesi listesi geçirmek, temel modelin her birinde seri olarak ince ayar yapılmasını sağlar ve veri kümeleri arası sonuçları otomatik olarak görselleştirir.
import re
from pathlib import Path
from roboflow import Roboflow
from ultralytics import YOLO
from ultralytics.utils import ASSETS_URL, YAML
from ultralytics.utils.downloads import safe_download
# Download the RF100 datasets (requires a Roboflow API key)
rf = Roboflow(api_key="YOUR_ROBOFLOW_API_KEY")
safe_download(f"{ASSETS_URL}/datasets_links.txt") # list of RF100 dataset links
datasets = []
for line in Path("datasets_links.txt").read_text().splitlines():
try:
_, _url, workspace, project, version = re.split("/+", line.strip())
location = f"rf-100/{project}-{version}"
rf.workspace(workspace).project(project).version(version).download("yolov8", location=location)
yaml = Path(location) / "data.yaml"
cfg = YAML.load(yaml) # point train/val at the downloaded image folders
cfg["train"], cfg["val"] = "train/images", "valid/images"
YAML.save(yaml, cfg)
datasets.append(str(yaml))
except Exception:
continue
# Fine-tune one base model across all RF100 datasets and visualize the cross-dataset results
model = YOLO("yolo26n.pt")
results = model.train(data=datasets, epochs=100, imgsz=640) # {dataset: metrics}
# Per-dataset runs, multitrain_results.json (per-dataset + mean), and multitrain_results.png are saved
# together under runs/detect/multitrain. Read results in-memory or from the JSON for custom post-processing.
for dataset, metrics in results.items():
if metrics: # None if that dataset failed to train
print(f"{dataset}: mAP50-95 = {metrics['metrics/mAP50-95(B)']:.4f}")Link to this sectionUygulamalar#
Roboflow 100, bilgisayarlı görü ve derin öğrenme ile ilgili çeşitli uygulamalar için paha biçilmezdir. Araştırmacılar ve mühendisler bu kıyaslamadan şunlar için yararlanabilir:
- Nesne algılama modellerinin performansını çok alanlı bir bağlamda değerlendirmek.
- Test the adaptability and robustness of models to real-world scenarios beyond common benchmark datasets like COCO or PASCAL VOC.
- Sağlık hizmetleri, hava görüntüleri ve video oyunları gibi özel alanlar da dahil olmak üzere çeşitli veri kümeleri üzerinde nesne algılama modellerinin yeteneklerini kıyaslamak.
- Model performansını farklı sinir ağı mimarileri ve optimizasyon teknikleri arasında karşılaştırmak.
- Identify domain-specific challenges that may require specialized model training tips or fine-tuning approaches like transfer learning.
For more ideas and inspiration on real-world applications, explore our guides on practical projects or check out Ultralytics Platform for streamlined model training and deployment.
Link to this sectionKullanım#
Meta veriler ve indirme bağlantıları dahil olmak üzere Roboflow 100 veri kümesi, resmi Roboflow 100 GitHub deposunda mevcuttur. Kıyaslama ihtiyaçların için veri kümesine doğrudan oradan erişebilir ve kullanabilirsin. Veri kümeleri indirildikten ve yukarıda gösterildiği gibi hazırlandıktan sonra, Ultralytics modelleri, veri kümesi YAML listesini ileterek tek bir model.train() çağrısında tüm koleksiyon boyunca ince ayar yapılabilir.
Link to this sectionÖrnek Veriler ve Etiketler#
Roboflow 100, çeşitli açılardan ve alanlardan çekilmiş farklı görüntülere sahip veri kümelerinden oluşur. Aşağıda, RF100 kıyaslamasına dahil edilen, nesnelerin ve sahnelerin çeşitliliğini sergileyen açıklamalı görüntü örnekleri bulunmaktadır. Veri artırma gibi teknikler, eğitim sırasında çeşitliliği daha da artırabilir.
