Link to this sectionUltralytics YOLO26 trên NVIDIA Jetson sử dụng DeepStream SDK và TensorRT#
Watch: How to use Ultralytics YOLO26 models with NVIDIA Deepstream on Jetson Orin NX 🚀
Hướng dẫn toàn diện này cung cấp các bước chi tiết để triển khai Ultralytics YOLO26 trên các thiết bị NVIDIA Jetson sử dụng DeepStream SDK và TensorRT. Tại đây, chúng tôi sử dụng TensorRT để tối ưu hóa hiệu suất inference trên nền tảng Jetson.
Hướng dẫn này đi qua cấu hình DeepStream cho YOLO26, hiệu chuẩn INT8, thiết lập đa luồng và kết quả benchmark.
Hướng dẫn này đã được kiểm nghiệm với NVIDIA Jetson Orin Nano Super Developer Kit chạy bản phát hành JetPack ổn định mới nhất là JP6.1, Seeed Studio reComputer J4012 dựa trên NVIDIA Jetson Orin NX 16GB chạy bản phát hành JetPack JP5.1.3 và Seeed Studio reComputer J1020 v2 dựa trên NVIDIA Jetson Nano 4GB chạy bản phát hành JetPack JP4.6.4. Hướng dẫn này được kỳ vọng sẽ hoạt động trên tất cả dòng phần cứng NVIDIA Jetson, bao gồm cả các thiết bị mới nhất và cũ hơn.
Link to this sectionNVIDIA DeepStream là gì?#
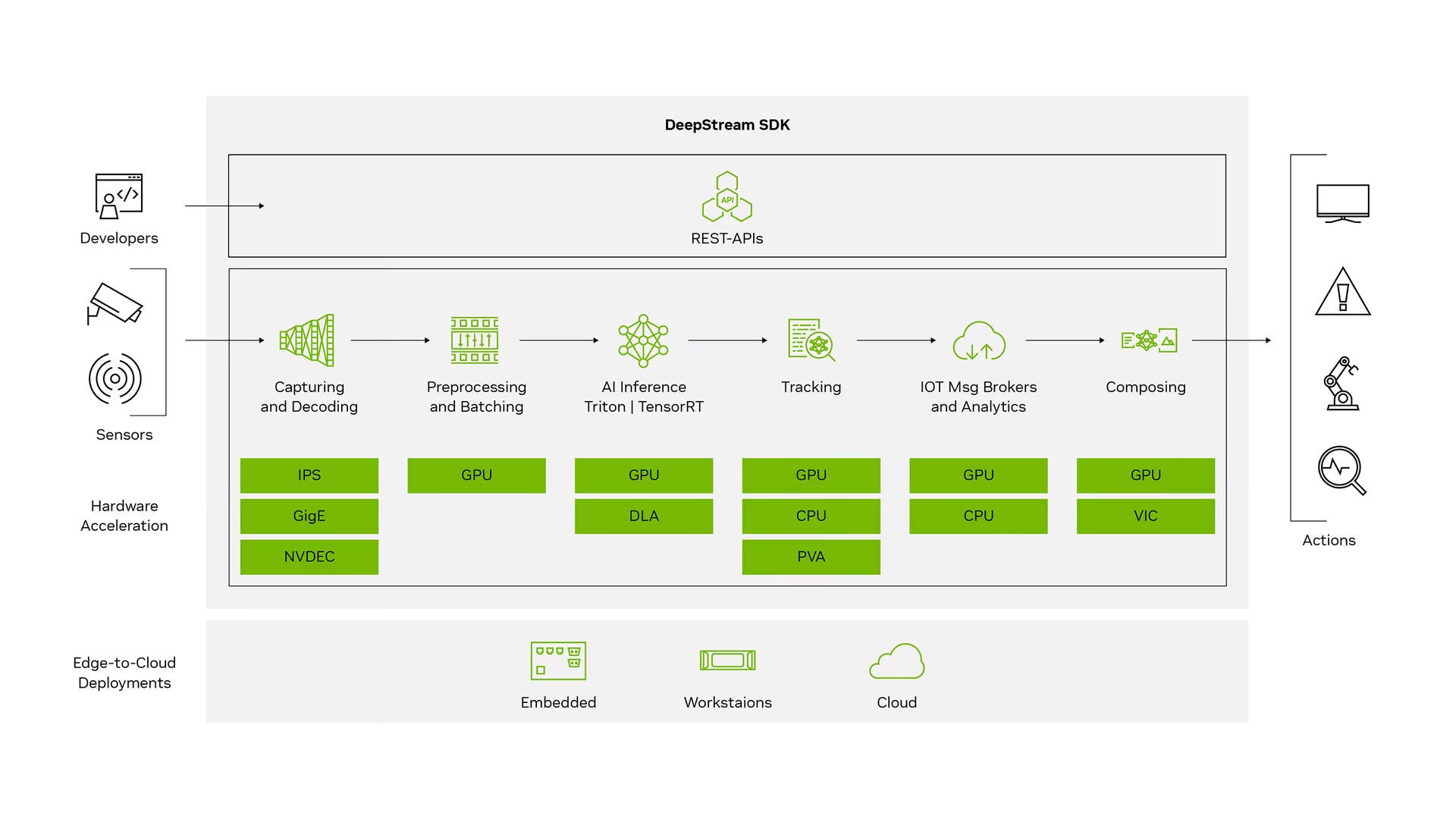
NVIDIA's DeepStream SDK là một bộ công cụ phân tích streaming hoàn chỉnh dựa trên GStreamer dành cho việc xử lý đa cảm biến dựa trên AI, hiểu video, âm thanh và hình ảnh. Đây là lựa chọn lý tưởng cho các nhà phát triển vision AI, đối tác phần mềm, startup và các OEM đang xây dựng các ứng dụng và dịch vụ IVA (Intelligent Video Analytics). Giờ đây, bạn có thể tạo các pipeline xử lý luồng tích hợp neural networks và các tác vụ xử lý phức tạp khác như tracking, mã hóa/giải mã video và render video. Các pipeline này cho phép phân tích theo thời gian thực trên dữ liệu video, hình ảnh và cảm biến. Hỗ trợ đa nền tảng của DeepStream mang đến cho bạn cách nhanh hơn và dễ dàng hơn để phát triển các ứng dụng và dịch vụ vision AI tại chỗ (on-premise), tại biên (at the edge) và trên đám mây.
Link to this sectionĐiều kiện tiên quyết#
Trước khi bạn bắt đầu thực hiện theo hướng dẫn này:
- Truy cập tài liệu của chúng tôi, Hướng dẫn khởi động nhanh: NVIDIA Jetson với Ultralytics YOLO26 để thiết lập thiết bị NVIDIA Jetson của bạn với Ultralytics YOLO26
- Cài đặt DeepStream SDK theo phiên bản JetPack
- Đối với JetPack 4.6.4, hãy cài đặt DeepStream 6.0.1
- Đối với JetPack 5.1.3, hãy cài đặt DeepStream 6.3
- Đối với JetPack 6.1, hãy cài đặt DeepStream 7.1
- Đối với JetPack 7.1, hãy cài đặt DeepStream 9.0
Trong hướng dẫn này, chúng tôi đã sử dụng phương pháp gói Debian để cài đặt DeepStream SDK lên thiết bị Jetson. Bạn cũng có thể truy cập DeepStream SDK trên Jetson (Archived) để truy cập các phiên bản cũ của DeepStream.
Link to this sectionCấu hình DeepStream cho YOLO26#
Tại đây, chúng tôi sử dụng kho lưu trữ GitHub marcoslucianops/DeepStream-Yolo, bao gồm hỗ trợ NVIDIA DeepStream SDK cho các model YOLO. Chúng tôi đánh giá cao những nỗ lực đóng góp của marcoslucianops!
