Link to this sectionRoboflow#
Roboflow 提供了用于 数据标注 和以多种格式(包括 YOLO)导出数据集的工具。本指南涵盖了为 Ultralytics YOLO 模型进行数据标注、导出和部署的内容。
Ultralytics 提供两种许可选项以适应不同的使用场景:
- AGPL-3.0 许可证:此 OSI 批准的开源许可证 非常适合学生和爱好者,旨在促进开放协作与知识共享。详情请参阅 LICENSE 文件。
- 企业许可证:针对开发和生产用途,此许可证支持将 Ultralytics 软件和 AI 模型无缝集成到商业产品和服务中,包括内部工具、自动化工作流和生产部署,从而绕过 AGPL-3.0 的开源要求。如需开始使用,请通过 Ultralytics Licensing 联系我们。
更多详情请参阅 Ultralytics 许可页面。
本指南演示了如何使用 Roboflow 查找、标注和整理数据,以训练自定义的 Ultralytics YOLO26 模型。
Link to this section收集用于训练自定义 YOLO26 模型的数据#
Roboflow 提供两项主要服务来协助收集 Ultralytics YOLO 模型 的数据:Universe 和 Collect。有关数据收集策略的更多常规信息,请参阅我们的 数据收集与标注指南。
Link to this sectionRoboflow Universe#
Roboflow Universe 是一个在线计算机视觉 数据集 存储库。你可以导出 YOLO 格式的数据集,以便与 Ultralytics 模型结合使用。
Link to this sectionRoboflow Collect#
如果你倾向于自己收集图像,Roboflow Collect 是一个开源项目,支持通过边缘设备上的网络摄像头自动收集图像。你可以使用文本或图像提示来指定需要收集的数据,从而帮助你只获取视觉模型所需的图像。
Link to this section上传、转换并标注 YOLO26 格式数据#
