Link to this sectionEstimativa de velocidade usando Ultralytics YOLO26 🚀#
Link to this sectionO que é estimativa de velocidade?#
A estimativa de velocidade é o processo de calcular a taxa de movimento de um objeto dentro de um determinado contexto, frequentemente empregado em aplicações de visão computacional. Usando o Ultralytics YOLO26, podes agora calcular a velocidade de objetos usando rastreamento de objetos juntamente com dados de distância e tempo, algo crucial para tarefas como monitoramento de tráfego e vigilância. A precisão da estimativa de velocidade influencia diretamente a eficiência e a confiabilidade de várias aplicações, tornando-a um componente chave no avanço de sistemas inteligentes e processos de tomada de decisão em tempo real.
Watch: Speed Estimation using Ultralytics YOLO26
Para insights mais profundos sobre estimativa de velocidade, confere a nossa publicação no blog: Ultralytics YOLO para Estimativa de Velocidade em Projetos de Visão Computacional
Link to this sectionVantagens da estimativa de velocidade#
- Controle de Tráfego Eficiente: A estimativa precisa de velocidade ajuda a gerir o fluxo de tráfego, aumentando a segurança e reduzindo congestionamentos nas vias.
- Navegação Autónoma Precisa: Em sistemas autónomos como carros de condução autónoma, a estimativa fiável de velocidade garante uma navegação de veículos segura e precisa.
- Segurança de Vigilância Aprimorada: A estimativa de velocidade em análises de vigilância ajuda a identificar comportamentos incomuns ou ameaças potenciais, melhorando a eficácia das medidas de segurança.
Link to this sectionAplicações no mundo real#
| Transporte | Transporte |
|---|---|
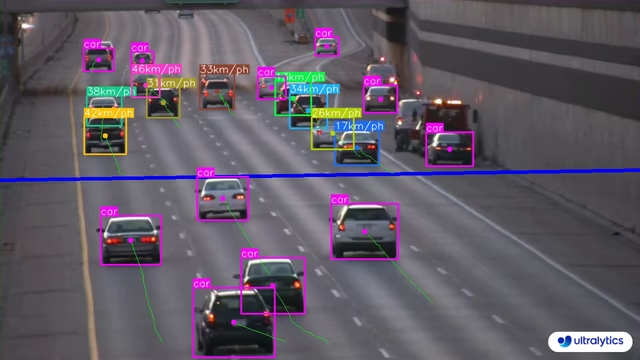 | 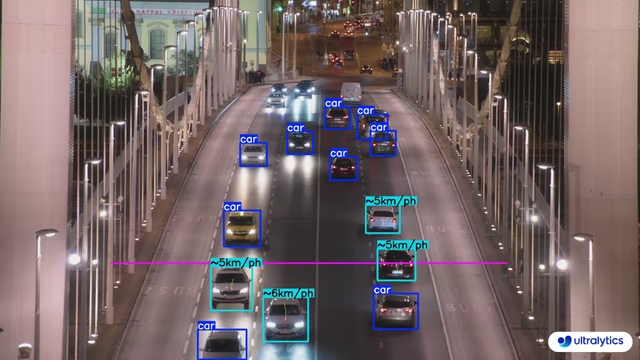 |
| Estimativa de velocidade na estrada usando Ultralytics YOLO26 | Estimativa de velocidade na ponte usando Ultralytics YOLO26 |
A velocidade é uma estimativa
A velocidade será uma estimativa e pode não ser completamente precisa. Além disso, a estimativa pode variar dependendo das especificações da câmera e fatores relacionados.
Link to this sectionEstima a velocidade com o YOLO26#
A solução SpeedEstimator rastreia cada objeto entre os quadros e converte o seu deslocamento em píxeis numa velocidade usando a taxa de fotogramas do vídeo (fps) e uma escala do mundo real (meter_per_pixel). Ajusta o meter_per_pixel para a configuração da tua câmara e usa o max_speed para limitar valores discrepantes de rastreios ruidosos.
