Link to this sectionBasit Yardımcı Araçlar#

ultralytics paketi, iş akışlarını desteklemek, geliştirmek ve hızlandırmak için çeşitli yardımcı araçlar sunar. Çok daha fazlası mevcut olsa da, bu kılavuz geliştiriciler için en kullanışlı olanlardan bazılarını vurgulayarak, Ultralytics araçlarıyla programlama için pratik bir referans görevi görür.
Watch: Ultralytics Utilities | Auto Annotation, Explorer API and Dataset Conversion
Link to this sectionVeri#
Link to this sectionOtomatik Etiketleme / Açıklamalar#
Veri seti açıklama süreci, kaynak yoğun ve zaman alıcı bir işlemdir. Makul miktarda veri üzerinde eğitilmiş bir Ultralytics YOLO nesne algılama modeline sahipsen, ek verileri segmentasyon formatında otomatik olarak etiketlemek için bunu SAM ile birlikte kullanabilirsin.
from ultralytics.data.annotator import auto_annotate
auto_annotate(
data="path/to/new/data",
det_model="yolo26n.pt",
sam_model="mobile_sam.pt",
device="cuda",
output_dir="path/to/save_labels",
)Bu fonksiyon herhangi bir değer döndürmez. Daha fazla ayrıntı için:
- Fonksiyonun nasıl çalıştığına dair daha fazla bilgi için
annotator.auto_annotatereferans bölümüne göz at. - Nesne algılama sınırlayıcı kutularını (bounding boxes) da oluşturmak için
segments2boxesfonksiyonu ile birlikte kullan.
Link to this sectionVeri Seti Açıklamalarını Görselleştir#
Bu fonksiyon, eğitimden önce bir görüntü üzerindeki YOLO açıklamalarını görselleştirir ve hatalı algılama sonuçlarına yol açabilecek yanlış açıklamaların belirlenmesine ve düzeltilmesine yardımcı olur. Sınırlayıcı kutuları çizer, nesneleri sınıf adlarıyla etiketler ve daha iyi okunabilirlik için metin rengini arka planın parlaklığına göre ayarlar.
from ultralytics.data.utils import visualize_image_annotations
label_map = { # Define the label map with all annotated class labels.
0: "person",
1: "car",
}
# Visualize
visualize_image_annotations(
"path/to/image.jpg", # Input image path.
"path/to/annotations.txt", # Annotation file path for the image.
label_map,
)Link to this sectionSegmentasyon Maskelerini YOLO Formatına Dönüştür#
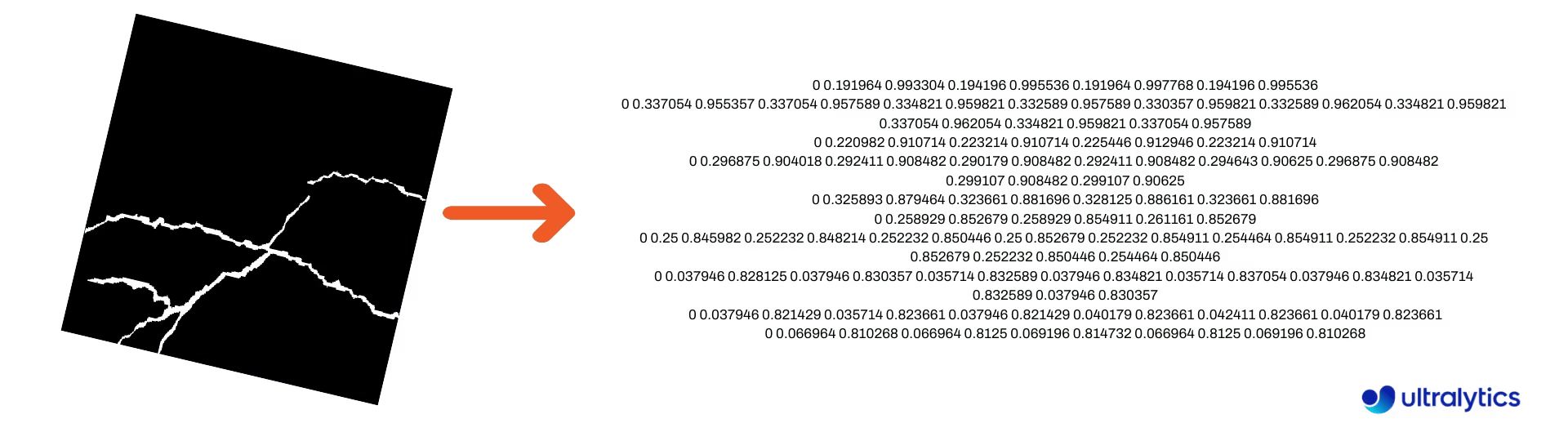