Roboflow Annotate 是一款在线工具,用于标注各种计算机视觉任务的图像,包括 目标检测、分类 和 分割。
若要为 Ultralytics YOLO 模型标注数据,请在 Roboflow 中创建一个项目,上传你的图像,然后开始标注。
Link to this section标注工具#
Link to this section标注助手(SAM 集成)#
Roboflow 集成了基于 Segment Anything Model (SAM) 的标注助手,有助于加快标注速度。
要使用标注助手,请点击侧边栏中的光标图标。SAM 将在你的项目中启用。
将鼠标悬停在物体上,SAM 可能会建议一个标注。点击以接受该标注。你可以通过在建议区域内或外点击来调整标注的精确度。
Link to this section标签管理#
你可以使用侧边栏中的 Tags 面板为图像添加标签。标签可以代表位置、摄像头来源等属性。通过这些标签,你可以搜索特定图像并生成包含带有特定标签图像的数据集版本。
Link to this section标注助手(基于模型)#
托管在 Roboflow 上的模型可以与标注助手结合使用,以建议标注。将你的 YOLO 模型权重上传到 Roboflow(见下文说明),然后通过侧边栏中的魔法棒图标激活标注助手。
Link to this sectionYOLO26 数据集管理#
Roboflow 提供了多种工具来理解和管理你的计算机视觉 数据集。
Link to this section数据集搜索#
使用数据集搜索功能,根据文本描述或特定标签/标记查找图像。通过点击侧边栏中的“Dataset”即可访问此功能。
Link to this section健康检查#
在训练之前,请使用 Roboflow 的 Health Check 功能深入了解你的数据集并确定潜在的改进之处。通过侧边栏的“Health Check”链接访问它。它提供有关图像大小、类别平衡、标注热力图等的统计数据。
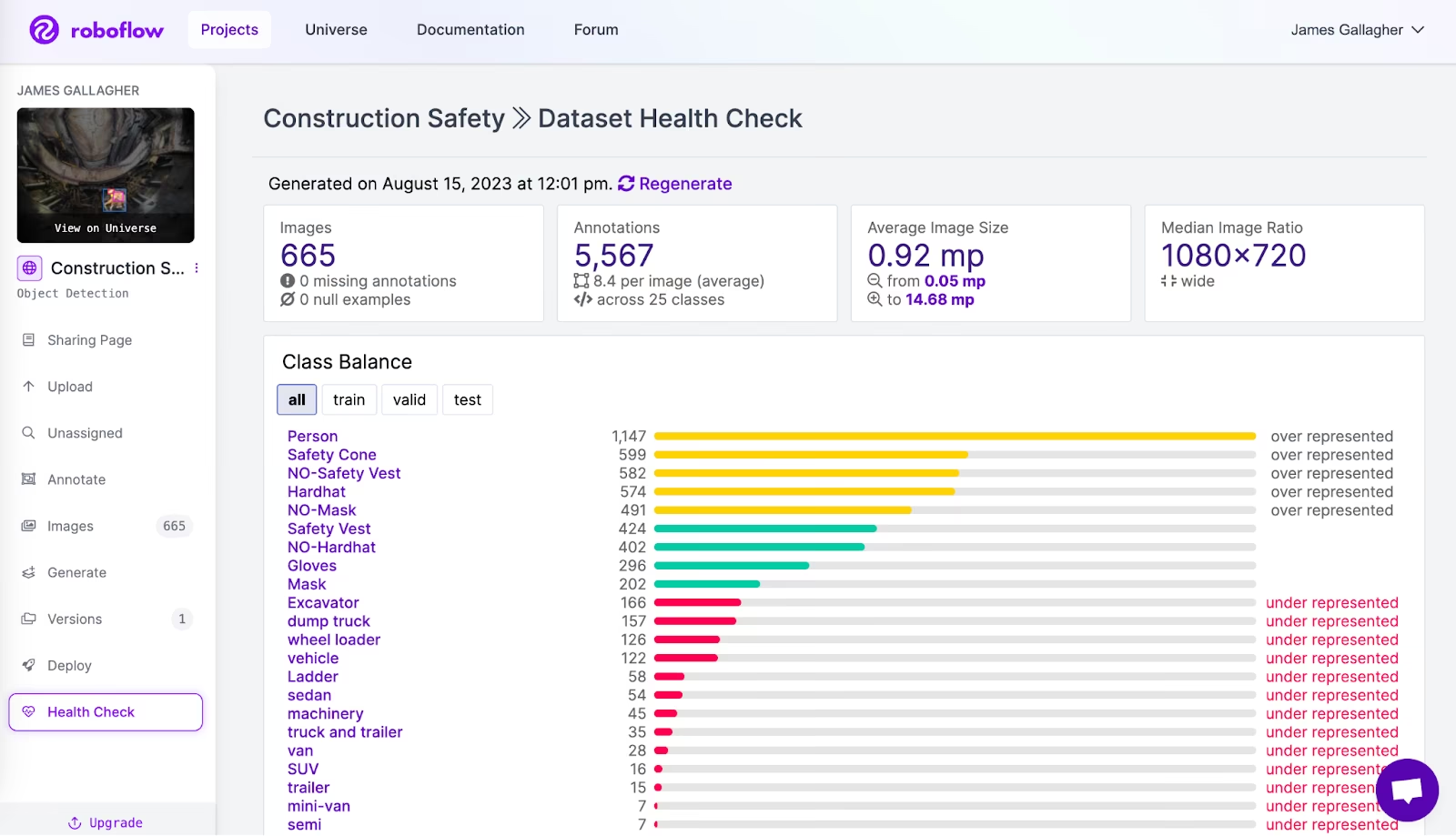