-
Cài đặt Ultralytics với các phụ thuộc cần thiết
cd ~ pip install -U pip git clone https://github.com/ultralytics/ultralytics cd ultralytics pip install -e ".[export]" onnxslim -
Clone kho lưu trữ DeepStream-Yolo
cd ~ git clone https://github.com/marcoslucianops/DeepStream-Yolo -
Sao chép tệp
export_yolo26.pytừ thư mụcDeepStream-Yolo/utilssang thư mụcultralyticscp ~/DeepStream-Yolo/utils/export_yolo26.py ~/ultralytics cd ultralytics -
Tải xuống model phát hiện Ultralytics YOLO26 (.pt) mà bạn chọn từ các bản phát hành YOLO26. Ở đây chúng tôi sử dụng yolo26s.pt.
wget https://github.com/ultralytics/assets/releases/download/v8.4.0/yolo26s.pt
Bạn cũng có thể sử dụng một model YOLO26 được huấn luyện tùy chỉnh.
-
Chuyển đổi model sang ONNX
python3 export_yolo26.py -w yolo26s.pt
Đối với DeepStream 5.1, hãy loại bỏ đối số --dynamic và sử dụng opset 12 hoặc thấp hơn. opset mặc định là 17.
--opset 12Để thay đổi kích thước inference (mặc định: 640)
-s SIZE
--size SIZE
-s HEIGHT WIDTH
--size HEIGHT WIDTHVí dụ cho 1280:
-s 1280
or
-s 1280 1280Để đơn giản hóa model ONNX (DeepStream >= 6.0)
--simplifyĐể sử dụng dynamic batch-size (DeepStream >= 6.1)
--dynamicĐể sử dụng static batch-size (ví dụ cho batch-size = 4)
--batch 4-
Sao chép tệp model
.onnxđã tạo và tệplabels.txtvào thư mụcDeepStream-Yolocp yolo26s.onnx labels.txt ~/DeepStream-Yolo cd ~/DeepStream-Yolo -
Đặt phiên bản CUDA theo phiên bản JetPack đã cài đặt
Đối với JetPack 4.6.4:
export CUDA_VER=10.2Đối với JetPack 5.1.3:
export CUDA_VER=11.4Đối với JetPack 6.1:
export CUDA_VER=12.6 -
Biên dịch thư viện
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_Yolo -
Chỉnh sửa tệp
config_infer_primary_yolo26.txttheo model của bạn (cho YOLO26s với 80 lớp)[property] ... onnx-file=yolo26s.onnx ... num-detected-classes=80 ... parse-bbox-func-name=NvDsInferParseYolo ...
YOLO26 thay đổi kích thước đầu vào bằng cách đệm ở giữa và chạy mà không cần NMS. Để đạt được độ chính xác tốt nhất, hãy thêm các mục sau vào phần [property] của tệp config_infer_primary_yolo26.txt:
[property]
...
maintain-aspect-ratio=1
symmetric-padding=1
cluster-mode=4
...-
Chỉnh sửa tệp
deepstream_app_config... [primary-gie] ... config-file=config_infer_primary_yolo26.txt -
Bạn cũng có thể thay đổi nguồn video trong tệp
deepstream_app_config. Tại đây, một tệp video mặc định được tải... [source0] ... uri=file:///opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4
Link to this sectionChạy Inference#
deepstream-app -c deepstream_app_config.txtSẽ mất một khoảng thời gian đáng kể để tạo tệp engine TensorRT trước khi bắt đầu inference. Vì vậy, hãy kiên nhẫn.

Nếu bạn muốn chuyển đổi model sang độ chính xác FP16, chỉ cần đặt model-engine-file=model_b1_gpu0_fp16.engine và network-mode=2 bên trong tệp config_infer_primary_yolo26.txt
Link to this sectionHiệu chỉnh INT8#
Nếu bạn muốn sử dụng độ chính xác INT8 cho inference, bạn cần thực hiện theo các bước dưới đây:
Hiện tại INT8 không hoạt động với TensorRT 10.x. Phần này của hướng dẫn đã được kiểm nghiệm với TensorRT 8.x và được kỳ vọng sẽ hoạt động.
