Link to this sectionUltralytics Solutions: Utiliza o YOLO26 para Resolver Problemas do Mundo Real#
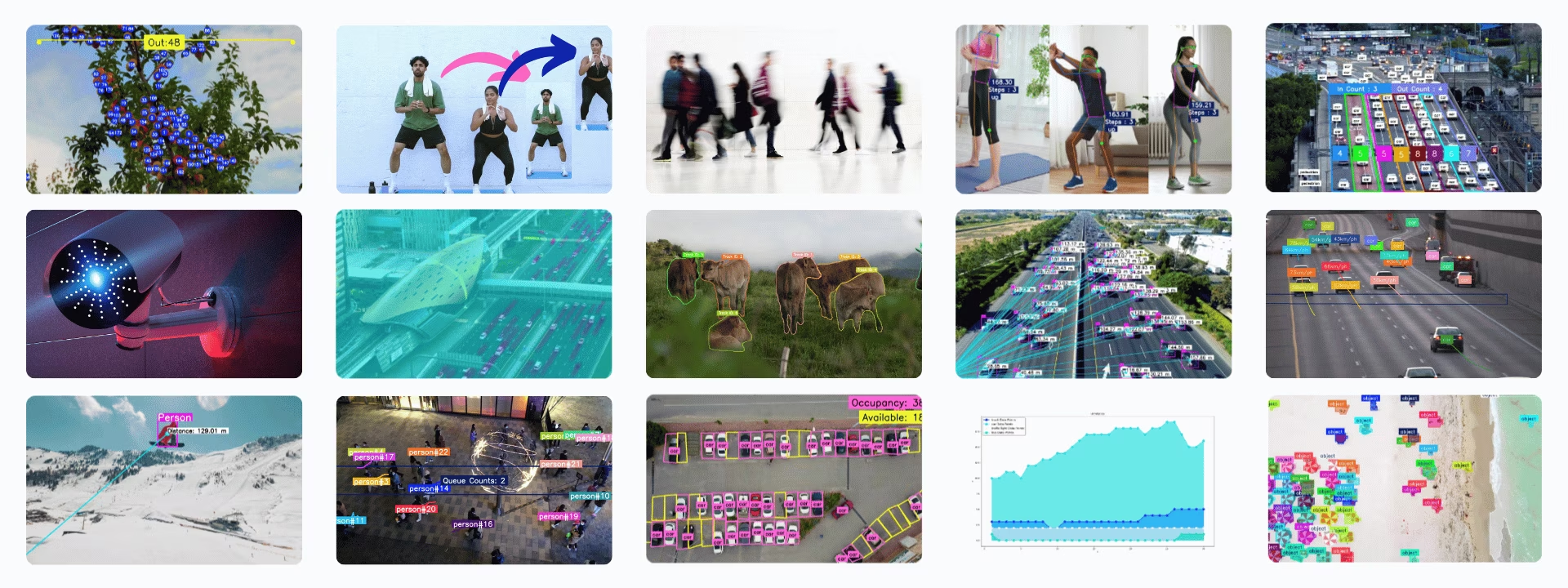
As Ultralytics Solutions fornecem aplicações de ponta dos modelos YOLO, oferecendo soluções do mundo real como contagem de objetos, desfoque e sistemas de segurança, aumentando a eficiência e a precisão em diversos setores. Descobre o poder do YOLO26 para implementações práticas e eficazes.
Watch: How to Run Ultralytics Solutions from the Command Line (CLI) | Ultralytics YOLO26 🚀
Link to this sectionSoluções#
Aqui tens a nossa lista selecionada de soluções Ultralytics que podes usar para criar projetos incríveis de visão computacional.
- Analytics: Conduz uma análise de dados abrangente para descobrir padrões e tomar decisões informadas, aproveitando o YOLO26 para análises descritivas, preditivas e prescritivas.
- Cálculo de Distância: Calcula distâncias entre objetos usando centroides de caixas delimitadoras no YOLO26, essencial para análise espacial.