Health Check 可能会建议进行更改以提高性能,例如解决在类别平衡功能中识别出的类别失衡问题。了解数据集健康状况对于有效的 模型训练 至关重要。
Link to this section预处理与增强数据以提高模型稳健性#
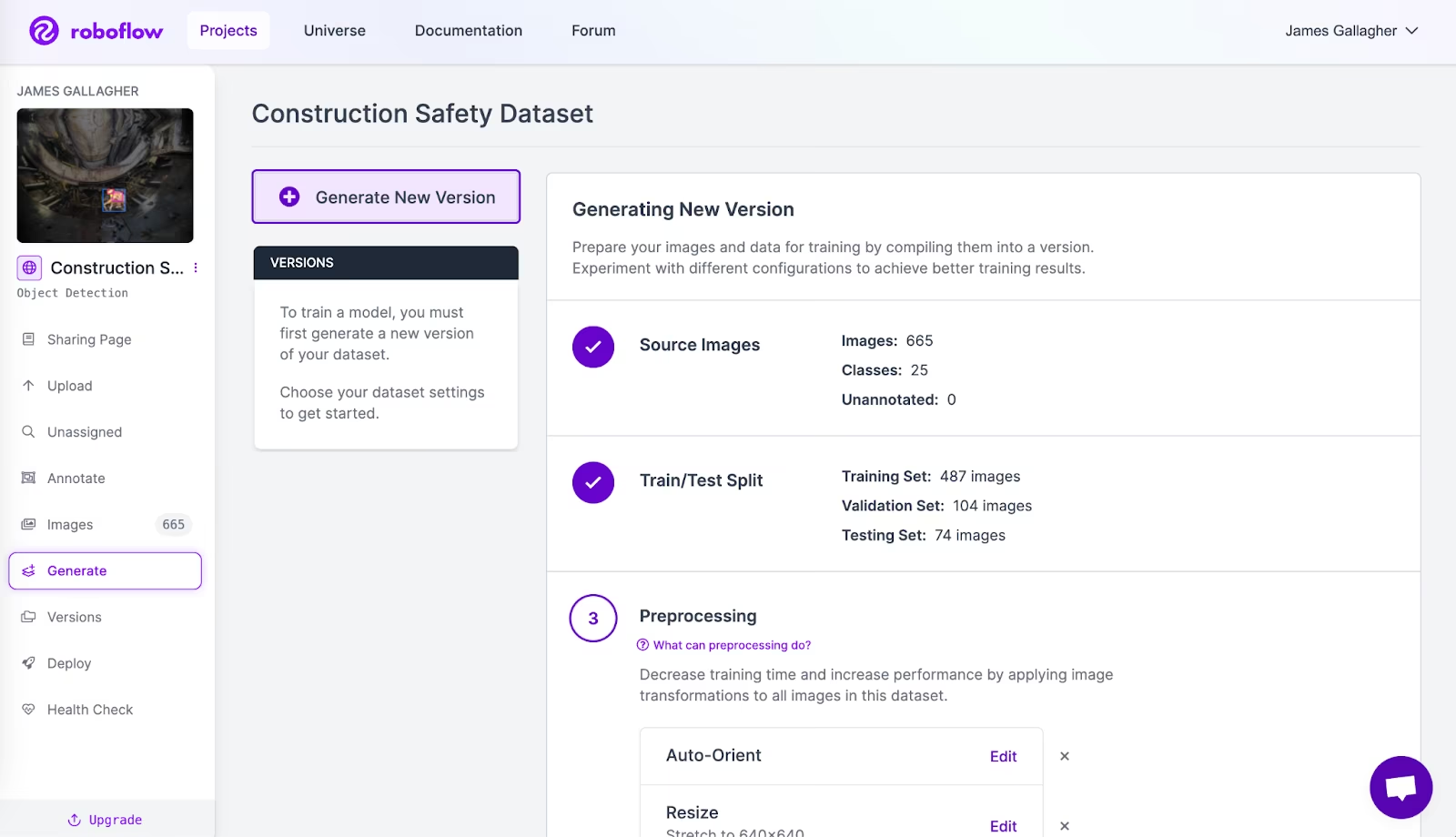
要导出数据,你需要创建一个数据集版本,这是你数据集在特定时间点的快照。点击侧边栏中的“Versions”,然后点击“Create New Version”。在这里,你可以应用预处理步骤和 数据增强,从而提高模型的稳健性。
对于每个选择的增强功能,弹出的窗口允许你微调其参数,例如亮度。适当的增强可以显著提高模型的泛化能力,这是我们在 模型训练技巧指南 中讨论的关键概念。
Link to this section导出 40+ 种格式的数据用于模型训练#
数据集版本生成后,你可以将其导出为各种适合模型训练的格式。点击版本页面上的“Export Dataset”按钮。
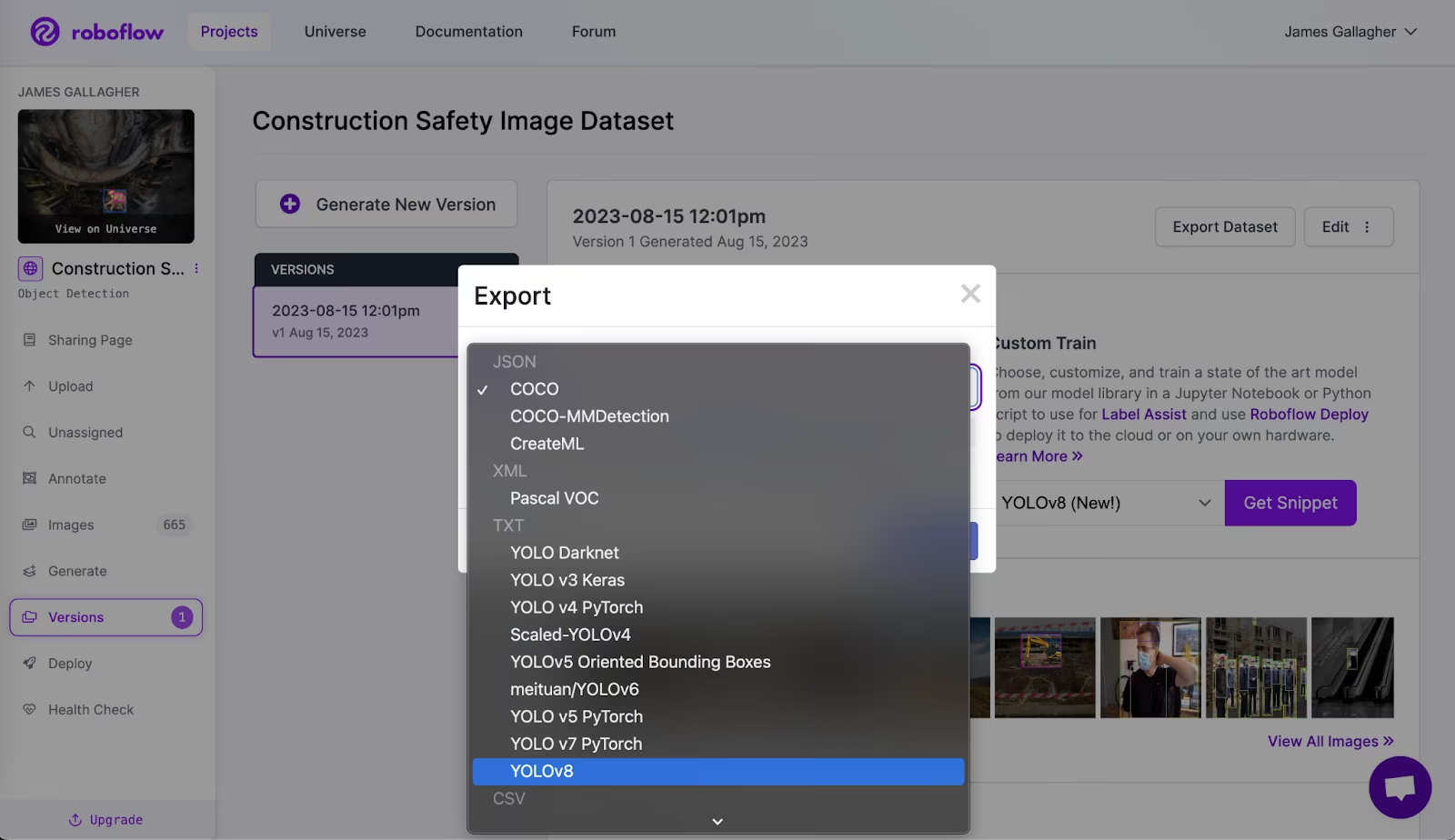
选择“YOLO26”格式以确保与 Ultralytics 训练流水线的兼容性。现在,你已准备好训练自定义的 YOLO26 模型。有关使用导出数据集启动训练的详细说明,请参阅 Ultralytics Train 模式文档。
Link to this section上传自定义 YOLO26 模型权重以进行测试和部署#
Roboflow 为部署的模型提供了可扩展的 API,并提供与 NVIDIA Jetson、Luxonis OAK、Raspberry Pi 及基于 GPU 的系统等设备兼容的 SDK。探索我们指南中提供的各种 模型部署选项。
你可以通过一个简单的 Python 脚本将 YOLO26 模型的权重上传到 Roboflow 来进行部署。
创建一个新的 Python 文件并添加以下代码:
import roboflow # install with 'pip install roboflow'
# Log in to Roboflow (requires API key)
roboflow.login()
# Initialize Roboflow client
rf = roboflow.Roboflow()
# Define your workspace and project details
WORKSPACE_ID = "your-workspace-id" # Replace with your actual Workspace ID
PROJECT_ID = "your-project-id" # Replace with your actual Project ID
VERSION = 1 # Replace with your desired dataset version number
MODEL_PATH = "path/to/your/runs/detect/train/" # Replace with the path to your YOLO26 training results directory
# Get project and version
project = rf.workspace(WORKSPACE_ID).project(PROJECT_ID)
dataset = project.version(VERSION)
# Upload model weights for deployment
# Ensure MODEL_PATH points to the directory containing 'best.pt'
dataset.deploy(
model_type="yolov8",
model_path=MODEL_PATH,
) # Note: Use "yolov8" as model_type for YOLO26 compatibility in Roboflow deployment
print(f"Model from {MODEL_PATH} uploaded to Roboflow project {PROJECT_ID}, version {VERSION}.")