-
Đặt biến môi trường
OPENCVexport OPENCV=1 -
Biên dịch thư viện
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_Yolo -
Đối với tập dữ liệu COCO, hãy tải xuống val2017, giải nén và di chuyển đến thư mục
DeepStream-Yolo -
Tạo một thư mục mới cho các hình ảnh hiệu chỉnh
mkdir calibration -
Chạy lệnh sau để chọn ngẫu nhiên 1000 hình ảnh từ tập dữ liệu COCO để thực hiện hiệu chỉnh
for jpg in $(ls -1 val2017/*.jpg | sort -R | head -1000); do cp ${jpg} calibration/ done
NVIDIA khuyến nghị sử dụng ít nhất 500 hình ảnh để có được độ chính xác tốt. Trong ví dụ này, 1000 hình ảnh được chọn để đạt được độ chính xác tốt hơn (nhiều hình ảnh hơn = độ chính xác cao hơn). Bạn có thể thiết lập số lượng từ head -1000. Ví dụ, đối với 2000 hình ảnh, hãy dùng head -2000. Quá trình này có thể tốn khá nhiều thời gian.
-
Tạo tệp
calibration.txtvới tất cả các hình ảnh đã chọnrealpath calibration/*jpg > calibration.txt -
Đặt các biến môi trường
export INT8_CALIB_IMG_PATH=calibration.txt export INT8_CALIB_BATCH_SIZE=1
Giá trị INT8_CALIB_BATCH_SIZE cao hơn sẽ mang lại độ chính xác cao hơn và tốc độ hiệu chỉnh nhanh hơn. Hãy đặt giá trị này tùy theo bộ nhớ GPU của bạn.
-
Cập nhật tệp
config_infer_primary_yolo26.txtTừ
