Link to this sectionJeu de données Dog-Pose#
Link to this sectionIntroduction#
Le jeu de données Ultralytics Dog-Pose est un ensemble de données complet et de haute qualité, spécialement conçu pour l'estimation des points clés canins, fournissant 6 773 images d'entraînement et 1 703 images de validation.
Watch: How to Train an Ultralytics YOLO Model on the Stanford Dog Pose Estimation Dataset | Step-by-Step Tutorial
Chaque image annotée comprend 24 points clés avec 3 dimensions par point clé (x, y, visibilité), ce qui en fait une ressource précieuse pour la recherche avancée et le développement en vision par ordinateur.
Pour une race spécifique ou un animal différent, la plateforme Ultralytics gère le téléchargement, l'étiquetage et l'entraînement d'un modèle de points clés personnalisé sur tes propres données sans que tu aies à gérer l'infrastructure.
Link to this sectionStructure du jeu de données#
-
Nombre total d'images : 8 476 (6 773 train / 1 703 val) avec des fichiers d'étiquettes au format YOLO correspondants.
-
Points clés : 24 par chien avec des triplets
(x, y, visibility). -
Taille du téléchargement : ~337 Mo.
-
Mise en page :
datasets/dog-pose/ ├── images/{train,val} └── labels/{train,val}
Link to this sectionYAML du jeu de données#
Un fichier YAML est utilisé pour définir la configuration du jeu de données. Il inclut les chemins, les détails des points clés et d'autres informations pertinentes. Dans le cas du jeu de données Dog-Pose, le fichier dog-pose.yaml est disponible sur https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/dog-pose.yaml.
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Dogs dataset http://vision.stanford.edu/aditya86/ImageNetDogs/ by Stanford
# Documentation: https://docs.ultralytics.com/datasets/pose/dog-pose
# Example usage: yolo train data=dog-pose.yaml
# parent
# ├── ultralytics
# └── datasets
# └── dog-pose ← downloads here (337 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: dog-pose # dataset root dir
train: images/train # train images (relative to 'path') 6773 images
val: images/val # val images (relative to 'path') 1703 images
# Keypoints
kpt_shape: [24, 3] # number of keypoints, number of dims (2 for x,y or 3 for x,y,visible)
# Classes
names:
0: dog
# Keypoint names per class
kpt_names:
0:
- front_left_paw
- front_left_knee
- front_left_elbow
- rear_left_paw
- rear_left_knee
- rear_left_elbow
- front_right_paw
- front_right_knee
- front_right_elbow
- rear_right_paw
- rear_right_knee
- rear_right_elbow
- tail_start
- tail_end
- left_ear_base
- right_ear_base
- nose
- chin
- left_ear_tip
- right_ear_tip
- left_eye
- right_eye
- withers
- throat
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/dog-pose.zipLink to this sectionUtilisation#
Pour entraîner un modèle YOLO26n-pose sur le jeu de données Dog-Pose pendant 100 époques avec une taille d'image de 640, tu peux utiliser les extraits de code suivants. Pour une liste exhaustive des arguments disponibles, consulte la page Entraînement du modèle.