print("Deployment may take up to 30 minutes.")在此代码中,将 your-workspace-id、your-project-id、VERSION 编号以及 MODEL_PATH 替换为你 Roboflow 账户、项目和本地训练结果目录的具体值。确保 MODEL_PATH 正确指向包含你已训练的 best.pt 权重文件的目录。
当你运行上述代码时,系统会要求你进行身份验证(通常通过 API 密钥)。之后,你的模型将被上传,并为你的项目创建一个 API 端点。此过程最多可能需要 30 分钟才能完成。
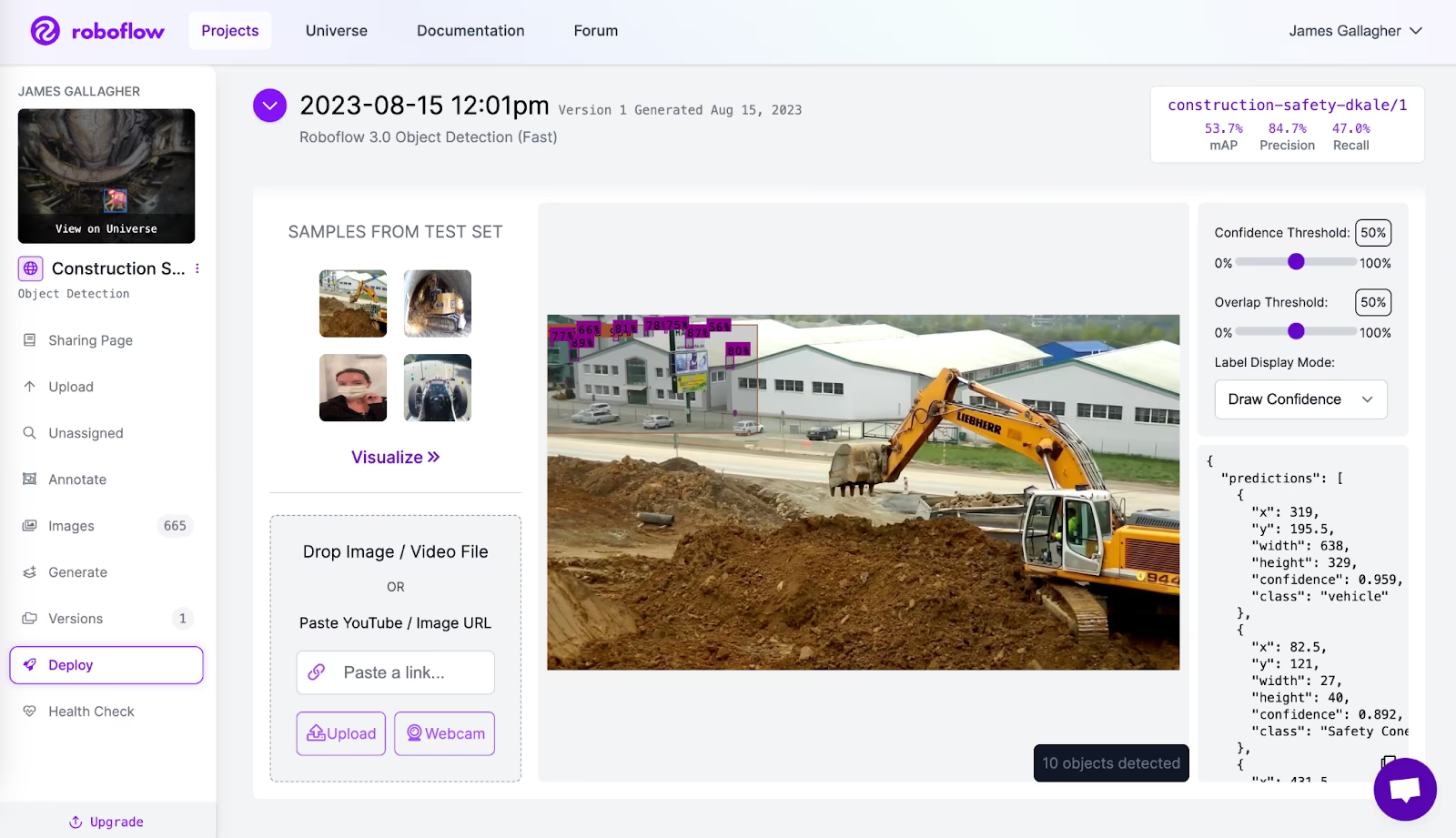
要测试你的模型并查找支持的 SDK 的部署说明,请前往 Roboflow 侧边栏的“Deploy”选项卡。在该页面顶部,会出现一个工具,允许你使用网络摄像头或通过上传图像或视频来测试模型。
上传的模型还可以用作标注助手,根据其训练结果在新图像上建议标注。
Link to this section如何评估 YOLO26 模型#