... model-engine-file=model_b1_gpu0_fp32.engine #int8-calib-file=calib.table ... network-mode=0 ...Đến
... model-engine-file=model_b1_gpu0_int8.engine int8-calib-file=calib.table ... network-mode=1 ...
Link to this sectionChạy Inference INT8#
Chạy cùng lệnh đó để xây dựng engine INT8 và bắt đầu inference:
deepstream-app -c deepstream_app_config.txtLink to this sectionThiết lập đa luồng (MultiStream)#
Watch: How to Run Multi-Stream Inference with Ultralytics YOLO26 using NVIDIA DeepStream on Jetson Orin 🚀
Để thiết lập nhiều luồng trong một ứng dụng DeepStream duy nhất, hãy thực hiện các thay đổi sau đối với tệp deepstream_app_config.txt:
-
Thay đổi số hàng và số cột để tạo lưới hiển thị theo số lượng luồng bạn muốn có. Ví dụ, đối với 4 luồng, chúng ta có thể thêm 2 hàng và 2 cột.
[tiled-display] rows=2 columns=2 -
Thêm một nhóm
[sourceN]riêng biệt cho mỗi luồng, mỗi nhóm cóurivànum-sources=1của riêng nó.[source0] enable=1 type=3 uri=file:///path/to/video1.mp4 num-sources=1 [source1] enable=1 type=3 uri=file:///path/to/video2.mp4 num-sources=1 [source2] enable=1 type=3 uri=file:///path/to/video3.mp4 num-sources=1 [source3] enable=1 type=3 uri=file:///path/to/video4.mp4 num-sources=1
Link to this sectionChạy Inference Đa luồng#
Chạy cùng lệnh đó để khởi chạy tất cả các luồng trong chế độ hiển thị dạng lưới:
deepstream-app -c deepstream_app_config.txt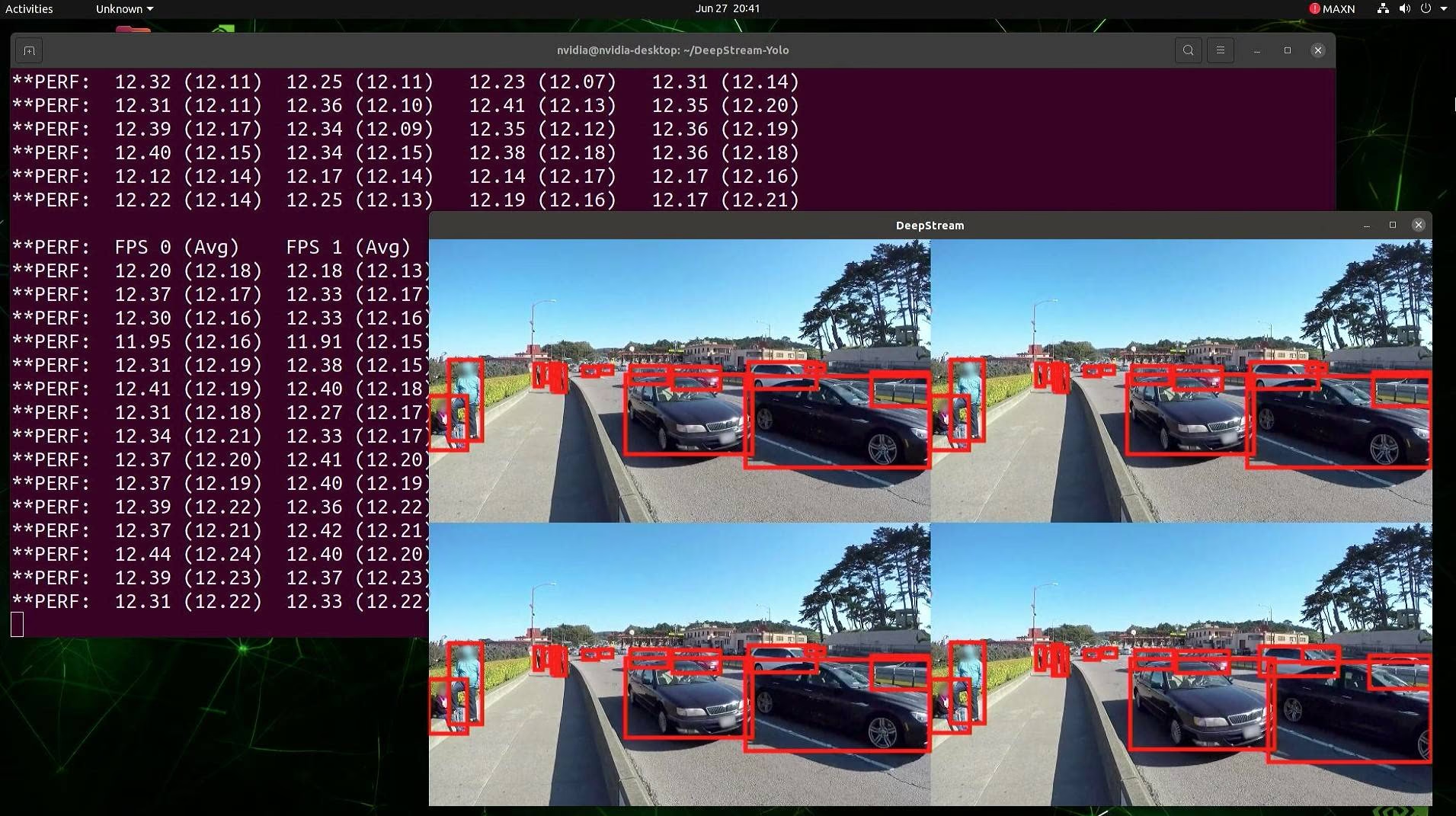
Link to this sectionKết quả Benchmark#
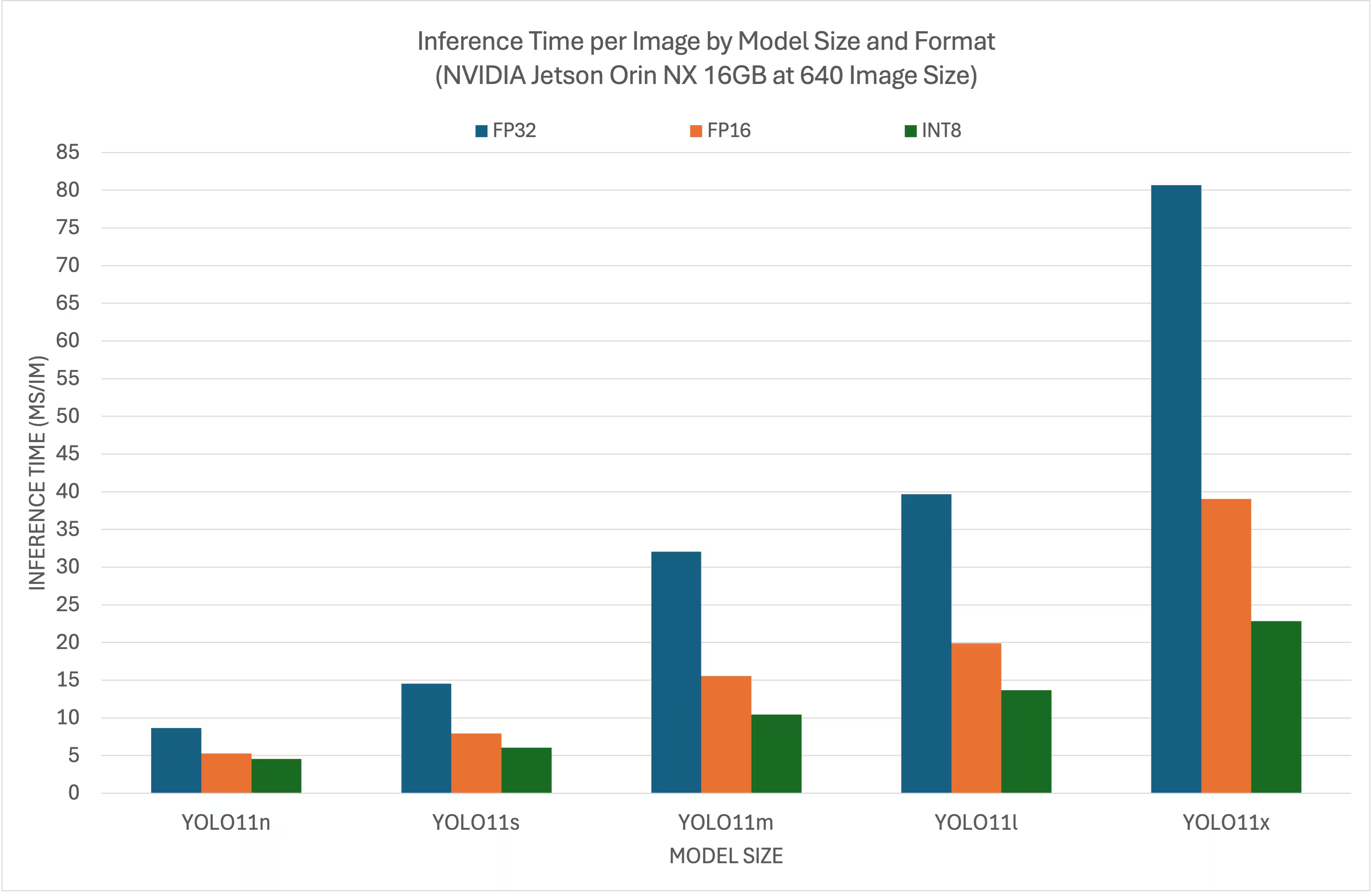
Các benchmark sau đây tóm tắt cách các model YOLO11 hoạt động ở các cấp độ chính xác TensorRT khác nhau với kích thước đầu vào 640x640 trên NVIDIA Jetson Orin NX 16GB. YOLO26 sử dụng cùng quy trình xuất và inference DeepStream được mô tả ở trên.
Link to this sectionBiểu đồ so sánh#
Link to this sectionBảng so sánh chi tiết#
| Định dạng | Trạng thái | Thời gian suy luận (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 8.64 |
| TensorRT (FP16) | ✅ | 5.27 |
| TensorRT (INT8) | ✅ | 4.54 |
Link to this sectionLời cảm ơn#
Hướng dẫn này ban đầu được tạo bởi những người bạn của chúng tôi tại Seeed Studio, Lakshantha và Elaine.
Link to this sectionCâu hỏi thường gặp#
Link to this sectionLàm thế nào để thiết lập Ultralytics YOLO26 trên thiết bị NVIDIA Jetson?#
Để thiết lập Ultralytics YOLO26 trên thiết bị NVIDIA Jetson, trước tiên bạn cần cài đặt DeepStream SDK tương thích với phiên bản JetPack của bạn. Hãy làm theo hướng dẫn từng bước trong Hướng dẫn khởi động nhanh của chúng tôi để cấu hình NVIDIA Jetson cho việc triển khai YOLO26.