- Mapas de Calor: Utiliza mapas de calor de deteção para visualizar a intensidade dos dados numa matriz, proporcionando insights claros em tarefas de visão computacional.
- Segmentação de Instância com Rastreio de Objetos: Implementa segmentação de instância e rastreio de objetos com o YOLO26 para obter limites precisos de objetos e monitorização contínua.
- Inferência em Direto com Streamlit: Aproveita o poder do YOLO26 para deteção de objetos em tempo real diretamente através do teu navegador web com uma interface Streamlit intuitiva.
- Desfoque de Objetos: Aplica desfoque de objetos usando o YOLO26 para proteger a privacidade no processamento de imagens e vídeos.
- Contagem de Objetos: Aprende a realizar a contagem de objetos em tempo real com o YOLO26. Ganha a perícia para contar objetos com precisão em streams de vídeo em direto.
- Contagem de Objetos em Regiões: Conta objetos em regiões específicas usando o YOLO26 para uma deteção precisa em áreas variadas.
- Recorte de Objetos: Domina o recorte de objetos com o YOLO26 para uma extração precisa de objetos de imagens e vídeos.
- Gestão de Estacionamento: Organiza e direciona o fluxo de veículos em áreas de estacionamento com o YOLO26, otimizando a utilização do espaço e a experiência do utilizador.
- Gestão de Filas: Implementa sistemas eficientes de gestão de filas para minimizar tempos de espera e melhorar a produtividade usando o YOLO26.
- Sistema de Alarme de Segurança: Cria um sistema de alarme de segurança com o YOLO26 que dispara alertas ao detetar novos objetos. Personaliza o sistema para se adaptar às tuas necessidades específicas.
- Similarity Search: Ativa a recuperação inteligente de imagens combinando embeddings do OpenAI CLIP com a busca por similaridade de cosseno, permitindo consultas em linguagem natural como "pessoa segurando uma bolsa" ou "veículos em movimento."
- Estimativa de Velocidade: Estima a velocidade dos objetos usando o YOLO26 e técnicas de rastreio de objetos, crucial para aplicações como veículos autónomos e monitorização de tráfego.
- Rastreio de Objetos em Zona: Aprende a rastrear objetos dentro de zonas específicas de frames de vídeo usando o YOLO26 para uma monitorização precisa e eficiente.
- Mapeamento de Objetos com VisionEye: Desenvolve sistemas que mimetizam o foco do olho humano em objetos específicos, aumentando a capacidade do computador de discernir e priorizar detalhes.
- Monitorização de Exercícios: Descobre como monitorizar treinos usando o YOLO26. Aprende a rastrear e analisar várias rotinas de fitness em tempo real.
Link to this sectionArgumentos das Soluções#
| Argumento | Tipo | Predefinição | Descrição |
|---|---|---|---|
model | str | None | Caminho para um ficheiro de modelo YOLO da Ultralytics. |
region | list ou dict | None | Pontos que definem a região de interesse, seja uma lista de tuplas (x, y) ou um dicionário que mapeia nomes de regiões para listas de pontos para múltiplas regiões (apenas RegionCounter). Quando None, soluções que exigem uma região retornam a um padrão predefinido. |
show_in | bool | True | Flag para controlar se os números de entrada devem ser exibidos no stream de vídeo. |
show_out | bool | True | Flag para controlar se os números de saída devem ser exibidos no stream de vídeo. |
analytics_type | str | 'line' | Tipo de gráfico, i.e., line, bar, area ou pie. |
colormap | int | cv2.COLORMAP_DEEPGREEN | Mapa de cores a usar para o mapa de calor. |
json_file | str | None | Caminho para o ficheiro JSON que contém todos os dados de coordenadas de estacionamento. |
up_angle | float | 145.0 | Limiar de ângulo para a pose 'cima'. |
kpts | list[int] | '[6, 8, 10]' | Lista de três índices de pontos-chave usados para monitorizar exercícios. Estes pontos-chave correspondem a articulações ou partes do corpo, como ombros, cotovelos e pulsos, para exercícios como flexões, elevações, agachamentos e abdominais. |
down_angle | int | 90 | Limiar de ângulo para a pose 'baixo'. |
blur_ratio | float | 0.5 | Ajusta a percentagem da intensidade do desfoque, com valores no intervalo 0.1 - 1.0. |
crop_dir | str | 'cropped-detections' | Nome do diretório para armazenar deteções recortadas. |
records | int | 5 | Contagem total de deteções para disparar um e-mail com o sistema de alarme de segurança. |
vision_point | tuple[int, int] | (20, 20) | O ponto onde a visão irá rastrear objetos e desenhar caminhos usando a VisionEye Solution. |