Roboflow 提供了评估模型性能的功能。了解 性能指标 对于模型迭代至关重要。
上传模型后,通过 Roboflow 仪表板上的模型页面访问模型评估工具。点击“View Detailed Evaluation”。

此工具会显示一个 混淆矩阵,用以说明模型性能,并提供使用 CLIP 嵌入的交互式向量分析图。这些功能有助于确定模型需要改进的地方。
混淆矩阵弹窗:
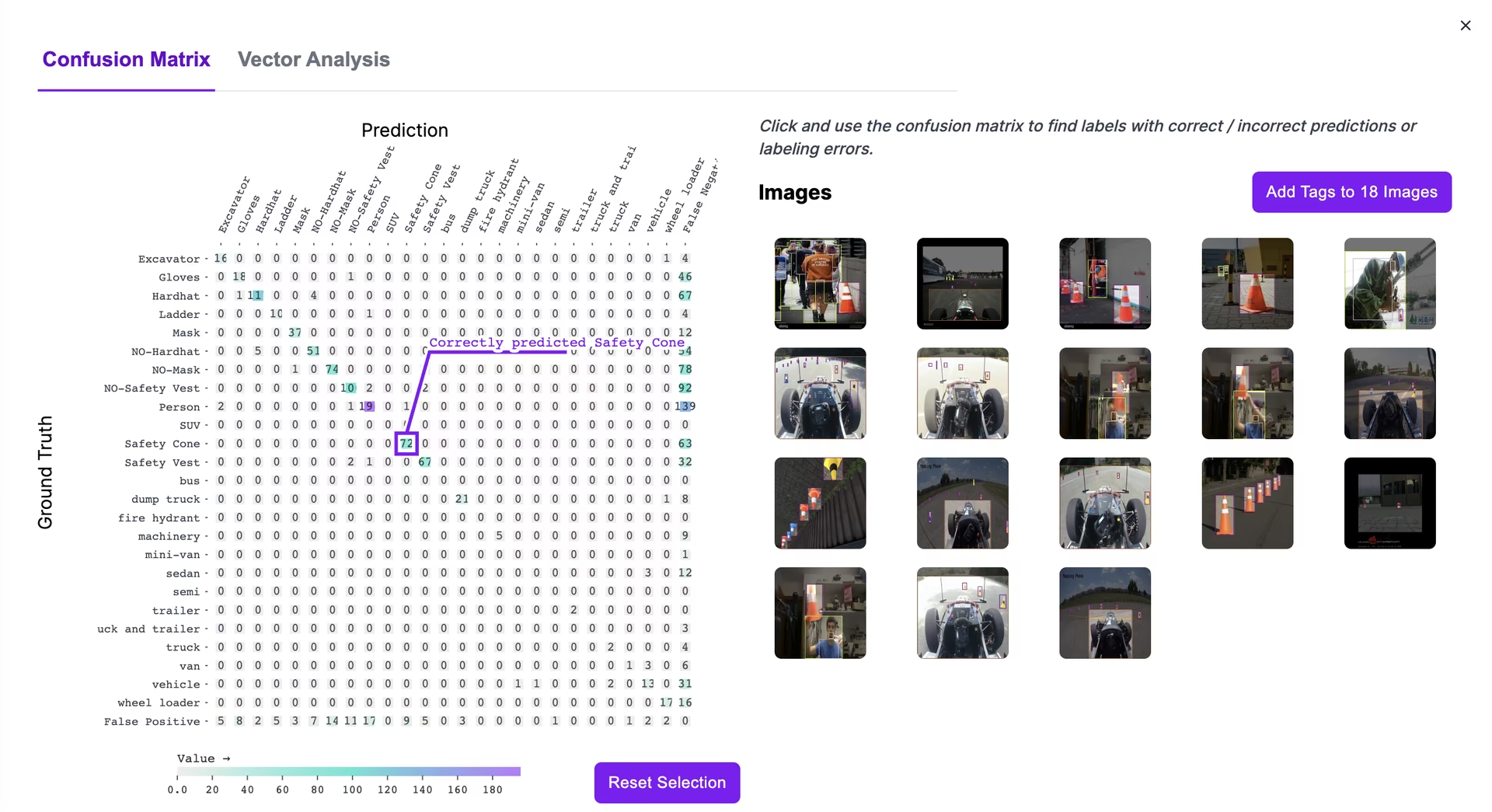
将鼠标悬停在单元格上可查看数值,点击单元格可查看包含模型预测和真实标注数据的相应图像。
点击“Vector Analysis”查看基于 CLIP 嵌入可视化图像相似性的散点图。越靠近的图像在语义上越相似。点代表图像,颜色从白色(性能良好)到红色(性能较差)渐变。
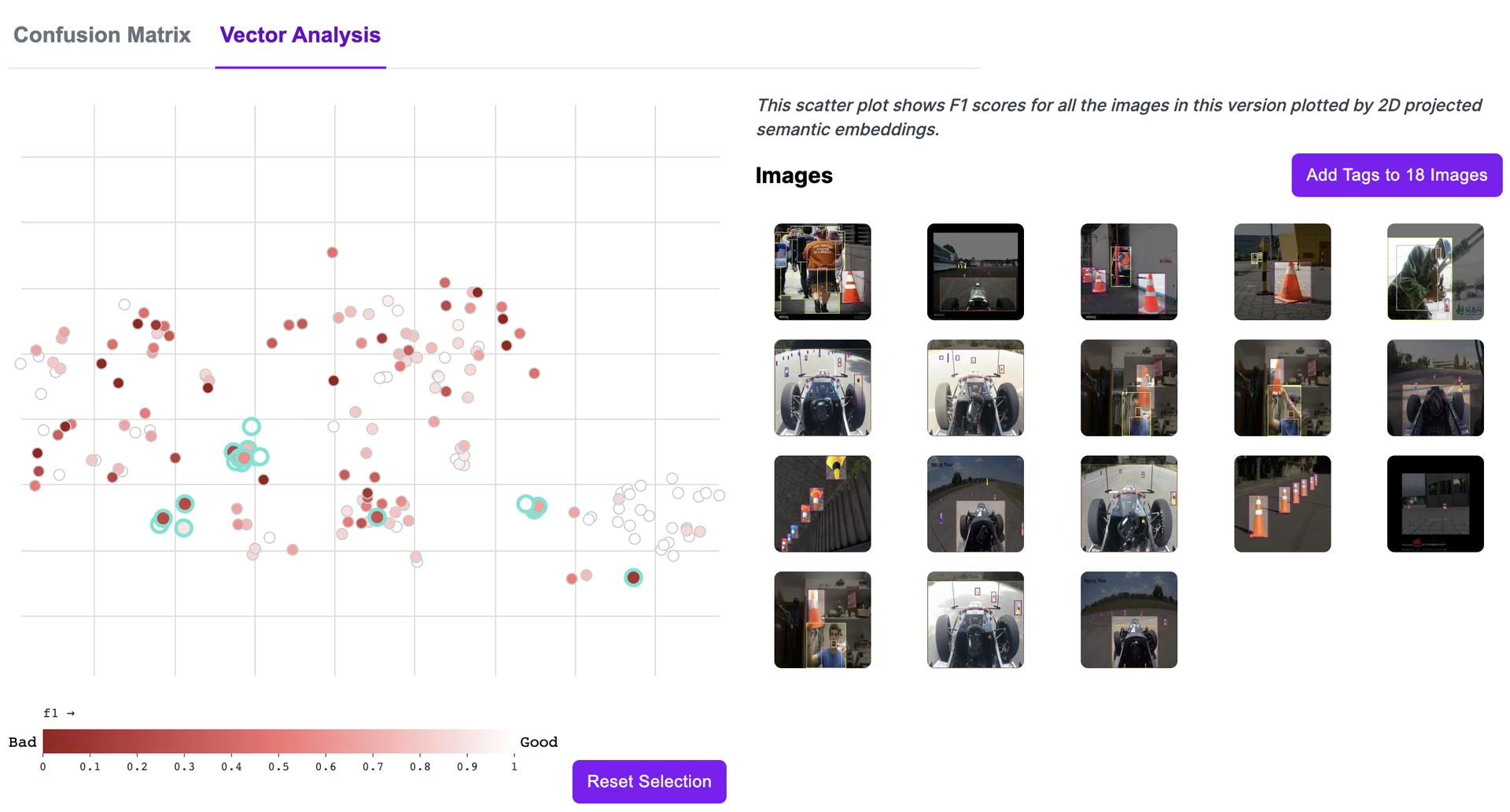
向量分析有助于:
- 识别图像集群。
- 准确定位模型表现不佳的集群。
- 理解导致性能较差的图像之间的共同点。
Link to this section学习资源#