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n-pose.pt") # load a pretrained model (recommended for training)
# Train the model
results = model.train(data="dog-pose.yaml", epochs=100, imgsz=640)Link to this sectionExemples d'images et annotations#
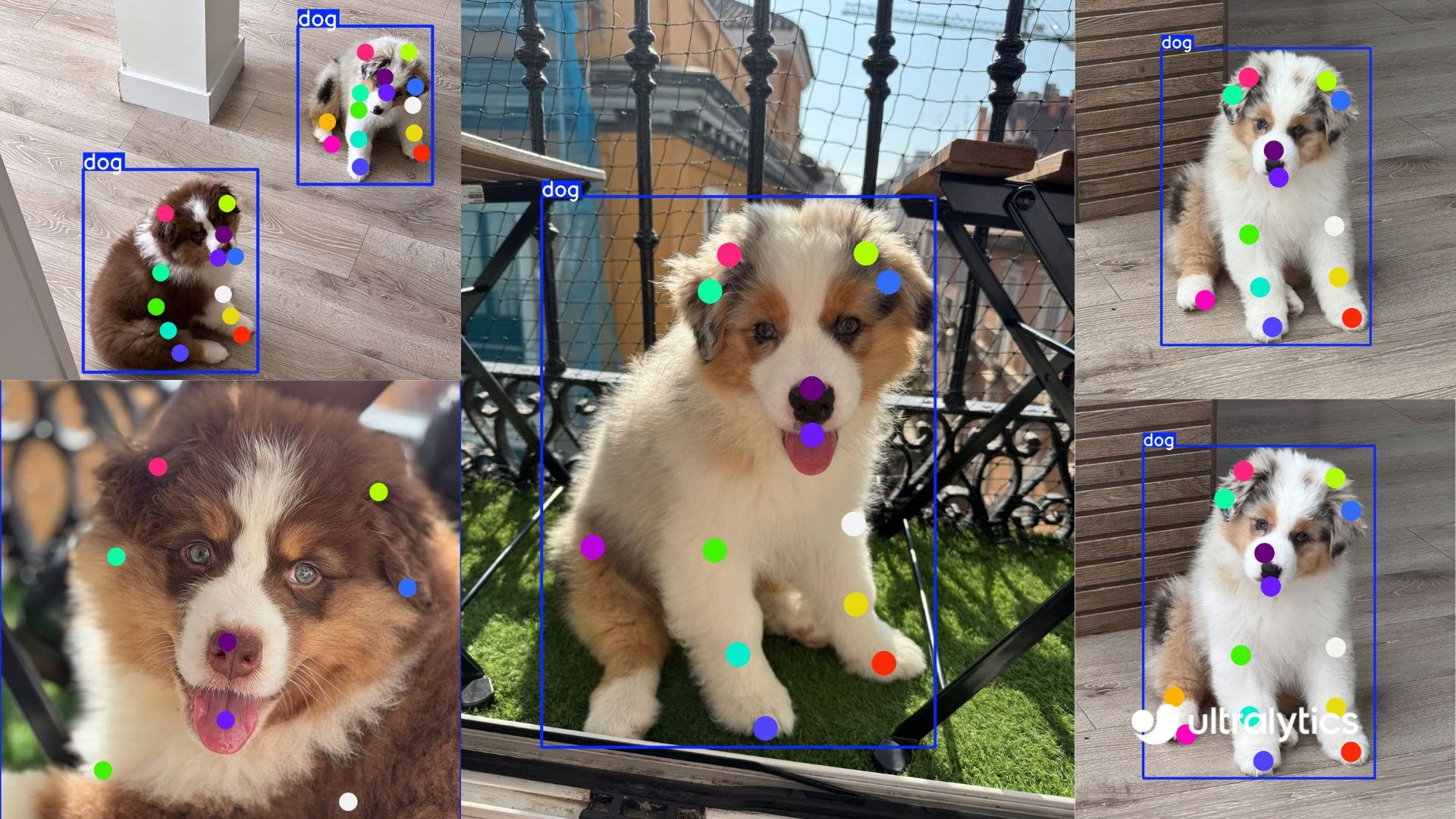
Voici quelques exemples d'images issues du jeu de données Dog-Pose, accompagnées de leurs annotations correspondantes :
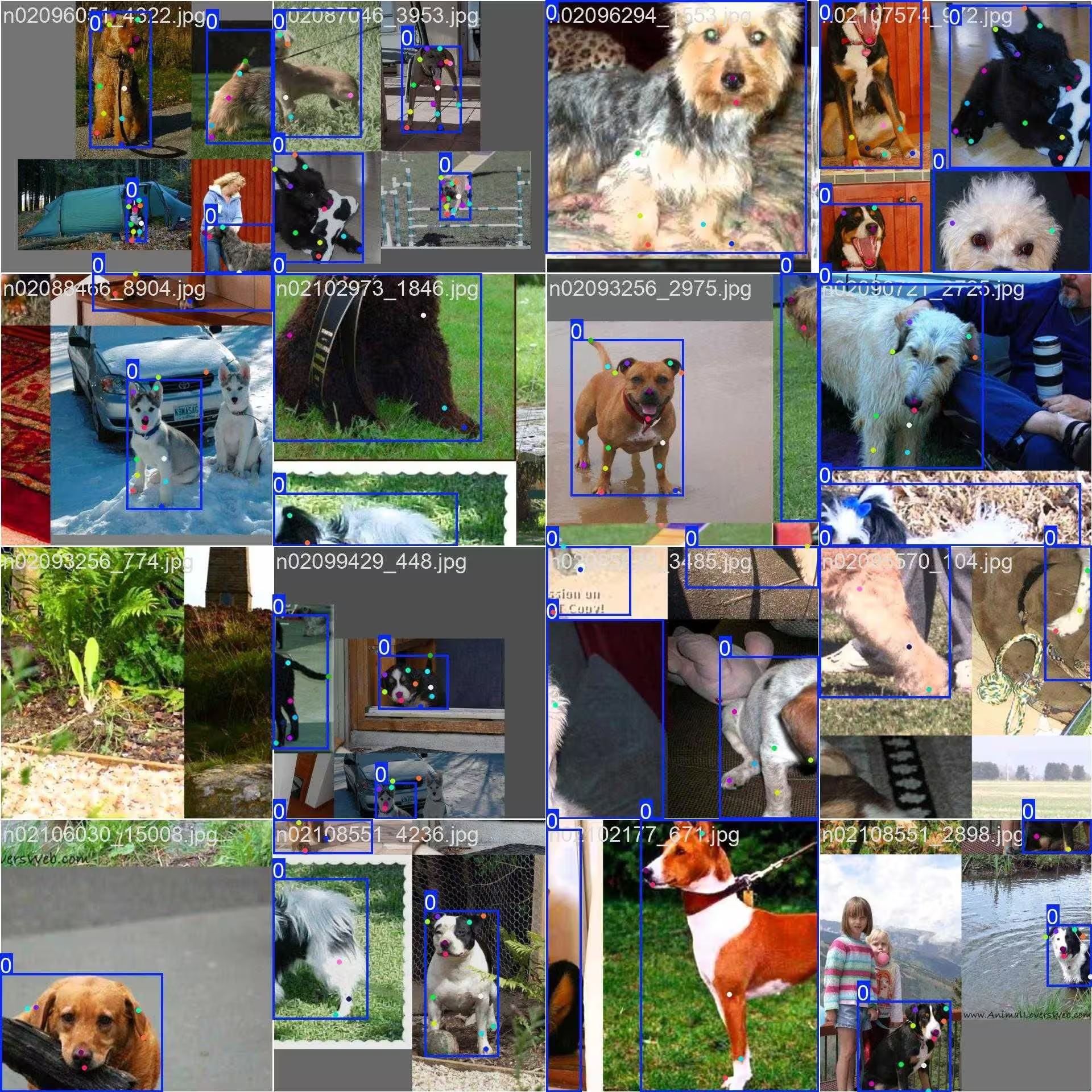
- Image mosaïquée : Cette image montre un lot d'entraînement composé d'images du jeu de données mosaïquées. La mosaïque est une technique utilisée pendant l'entraînement qui combine plusieurs images en une seule pour augmenter la variété des objets et des scènes au sein de chaque lot d'entraînement. Cela aide à améliorer la capacité du modèle à généraliser à différentes tailles d'objets, ratios d'aspect et contextes.
L'exemple met en évidence la variété et la complexité des images du jeu de données Dog-Pose ainsi que les avantages de l'utilisation du mosaïquage lors du processus d'entraînement.
