包裹分割数据集
![]()
包裹 segment 数据集是一个精心策划的图像集合,专为 计算机视觉领域中与包裹 segment 相关的任务量身定制。该数据集旨在帮助研究人员、开发人员和爱好者从事涉及包裹识别、分拣和处理的项目,主要侧重于 图像 segment 任务。
观看: 使用 Ultralytics YOLO26 训练包裹分割模型 | 工业包裹 🎉
该数据集包含展示不同环境和上下文中各种包裹的图像,是训练和评估分割模型的宝贵资源。无论您从事物流、仓库自动化还是任何需要精确包裹分析的应用,包裹分割数据集都提供了一组有针对性的全面图像,以增强您的计算机视觉算法的性能。在我们的数据集概述页面上探索更多用于分割任务的数据集。
数据集结构
Package Segmentation Dataset 中的数据分布结构如下:
- 训练集: 包含 1920 张图像及其相应的注释。
- 测试集: 包含 89 张图像,每张图像都配有各自的标注。
- 验证集: 包含 188 张图像,每张图像都有相应的注释。
应用
由 Package Segmentation Dataset 提供的支持的包裹分割对于优化物流、改善最后一公里交付、提高制造质量控制以及为智慧城市解决方案做出贡献至关重要。从电子商务到安全应用,该数据集是一项关键资源,可促进计算机视觉在各种高效包裹分析应用中的创新。
智能仓库和物流
在现代仓库中,视觉 AI 解决方案 可以通过自动化包裹识别和分拣来简化操作。在此数据集上训练的计算机视觉模型可以实时快速 detect 和 segment 包裹,即使在光线昏暗或空间杂乱的挑战性环境中也能做到。这可以缩短处理时间、减少错误,并提高 物流运营 的整体效率。
质量控制和损伤检测
通过分析包裹的形状和外观,可以使用包裹分割模型来识别损坏的包裹。通过检测包裹轮廓中的不规则或变形,这些模型有助于确保只有完好无损的包裹才能通过供应链,从而减少客户投诉和退货率。这是制造业质量控制的一个关键方面,对于维护产品完整性至关重要。
数据集 YAML
YAML(Yet Another Markup Language)文件定义了数据集配置,包括路径、类和其他基本详细信息。对于 Package Segmentation 数据集, package-seg.yaml 文件保存在 https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/package-seg.yaml.
Ultralytics/cfg/datasets/包裹分割.yaml
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Package-seg dataset by Ultralytics
# Documentation: https://docs.ultralytics.com/datasets/segment/package-seg/
# Example usage: yolo train data=package-seg.yaml
# parent
# ├── ultralytics
# └── datasets
# └── package-seg ← downloads here (103 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: package-seg # dataset root dir
train: images/train # train images (relative to 'path') 1920 images