Bunu, bir segmentasyon maske görüntüleri veri setini Ultralytics YOLO segmentasyon formatına dönüştürmek için kullan. Bu fonksiyon, ikili formatta maske görüntülerini içeren dizini alır ve bunları YOLO segmentasyon formatına dönüştürür.
Dönüştürülen maskeler belirtilen çıktı dizinine kaydedilecektir.
from ultralytics.data.converter import convert_segment_masks_to_yolo_seg
# The classes here is the total classes in the dataset.
# for COCO dataset we have 80 classes.
convert_segment_masks_to_yolo_seg(masks_dir="path/to/masks_dir", output_dir="path/to/output_dir", classes=80)Link to this sectionCOCO Formatını YOLO Formatına Dönüştür#
Bunu COCO JSON açıklamalarını YOLO formatına dönüştürmek için kullan. Nesne algılama (sınırlayıcı kutu) veri kümeleri için hem use_segments hem de use_keypoints değerlerini False olarak ayarla.
from ultralytics.data.converter import convert_coco
convert_coco(
"coco/annotations/",
use_segments=False,
use_keypoints=False,
cls91to80=True,
)convert_coco fonksiyonu hakkında ek bilgi için referans sayfasını ziyaret et.
Link to this sectionSınırlayıcı Kutu Boyutlarını Al#
import cv2
from ultralytics import YOLO
from ultralytics.utils.plotting import Annotator
model = YOLO("yolo26n.pt") # Load pretrain or fine-tune model
# Process the image
source = cv2.imread("path/to/image.jpg")
results = model(source)
# Extract results
annotator = Annotator(source, example=model.names)
for box in results[0].boxes.xyxy.cpu():
width, height, area = annotator.get_bbox_dimension(box)
print(f"Bounding Box Width {width.item()}, Height {height.item()}, Area {area.item()}")Link to this sectionSınırlayıcı Kutuları Segmentlere Dönüştür#
Mevcut x y w h sınırlayıcı kutu verilerini kullanarak, yolo_bbox2segment fonksiyonu ile bunları segmentlere dönüştür. Görüntüler ve açıklamalar için dosyaları şu şekilde düzenle:
data
|__ images
├─ 001.jpg
├─ 002.jpg
├─ ..
└─ NNN.jpg
|__ labels
├─ 001.txt
├─ 002.txt
├─ ..
└─ NNN.txtfrom ultralytics.data.converter import yolo_bbox2segment
yolo_bbox2segment(
im_dir="path/to/images",
save_dir=None, # saved to "labels-segment" in images directory
sam_model="sam_b.pt",
)Fonksiyonla ilgili daha fazla bilgi için yolo_bbox2segment referans sayfasını ziyaret et.
