Link to this sectionEstimación de velocidad con Ultralytics YOLO26 🚀#
Link to this section¿Qué es la estimación de velocidad?#
La estimación de velocidad es el proceso de calcular la tasa de movimiento de un objeto dentro de un contexto dado, empleado a menudo en aplicaciones de visión artificial. Usando Ultralytics YOLO26 ahora puedes calcular la velocidad de los objetos utilizando seguimiento de objetos junto con datos de distancia y tiempo, lo cual es crucial para tareas como el monitoreo de tráfico y la vigilancia. La precisión de la estimación de velocidad influye directamente en la eficiencia y fiabilidad de diversas aplicaciones, convirtiéndola en un componente clave en el avance de los sistemas inteligentes y los procesos de toma de decisiones en tiempo real.
Watch: Speed Estimation using Ultralytics YOLO26
Para obtener una visión más profunda sobre la estimación de velocidad, consulta nuestra entrada de blog: Ultralytics YOLO para la estimación de velocidad en proyectos de visión artificial
Link to this sectionVentajas de la estimación de velocidad#
- Control de tráfico eficiente: La estimación precisa de la velocidad ayuda a gestionar el flujo del tráfico, mejorando la seguridad y reduciendo la congestión en las carreteras.
- Navegación autónoma precisa: En sistemas autónomos como vehículos de conducción autónoma, una estimación de velocidad fiable garantiza una navegación del vehículo segura y precisa.
- Seguridad de vigilancia mejorada: La estimación de velocidad en analíticas de vigilancia ayuda a identificar comportamientos inusuales o posibles amenazas, mejorando la efectividad de las medidas de seguridad.
Link to this sectionAplicaciones en el mundo real#
| Transporte | Transporte |
|---|---|
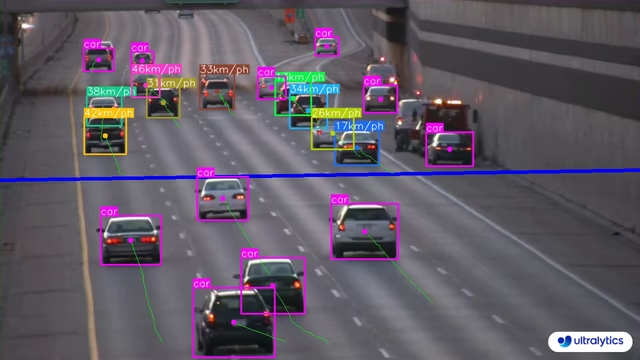 | 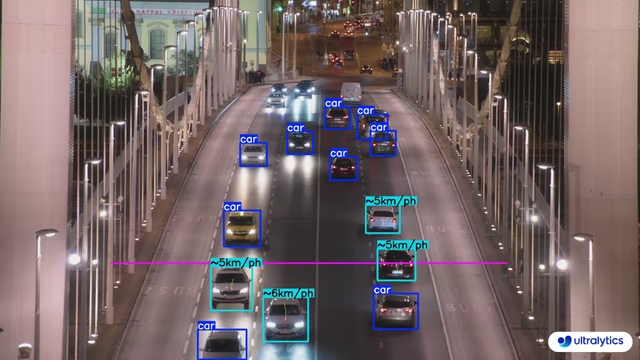 |
| Estimación de velocidad en carretera usando Ultralytics YOLO26 | Estimación de velocidad en puente usando Ultralytics YOLO26 |
La velocidad es una estimación
La velocidad será una estimación y puede no ser completamente precisa. Además, la estimación puede variar según las especificaciones de la cámara y factores relacionados.
Link to this sectionEstima la velocidad con YOLO26#
La solución SpeedEstimator rastrea cada objeto a través de los fotogramas y convierte su desplazamiento en píxeles a velocidad usando la frecuencia de fotogramas del vídeo (fps) y una escala del mundo real (meter_per_pixel). Ajusta meter_per_pixel para la configuración de tu cámara y usa max_speed para limitar los valores atípicos de los seguimientos con ruido.