source | str | None | Caminho para a fonte de entrada (vídeo, RTSP, etc.). Apenas utilizável com a interface de linha de comandos (CLI) das Solutions. |
figsize | tuple[float, float] | (12.8, 7.2) | Tamanho da figura para gráficos de análise como mapas de calor ou gráficos. |
fps | float | 30.0 | Frames por segundo usados para cálculos de velocidade. |
max_hist | int | 5 | Pontos históricos máximos a rastrear por objeto para cálculos de velocidade/direção. |
meter_per_pixel | float | 0.05 | Fator de escala usado para converter a distância em píxeis para unidades do mundo real. |
max_speed | int | 120 | Limite de velocidade máxima em sobreposições visuais (usado em alertas). |
data | str | 'images' | Caminho para o diretório de imagens usado para pesquisa de similaridade. |
imgsz | int | 640 | Tamanho da imagem de entrada para inferência do modelo. |
As Solutions também suportam alguns dos argumentos de track, incluindo parâmetros como conf, line_width, tracker, model, show, verbose e classes.
| Argumento | Tipo | Predefinição | Descrição |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | Especifica o algoritmo de rastreamento a ser usado. As opções integradas são: botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | Define o limiar de confiança para as deteções; valores mais baixos permitem que mais objetos sejam rastreados, mas podem incluir falsos positivos. |
iou | float | 0.7 | Define o limiar de Intersection over Union (IoU) para filtrar deteções sobrepostas. |
classes | list | None | Filtra resultados por índice de classe. Por exemplo, classes=[0, 2, 3] rastreia apenas as classes especificadas. |
verbose | bool | True | Controla a exibição dos resultados de rastreio, fornecendo uma saída visual dos objetos rastreados. |
device | str | None | Especifica o dispositivo para inferência (p. ex., cpu, cuda:0 ou 0). Permite aos utilizadores selecionar entre CPU, uma GPU específica ou outros dispositivos de computação para a execução do modelo. |
Podes usar show_conf, show_labels e outros argumentos mencionados para personalizar a visualização.
| Argumento | Tipo | Predefinição | Descrição |
|---|---|---|---|
show | bool | False | Se True, exibe as imagens ou vídeos anotados numa janela. Útil para feedback visual imediato durante o desenvolvimento ou teste. |
line_width | int or None | None | Especifica a largura da linha das caixas delimitadoras. Se None, a largura da linha é ajustada automaticamente com base no tamanho da imagem. Proporciona personalização visual para maior clareza. |
show_conf | bool | True | Exibe a pontuação de confiança para cada detecção ao lado do rótulo. Fornece uma visão sobre a certeza do modelo para cada detecção. |
show_labels | bool | True | Exibe rótulos para cada detecção na saída visual. Fornece compreensão imediata dos objetos detectados. |
Link to this sectionUso do SolutionAnnotator#
Todas as Ultralytics Solutions usam a classe separada SolutionAnnotator, que estende a classe principal Annotator, e possuem os seguintes métodos:
| Método | Tipo de Retorno | Descrição |
|---|---|---|
draw_region() | None | Desenha uma região usando pontos, cores e espessura especificados. |
queue_counts_display() | None | Exibe contagens de filas na região especificada. |
display_analytics() | None | Exibe estatísticas gerais para gerenciamento de estacionamentos. |
estimate_pose_angle() | float | Calcula o ângulo entre três pontos na pose de um objeto. |
draw_specific_kpts() | np.ndarray | Desenha pontos-chave específicos na imagem. |
plot_workout_information() | int | Desenha uma caixa de texto rotulada na imagem. |
plot_angle_and_count_and_stage() | None | Visualiza o ângulo, a contagem de repetições e o estágio para monitoramento de treino. |
plot_distance_and_line() | None | Exibe a distância entre centróides e os conecta com uma linha. |
display_objects_labels() | None | Anota caixas delimitadoras com rótulos de classe de objeto. |
sweep_annotator() | None | Visualiza uma linha de varredura vertical e um rótulo opcional. |
visioneye() | None | Mapeia e conecta centróides de objetos a um ponto de "olho" visual. |
adaptive_label() | None | Desenha um rótulo de fundo circular ou retangular no centro de uma caixa delimitadora. |
Link to this sectionTrabalhando com SolutionResults#
Exceto para Similarity Search, cada chamada de solução retorna um objeto SolutionResults.