Link to this sectionSegmentleri Sınırlayıcı Kutulara Dönüştür#
Segmentasyon veri seti formatını kullanan bir veri setine sahipsen, bunları bu fonksiyonla kolayca dik (veya yatay) sınırlayıcı kutulara (x y w h formatı) dönüştürebilirsin.
import numpy as np
from ultralytics.utils.ops import segments2boxes
segments = np.array(
[
[805, 392, 797, 400, 812, 402, 808, 714, 808, 392],
[115, 398, 113, 400, 150, 410, 150, 400, 149, 298],
[267, 412, 265, 413, 300, 420, 300, 413, 299, 412],
],
dtype=np.float32,
)
segments2boxes([s.reshape(-1, 2) for s in segments])
# >>> array([[804.5, 553. , 15. , 322. ],
# [131.5, 354. , 37. , 112. ],
# [282.5, 416. , 35. , 8. ]],
# dtype=float32) # xywh bounding boxesBu fonksiyonun nasıl çalıştığını anlamak için referans sayfasını ziyaret et.
Link to this sectionYardımcı Araçlar#
Link to this sectionGörüntü Sıkıştırma#
Tek bir görüntü dosyasını, en boy oranını ve kalitesini korurken azaltılmış bir boyuta sıkıştır. Giriş görüntüsü maksimum boyuttan küçükse, yeniden boyutlandırılmayacaktır.
from pathlib import Path
from ultralytics.data.utils import compress_one_image
for f in Path("path/to/dataset").rglob("*.jpg"):
compress_one_image(f)Link to this sectionOtomatik Veri Seti Bölme#
Bir veri setini otomatik olarak train/val/test şeklinde böl ve sonuçları autosplit_*.txt dosyalarına kaydet. Bu fonksiyon rastgele örnekleme kullanır; bu, eğitim için fraction argümanı kullanıldığında devre dışı kalır.
from ultralytics.data.split import autosplit
autosplit(
path="path/to/images",
weights=(0.9, 0.1, 0.0), # (train, validation, test) fractional splits
annotated_only=False, # split only images with annotation file when True
)Bu fonksiyonla ilgili ek ayrıntılar için Referans sayfasına bak.
Link to this sectionSegment-poligonunu İkili Maskeye Dönüştür#
Convert a single polygon (as a list) to a binary mask of the specified image size. The polygon should be a flat 1D array of N coordinates listing alternating x, y values defining the polygon contour.
N her zaman çift olmalıdır.
import numpy as np
from ultralytics.data.utils import polygon2mask
imgsz = (1080, 810)
polygon = np.array([805, 392, 797, 400, ..., 808, 714, 808, 392]) # (238, 2)
mask = polygon2mask(
imgsz, # tuple
[polygon], # input as list
color=255, # 8-bit binary
downsample_ratio=1,
)Link to this sectionSınırlayıcı Kutular#
Link to this sectionSınırlayıcı Kutu (Yatay) Örnekleri#
Sınırlayıcı kutu verilerini yönetmek için Bboxes sınıfı, kutu koordinat formatları arasında dönüştürme yapmaya, kutu boyutlarını ölçeklendirmeye, alanları hesaplamaya, ofsetleri dahil etmeye ve daha fazlasına yardımcı olur.
import numpy as np
from ultralytics.utils.instance import Bboxes
boxes = Bboxes(
bboxes=np.array(
[
[22.878, 231.27, 804.98, 756.83],
[48.552, 398.56, 245.35, 902.71],
[669.47, 392.19, 809.72, 877.04],
[221.52, 405.8, 344.98, 857.54],
[0, 550.53, 63.01, 873.44],
[0.0584, 254.46, 32.561, 324.87],
]
),
format="xyxy",
)
boxes.areas()
# >>> array([ 4.1104e+05, 99216, 68000, 55772, 20347, 2288.5])
boxes.convert("xywh")
print(boxes.bboxes)
# >>> array(
# [[ 413.93, 494.05, 782.1, 525.56],
# [ 146.95, 650.63, 196.8, 504.15],
# [ 739.6, 634.62, 140.25, 484.85],
# [ 283.25, 631.67, 123.46, 451.74],
# [ 31.505, 711.99, 63.01, 322.91],
# [ 16.31, 289.67, 32.503, 70.41]]
# )Daha fazla öznitelik ve yöntem için Bboxes referans bölümüne bak.
Aşağıdaki fonksiyonların çoğu (ve daha fazlası) Bboxes sınıfı kullanılarak erişilebilir, ancak fonksiyonlarla doğrudan çalışmayı tercih edersen, bunları nasıl bağımsız olarak içe aktaracağını öğrenmek için sonraki alt bölümlere bak.