# Run a speed example
yolo solutions speed show=True
# Pass a source video
yolo solutions speed source="path/to/video.mp4"
# Adjust meter per pixel value based on camera configuration
yolo solutions speed meter_per_pixel=0.05Link to this sectionArgumentos de SpeedEstimator#
Aquí tienes una tabla con los argumentos de SpeedEstimator:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
model | str | None | Ruta a un archivo de modelo YOLO de Ultralytics. |
fps | float | 30.0 | Fotogramas por segundo utilizados para los cálculos de velocidad. |
max_hist | int | 5 | Máximos puntos históricos a rastrear por objeto para los cálculos de velocidad/dirección. |
meter_per_pixel | float | 0.05 | Factor de escala utilizado para convertir la distancia de píxeles a unidades del mundo real. |
max_speed | int | 120 | Límite máximo de velocidad en superposiciones visuales (utilizado en alertas). |
La solución SpeedEstimator permite el uso de parámetros de track:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | Especifica el algoritmo de seguimiento a utilizar. Opciones integradas: botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | Establece el umbral de confianza para las detecciones; valores más bajos permiten el seguimiento de más objetos, pero pueden incluir falsos positivos. |
iou | float | 0.7 | Establece el umbral de Intersection over Union (IoU) para filtrar detecciones superpuestas. |
classes | list | None | Filtra los resultados por índice de clase. Por ejemplo, classes=[0, 2, 3] solo rastrea las clases especificadas. |
verbose | bool | True | Controla la visualización de los resultados de seguimiento, proporcionando una salida visual de los objetos rastreados. |
device | str | None | Especifica el dispositivo para la inferencia (p. ej., cpu, cuda:0 o 0). Permite a los usuarios seleccionar entre CPU, una GPU específica u otros dispositivos de computación para la ejecución del modelo. |
Además, se admiten las siguientes opciones de visualización:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
show | bool | False | Si es True, muestra las imágenes o vídeos anotados en una ventana. Útil para una retroalimentación visual inmediata durante el desarrollo o las pruebas. |
line_width | int or None | None | Especifica el ancho de línea de los cuadros delimitadores. Si es None, el ancho de línea se ajusta automáticamente según el tamaño de la imagen. Proporciona personalización visual para mayor claridad. |
show_conf | bool | True | Muestra la puntuación de confianza para cada detección junto a la etiqueta. Proporciona información sobre la certeza del modelo para cada detección. |
show_labels | bool | True | Muestra las etiquetas para cada detección en la salida visual. Proporciona una comprensión inmediata de los objetos detectados. |
Link to this sectionFAQ#
Link to this section¿Cómo estimo la velocidad de un objeto usando Ultralytics YOLO26?#
La estimación de la velocidad de objetos con Ultralytics YOLO26 combina la detección de objetos y el seguimiento. El modelo detecta objetos en cada fotograma, los sigue a través de los fotogramas y convierte la distancia recorrida entre fotogramas en una velocidad usando la frecuencia de fotogramas y la escala meter_per_pixel. El ejemplo en Python anterior ejecuta todo este flujo de trabajo: pasa tu vídeo y ajusta meter_per_pixel para tu cámara. Para obtener más información, consulta nuestra publicación oficial en el blog.
Link to this section¿Cuáles son los beneficios de usar Ultralytics YOLO26 para la estimación de velocidad en la gestión de tráfico?#
Usar Ultralytics YOLO26 para la estimación de velocidad ofrece ventajas significativas en la gestión de tráfico:
- Seguridad mejorada: Estima con precisión la velocidad de los vehículos para detectar excesos de velocidad y mejorar la seguridad vial.
- Monitoreo en tiempo real: Benefíciate de la capacidad de detección de objetos en tiempo real de YOLO26 para monitorear el flujo de tráfico y la congestión de manera efectiva.
- Escalabilidad: Despliega el modelo en diversas configuraciones de hardware, desde dispositivos de borde hasta servidores, garantizando soluciones flexibles y escalables para implementaciones a gran escala.
Para más aplicaciones, consulta las ventajas de la estimación de velocidad.
Link to this section¿Se puede integrar YOLO26 con otros marcos de trabajo de IA como TensorFlow o PyTorch?#
Sí, YOLO26 se puede integrar con otros marcos de trabajo de IA como TensorFlow y PyTorch. Ultralytics proporciona soporte para exportar modelos YOLO26 a varios formatos como ONNX, TensorRT y CoreML, asegurando una interoperabilidad fluida con otros marcos de ML.
Para exportar un modelo YOLO26 al formato ONNX:
yolo export model=yolo26n.pt format=onnxAprende más sobre cómo exportar modelos en nuestra guía sobre exportación.
Link to this section¿Qué tan precisa es la estimación de velocidad usando Ultralytics YOLO26?#
La precisión de la estimación de velocidad usando Ultralytics YOLO26 depende de varios factores, incluyendo la calidad del seguimiento de objetos, la resolución y la frecuencia de frames del video, y las variables ambientales. Si bien el estimador de velocidad proporciona estimaciones fiables, puede no ser 100% preciso debido a las variaciones en la velocidad de procesamiento de frames y la oclusión de objetos.
Nota: Considera siempre el margen de error y valida las estimaciones con datos reales (ground truth) cuando sea posible.
Para obtener más consejos sobre cómo mejorar la precisión, consulta la sección de Argumentos de SpeedEstimator.