- Para contagem de objetos, os resultados incluem
in_count,out_counteclasswise_count.
import cv2
from ultralytics import solutions
im0 = cv2.imread("path/to/img")
region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)]
counter = solutions.ObjectCounter(
show=True, # display the output
region=region_points, # pass region points
model="yolo26n.pt", # model="yolo26n-obb.pt" for object counting with OBB model.
# classes=[0, 2], # count specific classes i.e. person and car with COCO pretrained model.
# tracker="botsort.yaml" # Choose trackers i.e "bytetrack.yaml"
)
results = counter(im0)
print(results.in_count) # display in_counts
print(results.out_count) # display out_counts
print(results.classwise_count) # display classwise_countO objeto SolutionResults possui os seguintes atributos:
| Atributo | Tipo | Descrição |
|---|---|---|
plot_im | np.ndarray | Imagem com sobreposições visuais, como contagens, efeitos de desfoque ou melhorias específicas da solução. |
in_count | int | Número total de objetos detectados entrando na zona definida no fluxo de vídeo. |
out_count | int | Número total de objetos detectados saindo da zona definida no fluxo de vídeo. |
classwise_count | Dict[str, int] | Dicionário que registra contagens de entrada/saída de objetos por classe para análises avançadas. |
queue_count | int | Número de objetos atualmente dentro de uma fila ou área de espera predefinida (adequado para gerenciamento de filas). |
workout_count | list[int] | Contagens de repetições de treino por faixa do AI Gym (uma entrada por indivíduo rastreado no momento). |
workout_angle | list[float] | Ângulos de exercício por faixa do AI Gym (uma entrada por indivíduo rastreado no momento). |
workout_stage | list[str] | Etapa atual do treino por faixa do AI Gym (uma entrada por indivíduo rastreado no momento). |
pixels_distance | float | Distância baseada em pixels entre dois objetos ou pontos, por exemplo, caixas delimitadoras. (Adequado para cálculo de distância). |
available_slots | int | Número de vagas desocupadas em uma área monitorada (adequado para gerenciamento de estacionamento). |
filled_slots | int | Número de vagas ocupadas em uma área monitorada. (Adequado para gerenciamento de estacionamento) |
email_sent | bool | Indica se um e-mail de notificação ou alerta foi enviado com sucesso (adequado para alarme de segurança). |
total_tracks | int | Número total de rastreamentos de objetos únicos observados durante a análise de vídeo. |
region_counts | Dict[str, int] | Contagens de objetos dentro de regiões ou zonas definidas pelo usuário. |
speed_dict | Dict[str, float] | Dicionário por rastreamento de velocidades de objetos calculadas, útil para análise de velocidade. |
total_crop_objects | int | Número total de imagens de objetos cortados geradas pela solução ObjectCropper. |
speed | Dict[str, float] | Dicionário contendo métricas de desempenho para rastreamento e processamento de solução. |
Para mais detalhes, consulte a documentação da classe SolutionResults.