Link to this sectionLợi ích của việc sử dụng TensorRT với YOLO26 trên NVIDIA Jetson là gì?#
Sử dụng TensorRT với YOLO26 giúp tối ưu hóa model cho việc inference, giảm đáng kể độ trễ và cải thiện thông lượng trên các thiết bị NVIDIA Jetson. TensorRT cung cấp khả năng deep learning inference hiệu suất cao, độ trễ thấp thông qua việc hợp nhất các lớp (layer fusion), hiệu chỉnh độ chính xác và tự động tinh chỉnh kernel. Điều này dẫn đến việc thực thi nhanh hơn và hiệu quả hơn, đặc biệt hữu ích cho các ứng dụng thời gian thực như phân tích video và máy tự hành.
Link to this sectionTôi có thể chạy Ultralytics YOLO26 với DeepStream SDK trên các phần cứng NVIDIA Jetson khác nhau không?#
Có, hướng dẫn triển khai Ultralytics YOLO26 với DeepStream SDK và TensorRT tương thích trên toàn bộ dòng sản phẩm NVIDIA Jetson. Điều này bao gồm các thiết bị như Jetson Orin NX 16GB với JetPack 5.1.3 và Jetson Nano 4GB với JetPack 4.6.4. Hãy tham khảo phần Cấu hình DeepStream cho YOLO26 để biết các bước chi tiết.
Link to this sectionLàm thế nào để tôi có thể chuyển đổi model YOLO26 sang ONNX cho DeepStream?#
Để chuyển đổi model YOLO26 sang định dạng ONNX phục vụ triển khai với DeepStream, hãy sử dụng tập lệnh utils/export_yolo26.py từ kho lưu trữ DeepStream-Yolo.
Dưới đây là một ví dụ lệnh:
python3 utils/export_yolo26.py -w yolo26s.pt --opset 12 --simplifyĐể biết thêm chi tiết về việc chuyển đổi model, hãy xem phần xuất model của chúng tôi.
Link to this sectionLàm cách nào để chạy inference INT8 với YOLO26 trên DeepStream?#
Để chạy inference INT8, hãy hiệu chuẩn model trên một tập hợp ảnh đại diện và chuyển cấu hình DeepStream sang chế độ INT8. Tải xuống tập ảnh COCO val2017, chọn khoảng 1000 ảnh để hiệu chuẩn, đặt các biến môi trường INT8_CALIB_IMG_PATH và INT8_CALIB_BATCH_SIZE, sau đó cập nhật tệp config_infer_primary_yolo26.txt với model-engine-file=model_b1_gpu0_int8.engine, int8-calib-file=calib.table và network-mode=1. Xem phần Hiệu chuẩn INT8 để biết các bước đầy đủ. INT8 hiện yêu cầu TensorRT 8.x.
Link to this sectionLàm cách nào để chạy nhiều luồng camera với DeepStream trên Jetson?#
Để xử lý nhiều luồng trong một ứng dụng DeepStream, hãy chỉnh sửa tệp deepstream_app_config.txt để thêm lưới hiển thị (tiled-display) và liệt kê URI của từng nguồn. Đặt rows và columns trong phần [tiled-display] để xây dựng lưới, thêm một nhóm [sourceN] riêng cho từng luồng với uri và num-sources=1 của riêng nó, đồng thời điều chỉnh lưới cho phù hợp với số lượng luồng. Xem phần Thiết lập Đa luồng để có ví dụ hoàn chỉnh.
Link to this sectionCác benchmark hiệu suất cho YOLO trên NVIDIA Jetson Orin NX là gì?#
Hiệu suất của các model YOLO11 trên NVIDIA Jetson Orin NX 16GB thay đổi tùy theo cấp độ chính xác của TensorRT. Ví dụ, các model YOLO11s đạt được:
- Độ chính xác FP32: 14.53 ms/im, 68.8 FPS
- Độ chính xác FP16: 7.91 ms/im, 126 FPS
- Độ chính xác INT8: 6.05 ms/im, 165 FPS
Những benchmark này nhấn mạnh hiệu suất và khả năng khi sử dụng các model YOLO11 được tối ưu hóa bằng TensorRT trên phần cứng NVIDIA Jetson. Để biết thêm chi tiết, hãy xem phần Kết quả Benchmark của chúng tôi.