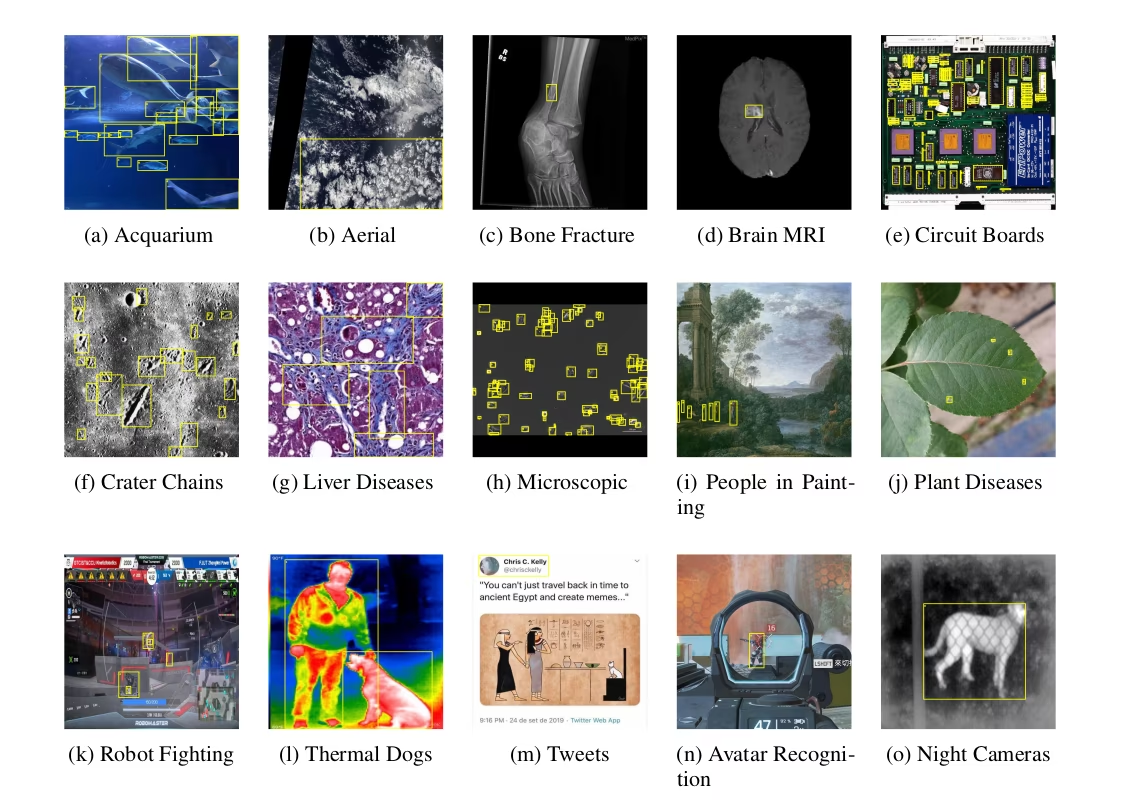
Roboflow 100 kıyaslamasında görülen çeşitlilik, genellikle sınırlı bir alan içindeki tek bir metriği optimize etmeye odaklanan geleneksel kıyaslamalardan önemli bir ilerlemeyi temsil eder. Bu kapsamlı yaklaşım, birçok farklı senaryoda iyi performans gösterebilen daha sağlam ve çok yönlü bilgisayarlı görü modellerinin geliştirilmesine yardımcı olur.
Link to this sectionAlıntılar ve Teşekkür#
Roboflow 100 veri kümesini araştırma veya geliştirme çalışmalarında kullanıyorsan, lütfen orijinal makaleye atıfta bulun:
@misc{rf100benchmark,
Author = {Floriana Ciaglia and Francesco Saverio Zuppichini and Paul Guerrie and Mark McQuade and Jacob Solawetz},
Title = {Roboflow 100: A Rich, Multi-Domain Object Detection Benchmark},
Year = {2022},
Eprint = {arXiv:2211.13523},
url = {https://arxiv.org/abs/2211.13523}
}Roboflow 100 veri kümesini bilgisayarlı görü topluluğu için değerli bir kaynak olarak oluşturma ve sürdürmedeki önemli çabaları için Roboflow ekibine ve tüm katkıda bulunanlara minnettarız.
If you are interested in exploring more datasets to enhance your object detection and machine learning projects, feel free to visit our comprehensive dataset collection, which includes a variety of other detection datasets.
Link to this sectionSSS#
Link to this sectionRoboflow 100 veri kümesi nedir ve nesne algılama için neden önemlidir?#
Roboflow 100 veri kümesi, nesne algılama modelleri için bir kıyaslamadır. Sağlık hizmetleri, hava görüntüleri ve video oyunları gibi alanları kapsayan 100 farklı veri kümesinden oluşur. Önemi, geleneksel, genellikle alanla sınırlı kıyaslamaların ötesine geçerek, modelin uyarlanabilirliğini ve sağlamlığını çok çeşitli gerçek dünya senaryolarında test etmek için standartlaştırılmış bir yol sağlamasında yatar.
Link to this sectionRoboflow 100 veri kümesi hangi alanları kapsar?#
Roboflow 100 veri kümesi, nesne algılama modelleri için benzersiz zorluklar sunan yedi farklı alana yayılmaktadır:
- Hava: 7 veri kümesi (örneğin, uydu görüntüleri, dron görünümleri).
- Video Oyunları: 7 veri kümesi (örneğin, çeşitli oyun ortamlarından nesneler).
- Mikroskobik: 11 veri kümesi (örneğin, hücreler, parçacıklar).
- Sualtı: 5 veri kümesi (örneğin, deniz yaşamı, su altındaki nesneler).
- Belgeler: 8 veri kümesi (örneğin, metin bölgeleri, form öğeleri).
- Elektromanyetik: 12 veri kümesi (örneğin, radar imzaları, spektral veri görselleştirmeleri).
- Gerçek Dünya: 50 veri kümesi (günlük nesneler, sahneler, perakende vb. içeren geniş bir kategori).
Bu çeşitlilik, RF100'ü bilgisayarlı görü modellerinin genelleştirilebilirliğini değerlendirmek için mükemmel bir kaynak haline getirir.
Link to this sectionAraştırmamda Roboflow 100 veri kümesine atıfta bulunurken neleri dahil etmeliyim?#
Roboflow 100 veri kümesini kullanırken, oluşturuculara kredi vermek için lütfen orijinal makaleye atıfta bulun. Önerilen BibTeX alıntısı şöyledir:
@misc{rf100benchmark,
Author = {Floriana Ciaglia and Francesco Saverio Zuppichini and Paul Guerrie and Mark McQuade and Jacob Solawetz},
Title = {Roboflow 100: A Rich, Multi-Domain Object Detection Benchmark},
Year = {2022},
Eprint = {arXiv:2211.13523},
url = {https://arxiv.org/abs/2211.13523}
}Daha fazla keşif için kapsamlı veri kümesi koleksiyonumuzu ziyaret etmeyi veya Ultralytics modelleriyle uyumlu diğer algılama veri kümelerine göz atmayı düşünebilirsin.