val: images/val # val images (relative to 'path') 89 images
test: images/test # test images (relative to 'path') 188 images
# Classes
names:
0: package
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/package-seg.zip
用法
要在包裹分割数据集上训练一个图像大小为 640、迭代 100 个 epochs 的 Ultralytics YOLO26n 模型,您可以使用以下代码片段。有关可用参数的完整列表,请参阅模型 训练页面。
训练示例
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n-seg.pt") # load a pretrained segmentation model (recommended for training)
# Train the model on the Package Segmentation dataset
results = model.train(data="package-seg.yaml", epochs=100, imgsz=640)
# Validate the model
results = model.val()
# Perform inference on an image
results = model("path/to/image.jpg")
# Load a pretrained segmentation model and start training
yolo segment train data=package-seg.yaml model=yolo26n-seg.pt epochs=100 imgsz=640
# Resume training from the last checkpoint
yolo segment train data=package-seg.yaml model=path/to/last.pt resume=True
# Validate the trained model
yolo segment val data=package-seg.yaml model=path/to/best.pt
# Perform inference using the trained model
yolo segment predict model=path/to/best.pt source=path/to/image.jpg
样本数据和注释
包裹分割数据集包含从多个角度捕获的各种图像集合。以下是数据集中数据的实例,以及它们各自的分割掩码:
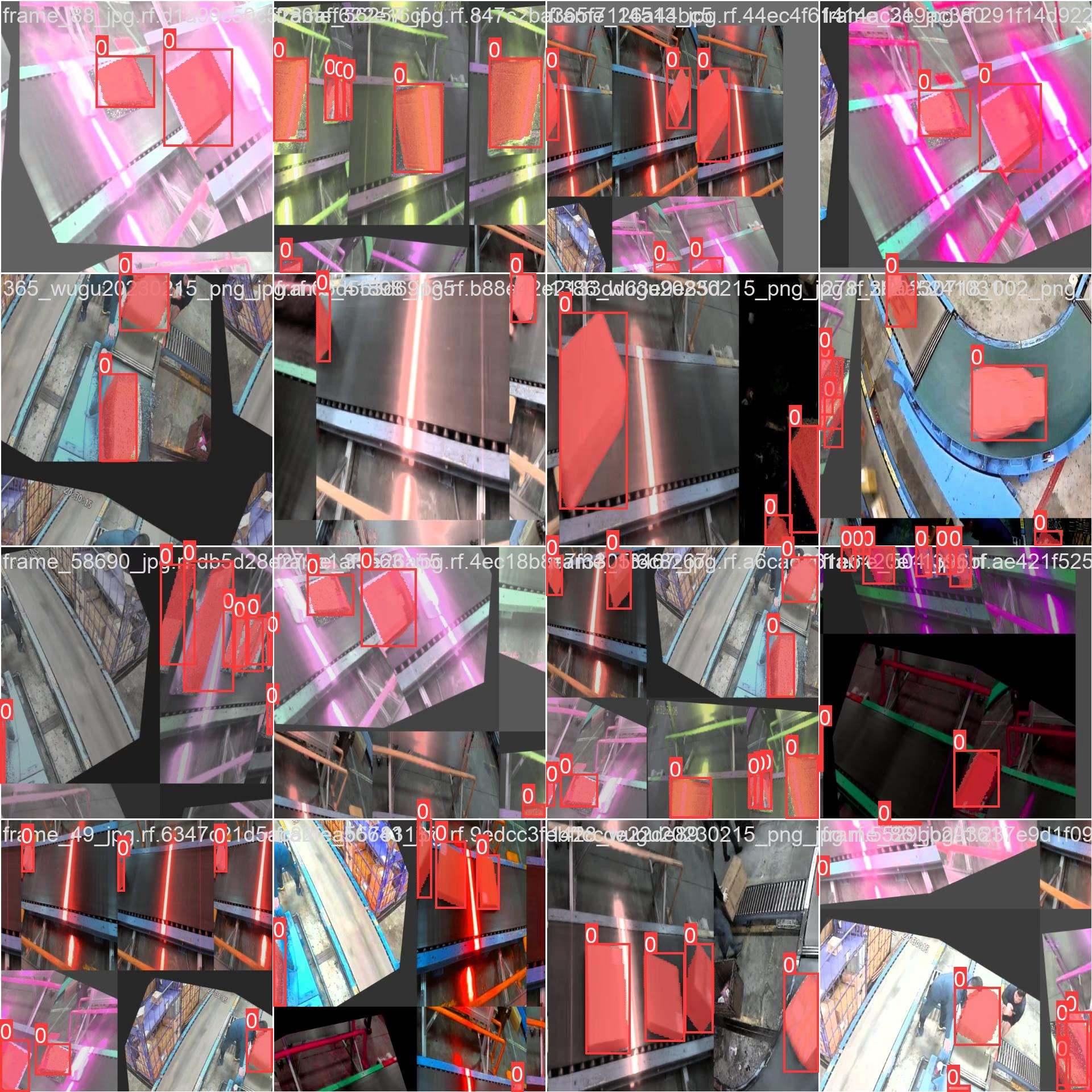
- 此图展示了一个包装分割的实例,其中包含带注释的掩码,用于勾勒出已识别的包装对象。该数据集包含在不同位置、环境和密度下拍摄的各种图像集合。它作为开发特定于此分割任务的模型的综合资源。
- 该示例强调了数据集中存在的多样性和复杂性,突出了高质量数据对于涉及包分割的计算机视觉任务的重要性。
使用 YOLO26 进行包裹分割的优势
Ultralytics YOLO26 为包裹分割任务提供了多项优势:
速度与精度平衡:YOLO26 实现了高精度和高效率,使其成为快节奏物流环境中进行 real-time inference 的理想选择。与 YOLOv8 等模型相比,它提供了强大的平衡。