Link to this sectionKutuları Ölçeklendirme#
Bir görüntüyü büyütürken veya küçültürken, karşılık gelen sınırlayıcı kutu koordinatlarını ultralytics.utils.ops.scale_boxes kullanarak uygun şekilde ölçekleyebilirsin.
import cv2 as cv
import numpy as np
from ultralytics.utils.ops import scale_boxes
image = cv.imread("ultralytics/assets/bus.jpg")
h, w, c = image.shape
resized = cv.resize(image, None, (), fx=1.2, fy=1.2)
new_h, new_w, _ = resized.shape
xyxy_boxes = np.array(
[
[22.878, 231.27, 804.98, 756.83],
[48.552, 398.56, 245.35, 902.71],
[669.47, 392.19, 809.72, 877.04],
[221.52, 405.8, 344.98, 857.54],
[0, 550.53, 63.01, 873.44],
[0.0584, 254.46, 32.561, 324.87],
]
)
new_boxes = scale_boxes(
img1_shape=(h, w), # original image dimensions
boxes=xyxy_boxes, # boxes from original image
img0_shape=(new_h, new_w), # resized image dimensions (scale to)
ratio_pad=None,
padding=False,
xywh=False,
)
print(new_boxes)
# >>> array(
# [[ 27.454, 277.52, 965.98, 908.2],
# [ 58.262, 478.27, 294.42, 1083.3],
# [ 803.36, 470.63, 971.66, 1052.4],
# [ 265.82, 486.96, 413.98, 1029],
# [ 0, 660.64, 75.612, 1048.1],
# [ 0.0701, 305.35, 39.073, 389.84]]
# )Link to this sectionSınırlayıcı Kutu Format Dönüşümleri#
Link to this sectionXYXY → XYWH#
Sınırlayıcı kutu koordinatlarını (x1, y1, x2, y2) formatından (x, y, genişlik, yükseklik) formatına dönüştür; burada (x1, y1) sol üst köşe ve (x2, y2) sağ alt köşedir.
import numpy as np
from ultralytics.utils.ops import xyxy2xywh
xyxy_boxes = np.array(
[
[22.878, 231.27, 804.98, 756.83],
[48.552, 398.56, 245.35, 902.71],
[669.47, 392.19, 809.72, 877.04],
[221.52, 405.8, 344.98, 857.54],
[0, 550.53, 63.01, 873.44],
[0.0584, 254.46, 32.561, 324.87],
]
)
xywh = xyxy2xywh(xyxy_boxes)
print(xywh)
# >>> array(
# [[ 413.93, 494.05, 782.1, 525.56],
# [ 146.95, 650.63, 196.8, 504.15],
# [ 739.6, 634.62, 140.25, 484.85],
# [ 283.25, 631.67, 123.46, 451.74],
# [ 31.505, 711.99, 63.01, 322.91],
# [ 16.31, 289.67, 32.503, 70.41]]
# )Link to this sectionTüm Sınırlayıcı Kutu Dönüşümleri#
from ultralytics.utils.ops import (
ltwh2xywh,
ltwh2xyxy,
xywh2ltwh, # xywh → top-left corner, w, h
xywh2xyxy,
xywhn2xyxy, # normalized → pixel
xyxy2ltwh, # xyxy → top-left corner, w, h
xyxy2xywhn, # pixel → normalized
)
for func in (ltwh2xywh, ltwh2xyxy, xywh2ltwh, xywh2xyxy, xywhn2xyxy, xyxy2ltwh, xyxy2xywhn):
print(help(func)) # print function docstringsHer fonksiyonun doküman dizisine (docstring) bak veya daha fazlasını okumak için ultralytics.utils.ops referans sayfasını ziyaret et.