# Run a speed example
yolo solutions speed show=True
# Pass a source video
yolo solutions speed source="path/to/video.mp4"
# Adjust meter per pixel value based on camera configuration
yolo solutions speed meter_per_pixel=0.05Link to this sectionArgumentos do SpeedEstimator#
Aqui está uma tabela com os argumentos do SpeedEstimator:
| Argumento | Tipo | Predefinição | Descrição |
|---|---|---|---|
model | str | None | Caminho para um ficheiro de modelo YOLO da Ultralytics. |
fps | float | 30.0 | Frames por segundo usados para cálculos de velocidade. |
max_hist | int | 5 | Pontos históricos máximos a rastrear por objeto para cálculos de velocidade/direção. |
meter_per_pixel | float | 0.05 | Fator de escala usado para converter a distância em píxeis para unidades do mundo real. |
max_speed | int | 120 | Limite de velocidade máxima em sobreposições visuais (usado em alertas). |
A solução SpeedEstimator permite o uso de parâmetros de track:
| Argumento | Tipo | Predefinição | Descrição |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | Especifica o algoritmo de rastreamento a ser usado. As opções integradas são: botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | Define o limiar de confiança para as deteções; valores mais baixos permitem que mais objetos sejam rastreados, mas podem incluir falsos positivos. |
iou | float | 0.7 | Define o limiar de Intersection over Union (IoU) para filtrar deteções sobrepostas. |
classes | list | None | Filtra resultados por índice de classe. Por exemplo, classes=[0, 2, 3] rastreia apenas as classes especificadas. |
verbose | bool | True | Controla a exibição dos resultados de rastreio, fornecendo uma saída visual dos objetos rastreados. |
device | str | None | Especifica o dispositivo para inferência (p. ex., cpu, cuda:0 ou 0). Permite aos utilizadores selecionar entre CPU, uma GPU específica ou outros dispositivos de computação para a execução do modelo. |
Adicionalmente, as seguintes opções de visualização são suportadas:
| Argumento | Tipo | Predefinição | Descrição |
|---|---|---|---|
show | bool | False | Se True, exibe as imagens ou vídeos anotados numa janela. Útil para feedback visual imediato durante o desenvolvimento ou teste. |
line_width | int or None | None | Especifica a largura da linha das caixas delimitadoras. Se None, a largura da linha é ajustada automaticamente com base no tamanho da imagem. Proporciona personalização visual para maior clareza. |
show_conf | bool | True | Exibe a pontuação de confiança para cada detecção ao lado do rótulo. Fornece uma visão sobre a certeza do modelo para cada detecção. |
show_labels | bool | True | Exibe rótulos para cada detecção na saída visual. Fornece compreensão imediata dos objetos detectados. |
Link to this sectionFAQ#
Link to this sectionComo estimo a velocidade de objetos usando o Ultralytics YOLO26?#
Estimar a velocidade de objetos com o Ultralytics YOLO26 combina deteção de objetos e rastreio. O modelo deteta objetos em cada quadro, rastreia-os entre quadros e converte a distância percorrida entre quadros numa velocidade usando a taxa de fotogramas e a escala meter_per_pixel. O exemplo em Python acima executa este pipeline completo — passa o teu vídeo e ajusta o meter_per_pixel para a tua câmara. Para mais informações, consulta a nossa publicação oficial no blog.
Link to this sectionQuais são os benefícios de usar o Ultralytics YOLO26 para estimativa de velocidade na gestão de tráfego?#
Usar o Ultralytics YOLO26 para estimativa de velocidade oferece vantagens significativas na gestão de tráfego:
- Segurança Aprimorada: Estima com precisão as velocidades dos veículos para detectar excesso de velocidade e melhorar a segurança rodoviária.
- Monitoramento em Tempo Real: Beneficia da capacidade de detecção de objetos em tempo real do YOLO26 para monitorar o fluxo de tráfego e o congestionamento de forma eficaz.
- Escalabilidade: Implanta o modelo em diversas configurações de hardware, desde dispositivos de borda até servidores, garantindo soluções flexíveis e escaláveis para implementações em larga escala.
Para mais aplicações, vê as vantagens da estimativa de velocidade.
Link to this sectionO YOLO26 pode ser integrado com outros frameworks de IA como TensorFlow ou PyTorch?#
Sim, o YOLO26 pode ser integrado com outros frameworks de IA como TensorFlow e PyTorch. A Ultralytics fornece suporte para exportar modelos YOLO26 para vários formatos como ONNX, TensorRT e CoreML, garantindo uma interoperabilidade fluida com outros frameworks de ML.
Para exportar um modelo YOLO26 para o formato ONNX:
yolo export model=yolo26n.pt format=onnxAprende mais sobre a exportação de modelos no nosso guia sobre exportação.
Link to this sectionQuão precisa é a estimativa de velocidade usando o Ultralytics YOLO26?#
A precisão da estimativa de velocidade usando o Ultralytics YOLO26 depende de vários fatores, incluindo a qualidade do rastreamento de objetos, a resolução e a taxa de frames do vídeo, e variáveis ambientais. Embora o estimador de velocidade forneça estimativas confiáveis, pode não ser 100% preciso devido a variações na velocidade de processamento de frames e oclusão de objetos.
Nota: Considera sempre a margem de erro e valida as estimativas com dados de referência (ground truth) sempre que possível.
Para mais dicas de melhoria de precisão, confere a secção de Argumentos do SpeedEstimator.