Link to this sectionUso de Soluções via CLI#
A maioria das Soluções pode ser usada diretamente através da interface de linha de comando, incluindo:
Count, Crop, Blur, Workout, Heatmap, Isegment, Visioneye, Speed, Queue, Analytics, Inference, Trackzone
Sintaxe
yolo SOLUTIONS SOLUTION_NAME ARGS
- SOLUTIONS é uma palavra-chave necessária.
- SOLUTION_NAME é um dos seguintes:
['count', 'crop', 'blur', 'workout', 'heatmap', 'isegment', 'queue', 'speed', 'analytics', 'trackzone', 'inference', 'visioneye', 'region', 'security', 'parking']. - ARGS (opcionais) são pares personalizados
arg=value, comoshow_in=True, para substituir as configurações padrão.
yolo solutions count show=True # for object counting
yolo solutions count source="path/to/video.mp4" # specify video file pathLink to this sectionContribua com Nossas Soluções#
Recebemos contribuições da comunidade! Se você dominou um aspecto específico do Ultralytics YOLO que ainda não está coberto em nossas soluções, encorajamos você a compartilhar seu conhecimento. Escrever um guia é uma ótima maneira de retribuir à comunidade e nos ajudar a tornar nossa documentação mais abrangente e amigável.
Para começar, leia nosso Guia de Contribuição para diretrizes sobre como abrir um Pull Request (PR) 🛠️. Aguardamos suas contribuições!
Vamos trabalhar juntos para tornar o ecossistema Ultralytics YOLO mais robusto e versátil 🙏!
Link to this sectionFAQ#
Link to this sectionComo posso usar o Ultralytics YOLO para contagem de objetos em tempo real?#
O Ultralytics YOLO26 pode ser usado para contagem de objetos em tempo real aproveitando suas capacidades avançadas de detecção de objetos. Você pode seguir nosso guia detalhado sobre Contagem de Objetos para configurar o YOLO26 para análise de fluxo de vídeo ao vivo. Basta instalar o YOLO26, carregar seu modelo e processar quadros de vídeo para contar objetos dinamicamente.
Link to this sectionQuais são os benefícios de usar o Ultralytics YOLO para sistemas de segurança?#
O Ultralytics YOLO26 aprimora os sistemas de segurança oferecendo detecção de objetos em tempo real e mecanismos de alerta. Ao empregar o YOLO26, você pode criar um sistema de alarme de segurança que dispara alertas quando novos objetos são detectados na área de vigilância. Aprenda como configurar um Sistema de Alarme de Segurança com o YOLO26 para um monitoramento de segurança robusto.
Link to this sectionComo o Ultralytics YOLO pode melhorar os sistemas de gerenciamento de filas?#
O Ultralytics YOLO26 pode melhorar significativamente os sistemas de gerenciamento de filas contando e rastreando pessoas em filas com precisão, ajudando assim a reduzir os tempos de espera e otimizar a eficiência do serviço. Siga nosso guia detalhado sobre Gerenciamento de Filas para aprender como implementar o YOLO26 para monitoramento e análise eficazes de filas.
Link to this sectionO Ultralytics YOLO pode ser usado para monitoramento de treinos?#
Sim, o Ultralytics YOLO26 pode ser usado efetivamente para monitorar treinos, rastreando e analisando rotinas de fitness em tempo real. Isso permite uma avaliação precisa da forma do exercício e do desempenho. Explore nosso guia sobre Monitoramento de Treinos para aprender como configurar um sistema de monitoramento de treino alimentado por IA usando o YOLO26.
Link to this sectionComo o Ultralytics YOLO ajuda na criação de mapas de calor para visualização de dados?#
O Ultralytics YOLO26 pode gerar mapas de calor para visualizar a intensidade dos dados em uma determinada área, destacando regiões de alta atividade ou interesse. Esse recurso é particularmente útil para entender padrões e tendências em várias tarefas de visão computacional. Saiba mais sobre como criar e usar Mapas de Calor com o YOLO26 para análise e visualização de dados abrangentes.