Link to this sectionÇizim#
Link to this sectionAçıklama yardımcı araçları#
Ultralytics, çeşitli veri türlerini açıklamak için bir Annotator sınıfı içerir. En iyi şekilde nesne algılama sınırlayıcı kutuları, poz anahtar noktaları ve yönlendirilmiş sınırlayıcı kutular ile kullanılır.
Link to this sectionKutu Açıklaması#
import cv2 as cv
import numpy as np
from ultralytics.utils.plotting import Annotator, colors
names = {
0: "person",
5: "bus",
11: "stop sign",
}
image = cv.imread("ultralytics/assets/bus.jpg")
ann = Annotator(
image,
line_width=None, # default auto-size
font_size=None, # default auto-size
font="Arial.ttf", # must be ImageFont compatible
pil=False, # use PIL, otherwise uses OpenCV
)
xyxy_boxes = np.array(
[
[5, 22.878, 231.27, 804.98, 756.83], # class-idx x1 y1 x2 y2
[0, 48.552, 398.56, 245.35, 902.71],
[0, 669.47, 392.19, 809.72, 877.04],
[0, 221.52, 405.8, 344.98, 857.54],
[0, 0, 550.53, 63.01, 873.44],
[11, 0.0584, 254.46, 32.561, 324.87],
]
)
for nb, box in enumerate(xyxy_boxes):
c_idx, *box = box
label = f"{str(nb).zfill(2)}:{names.get(int(c_idx))}"
ann.box_label(box, label, color=colors(c_idx, bgr=True))
image_with_bboxes = ann.result()Names can be used from model.names when working with detection results.
Also see the Annotator Reference Page for additional insight.
Link to this sectionUltralytics Tarama (Sweep) Açıklaması#
import cv2
import numpy as np
from ultralytics import YOLO
from ultralytics.solutions.solutions import SolutionAnnotator
from ultralytics.utils.plotting import colors
# User defined video path and model file
cap = cv2.VideoCapture("path/to/video.mp4")
model = YOLO(model="yolo26s-seg.pt") # Model file, e.g., yolo26s.pt or yolo26m-seg.pt
if not cap.isOpened():
print("Error: Could not open video.")
exit()
# Initialize the video writer object.
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
video_writer = cv2.VideoWriter("ultralytics.avi", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
masks = None # Initialize variable to store masks data
f = 0 # Initialize frame count variable for enabling mouse event.
line_x = w # Store width of line.
dragging = False # Initialize bool variable for line dragging.
classes = model.names # Store model classes names for plotting.
window_name = "Ultralytics Sweep Annotator"
def drag_line(event, x, _, flags, param):
"""Mouse callback function to enable dragging a vertical sweep line across the video frame."""
global line_x, dragging
if event == cv2.EVENT_LBUTTONDOWN or (flags & cv2.EVENT_FLAG_LBUTTON):
line_x = max(0, min(x, w))
dragging = True
while cap.isOpened(): # Loop over the video capture object.
ret, im0 = cap.read()
if not ret:
break
f = f + 1 # Increment frame count.
count = 0 # Re-initialize count variable on every frame for precise counts.
results = model.track(im0, persist=True)[0]
if f == 1:
cv2.namedWindow(window_name)
cv2.setMouseCallback(window_name, drag_line)
annotator = SolutionAnnotator(im0)
if results.boxes.is_track:
if results.masks is not None:
masks = [np.array(m, dtype=np.int32) for m in results.masks.xy]
boxes = results.boxes.xyxy.tolist()
track_ids = results.boxes.id.int().cpu().tolist()
clss = results.boxes.cls.cpu().tolist()
for mask, box, cls, t_id in zip(masks or [None] * len(boxes), boxes, clss, track_ids):
color = colors(t_id, True) # Assign different color to each tracked object.