Link to this sectionCitations et remerciements#
Si tu utilises le jeu de données Dog-Pose dans tes travaux de recherche ou de développement, merci de citer l'article suivant :
@inproceedings{khosla2011fgvc,
title={Novel dataset for Fine-Grained Image Categorization},
author={Aditya Khosla and Nityananda Jayadevaprakash and Bangpeng Yao and Li Fei-Fei},
booktitle={First Workshop on Fine-Grained Visual Categorization (FGVC), IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2011}
}
@inproceedings{deng2009imagenet,
title={ImageNet: A Large-Scale Hierarchical Image Database},
author={Jia Deng and Wei Dong and Richard Socher and Li-Jia Li and Kai Li and Li Fei-Fei},
booktitle={IEEE Computer Vision and Pattern Recognition (CVPR)},
year={2009}
}Nous tenons à remercier l'équipe de Stanford pour la création et la maintenance de cette ressource précieuse pour la communauté computer vision. Pour plus d'informations sur le jeu de données Dog-Pose et ses créateurs, visite le site web du Stanford Dogs Dataset.
Link to this sectionFAQ#
Link to this sectionQu'est-ce que le jeu de données Dog-Pose et comment l'utiliser avec YOLO26 d'Ultralytics ?#
Le jeu de données Dog-Pose contient 6 773 images d'entraînement et 1 703 images de validation annotées avec 24 points clés pour l'estimation de la pose canine. Il est conçu pour entraîner et valider des modèles avec Ultralytics YOLO26, prenant en charge des applications comme l'analyse du comportement animal, la surveillance des animaux de compagnie et les études vétérinaires. Les annotations complètes du jeu de données en font un outil idéal pour développer des modèles précis d'estimation de pose pour les chiens.
Link to this sectionComment entraîner un modèle YOLO26 en utilisant le jeu de données Dog-Pose dans Ultralytics ?#
Charge yolo26n-pose.pt et appelle model.train(data="dog-pose.yaml", epochs=100, imgsz=640) — vois l'Exemple d'entraînement ci-dessus pour les extraits complets en Python et CLI, et la page Entraînement du modèle pour une liste complète des arguments.
Link to this sectionQuels sont les avantages de l'utilisation du jeu de données Dog-Pose ?#
Avec un total de 8 476 images (6 773 train / 1 703 val) couvrant un large éventail de races et de poses canines, et 24 points clés en 3 dimensions (x, y, visibilité) par annotation, le jeu de données Dog-Pose offre aux modèles la couverture de scénarios réels nécessaire pour des applications telles que le suivi des animaux de compagnie et l'analyse comportementale. Pour en savoir plus sur ses fonctionnalités et son utilisation, consulte la section Introduction au jeu de données.
Link to this sectionComment le mosaïquage profite-t-il au processus d'entraînement YOLO26 avec le jeu de données Dog-Pose ?#
Le mosaïquage combine plusieurs images Dog-Pose en une seule image d'entraînement, augmentant ainsi la variété des poses, des tailles et des arrière-plans que le modèle voit à chaque étape, ce qui améliore la généralisation à de nouveaux contextes et échelles tout en réduisant le surapprentissage. Pour voir des exemples d'images, reporte-toi à la section Exemples d'images et annotations.
Link to this sectionOù puis-je trouver le fichier YAML du jeu de données Dog-Pose et comment l'utiliser ?#
Le fichier YAML du jeu de données Dog-Pose se trouve à l'adresse https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/dog-pose.yaml. Ce fichier définit la configuration du jeu de données, incluant les chemins, les classes, les détails des points clés et d'autres informations pertinentes. Le YAML spécifie 24 points clés avec 3 dimensions par point clé, ce qui le rend adapté aux tâches détaillées d'estimation de pose.
Pour utiliser ce fichier avec les scripts d'entraînement YOLO26, référence-le simplement dans ta commande d'entraînement comme indiqué dans la section Utilisation. Le jeu de données sera automatiquement téléchargé lors de sa première utilisation, ce qui rend la configuration très simple.
Pour en savoir plus sur les modèles de points clés, consulte la documentation de la tâche Estimation de pose.