- 在自定义数据集上训练 YOLO (Colab):用于在你的数据上进行训练的交互式 Google Colab 笔记本。
- Ultralytics YOLO 文档:关于 YOLO 模型的训练、导出和部署。
- Ultralytics 博客:关于计算机视觉和模型训练的文章。
- Ultralytics YouTube:关于模型训练和部署的视频指南。
Link to this section常见问题解答#
Link to this section如何使用 Roboflow 为 YOLO26 模型标注数据?#
使用 Roboflow Annotate。创建项目,上传图像,并使用标注工具(B 用于 边界框,P 用于多边形)或基于 SAM 的标注助手来加快标注速度。详细步骤可在 上传、转换并标注数据章节 中找到。
Link to this sectionRoboflow 为收集 YOLO26 训练数据提供哪些服务?#
Roboflow 提供 Universe(访问众多 数据集)和 Collect(通过网络摄像头自动收集图像)。这些工具有助于为你的 YOLO26 模型获取必要的 训练数据,并作为我们 数据收集指南 中概述策略的补充。
Link to this section如何使用 Roboflow 管理和分析我的 YOLO26 数据集?#
利用 Roboflow 的数据集搜索、标签管理和 Health Check 功能。搜索功能可通过文本或标签查找图像,而 Health Check 可分析数据集质量(类别平衡、图像大小等),从而在训练前指导改进。详情请参阅 数据集管理章节。
Link to this section如何从 Roboflow 导出我的 YOLO26 数据集?#
在 Roboflow 中创建一个数据集版本,应用所需的预处理和 数据增强,然后点击“Export Dataset”并选择 YOLO26 格式。该过程在 导出数据章节 中有详细说明。这能让你的数据准备好用于 Ultralytics 训练流水线。
Link to this section如何通过 Roboflow 集成和部署 YOLO26 模型?#
使用提供的 Python 脚本将你已训练的 YOLO26 权重上传到 Roboflow。这将创建一个可部署的 API 端点。有关脚本和说明,请参阅 上传自定义权重章节。在我们的文档中探索更多 部署选项。