label = f"{classes[cls]}:{t_id}"
if mask is not None and mask.size > 0:
if box[0] > line_x:
count += 1
cv2.polylines(im0, [mask], True, color, 2)
x, y = mask.min(axis=0)
(w_m, _), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
cv2.rectangle(im0, (x, y - 20), (x + w_m, y), color, -1)
cv2.putText(im0, label, (x, y - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)
else:
if box[0] > line_x:
count += 1
annotator.box_label(box=box, color=color, label=label)
# Generate draggable sweep line
annotator.sweep_annotator(line_x=line_x, line_y=h, label=f"COUNT:{count}")
cv2.imshow(window_name, im0)
video_writer.write(im0)
if cv2.waitKey(1) & 0xFF == ord("q"):
break
# Release the resources
cap.release()
video_writer.release()
cv2.destroyAllWindows()sweep_annotator yöntemi hakkında ek ayrıntıları referans bölümümüzde burada bulabilirsin.
Link to this sectionUyarlanabilir Etiket Açıklaması#
Ultralytics v8.3.167'den itibaren circle_label ve text_label yerini birleşik bir adaptive_label fonksiyonuna bıraktı. Artık shape argümanını kullanarak açıklama türünü belirleyebilirsin:
- Dikdörtgen:
annotator.adaptive_label(box, label=names[int(cls)], color=colors(cls, True), shape="rect") - Daire:
annotator.adaptive_label(box, label=names[int(cls)], color=colors(cls, True), shape="circle")
Watch: In-Depth Guide to Text & Circle Annotations with Python Live Demos | Ultralytics Annotations 🚀
import cv2
from ultralytics import YOLO
from ultralytics.solutions.solutions import SolutionAnnotator
from ultralytics.utils.plotting import colors
model = YOLO("yolo26s.pt")
names = model.names
cap = cv2.VideoCapture("path/to/video.mp4")
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
writer = cv2.VideoWriter("Ultralytics circle annotation.avi", cv2.VideoWriter_fourcc(*"MJPG"), fps, (w, h))
while True:
ret, im0 = cap.read()
if not ret:
break
annotator = SolutionAnnotator(im0)
results = model.predict(im0)[0]
boxes = results.boxes.xyxy.cpu()
clss = results.boxes.cls.cpu().tolist()
for box, cls in zip(boxes, clss):
annotator.adaptive_label(box, label=names[int(cls)], color=colors(cls, True), shape="circle")
writer.write(im0)
cv2.imshow("Ultralytics circle annotation", im0)
if cv2.waitKey(1) & 0xFF == ord("q"):
break
writer.release()
cap.release()
cv2.destroyAllWindows()Ek bilgi için SolutionAnnotator Referans Sayfasına göz at.
Link to this sectionÇeşitli#
Link to this sectionKod Profilleme#
Kodun çalışması/işlenmesi için geçen süreyi with kullanarak veya bir dekoratör olarak kontrol et.
from ultralytics.utils.ops import Profile
with Profile(device="cuda:0") as dt:
pass # operation to measure
print(dt)
# >>> "Elapsed time is 9.5367431640625e-07 s"Link to this sectionUltralytics Desteklenen Formatlar#
Ultralytics'te desteklenen görüntü veya video formatlarını programatik olarak kullanman mı gerekiyor? Gerekirse bu sabitleri kullan:
from ultralytics.data.utils import IMG_FORMATS, VID_FORMATS
print(IMG_FORMATS)
# {'avif', 'bmp', 'dng', 'heic', 'heif', 'jp2', 'jpeg', 'jpg', 'mpo', 'png', 'tif', 'tiff', 'webp'}
print(VID_FORMATS)
# {'asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'ts', 'wmv', 'webm'}Link to this sectionBölünebilir Yap#
x'ten büyük veya ona eşit olan ve y'ye tam bölünebilen en küçük tam sayıyı hesapla.