适应性:使用 YOLO26 训练的模型能够适应各种仓库条件,从昏暗的光线到杂乱的空间,确保稳健的性能。
可扩展性:在节假日等高峰期,YOLO26 模型可以高效扩展以处理增加的包裹量,同时不影响性能或 accuracy。
集成能力:YOLO26 可以轻松与现有仓库管理系统集成,并使用 ONNX 或 TensorRT 等格式部署到各种平台,从而促进端到端自动化解决方案的实现。
引用和致谢
如果您将 Package Segmentation 数据集整合到您的研究或开发计划中,请适当引用来源:
@misc{ factory_package_dataset,
title = { factory_package Dataset },
type = { Open Source Dataset },
author = { factorypackage },
url = { https://universe.roboflow.com/factorypackage/factory_package },
year = { 2024 },
month = { jan },
note = { visited on 2024-01-24 },
}
我们感谢 Package Segmentation 数据集的创建者为计算机视觉社区做出的贡献。要进一步探索数据集和模型训练,请考虑访问我们的 Ultralytics 数据集 页面和我们的 模型训练技巧 指南。
常见问题
什么是包裹分割数据集?它如何帮助计算机视觉项目?
- 包裹分割数据集是一个精选的图像集合,专为涉及包裹图像分割的任务而定制。它包括各种上下文中包裹的多样化图像,使其对于训练和评估分割模型非常宝贵。此数据集对于物流、仓库自动化以及任何需要精确包裹分析的项目特别有用。
如何在包裹分割数据集上训练 Ultralytics YOLO26 模型?
- 您可以使用 python 和 CLI 方法训练 Ultralytics YOLO26 模型。请使用 用法 部分提供的代码片段。有关参数和配置的更多详细信息,请参阅模型 训练页面。
Package Segmentation 数据集的组成部分是什么?它的结构是怎样的?
- 该数据集主要由三个部分组成:
- 训练集: 包含 1920 张带有注释的图像。
- 测试集: 包含 89 张带有相应标注的图像。
- 验证集: 包括 188 张带有注释的图像。
- 这种结构确保了用于全面模型训练、验证和测试的平衡数据集,遵循模型评估指南中概述的最佳实践。
为什么我应该将 Ultralytics YOLO26 与包裹分割数据集一起使用?
- Ultralytics YOLO26 为实时 object detection 和分割任务提供了最先进的 accuracy 和速度。将其与包裹分割数据集结合使用,可以利用 YOLO26 的能力进行精确的包裹分割,这对于 logistics 和仓储自动化等行业尤其有利。
如何访问和使用 Package Segmentation Dataset 的 package-seg.yaml 文件?
- 字段
package-seg.yaml该文件托管在 Ultralytics 的 GitHub 仓库中,包含关于数据集路径、类别和配置的重要信息。您可以在以下位置查看或下载: https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/package-seg.yaml。此文件对于配置您的模型以有效利用数据集至关重要。要了解更多见解和实际示例,请浏览我们的 Python 用法 部分。