from ultralytics.utils.ops import make_divisible
make_divisible(7, 3)
# >>> 9
make_divisible(7, 2)
# >>> 8Link to this sectionSSS#
Link to this sectionMakine öğrenimi iş akışlarını geliştirmek için Ultralytics paketinde hangi yardımcı araçlar yer almaktadır?#
Ultralytics paketi, makine öğrenimi iş akışlarını kolaylaştırmak ve optimize etmek için tasarlanmış yardımcı araçlar içerir. Temel yardımcı araçlar arasında veri kümelerini etiketlemek için otomatik açıklama, COCO verilerini convert_coco ile YOLO formatına dönüştürme, görüntüleri sıkıştırma ve veri kümesini otomatik bölme işlemleri yer alır. Bu araçlar manuel çabayı azaltır, tutarlılığı sağlar ve veri işleme verimliliğini artırır.
Link to this sectionVeri setimi otomatik etiketlemek için Ultralytics'i nasıl kullanabilirim?#
Eğer önceden eğitilmiş bir Ultralytics YOLO nesne algılama modelin varsa, veri setini segmentasyon formatında otomatik etiketlemek için bunu SAM modeliyle birlikte kullanabilirsin. İşte bir örnek:
from ultralytics.data.annotator import auto_annotate
auto_annotate(
data="path/to/new/data",
det_model="yolo26n.pt",
sam_model="mobile_sam.pt",
device="cuda",
output_dir="path/to/save_labels",
)Daha fazla ayrıntı için auto_annotate referans bölümüne göz at veya barındırılan, kod gerektirmeyen bir alternatif olarak Ultralytics Platform'u kullan; bu platform SAM 2.1 veya SAM 3 aracılığıyla tıklama tabanlı maskeleme veya önceden eğitilmiş ve ince ayar yapılmış YOLO modellerinden algılama, segmentasyon ve OBB görevleri için tahminler sunar.
Link to this sectionUltralytics'te COCO veri seti açıklamalarını YOLO formatına nasıl dönüştürürüm?#
COCO JSON açıklamalarını nesne algılama için YOLO formatına dönüştürmek amacıyla convert_coco yardımcı aracını kullanabilirsin. İşte bir örnek kod parçası:
from ultralytics.data.converter import convert_coco
convert_coco(
"coco/annotations/",
use_segments=False,
use_keypoints=False,
cls91to80=True,
)Ek bilgi için convert_coco referans sayfasını ziyaret et.
Link to this sectionVeri seti kompozisyonumu ve dağılımımı nasıl analiz edebilirim?#
Ultralytics Platform, otomatik veri seti analitiği sunar: Charts (Grafikler) sekmesi, bölme dağılımını, en üst sınıf sayılarını, görüntü boyutu histogramlarını ve açıklama konumlarının 2D ısı haritalarını göstererek eğitimden önce dengesizlikleri ve aykırı değerleri tespit etmene yardımcı olur.
Link to this sectionUltralytics'te sınırlayıcı kutuları segmentlere nasıl dönüştürebilirim?#
Mevcut sınırlayıcı kutu verilerini (x y w h formatında) segmentlere dönüştürmek için yolo_bbox2segment fonksiyonunu kullanabilirsin. Dosyalarının görüntüler ve etiketler için ayrı dizinlerle düzenlendiğinden emin ol.
from ultralytics.data.converter import yolo_bbox2segment
yolo_bbox2segment(
im_dir="path/to/images",
save_dir=None, # saved to "labels-segment" in the images directory
sam_model="sam_b.pt",
)Daha fazla bilgi için yolo_bbox2segment referans sayfasını ziyaret et.