Link to this sectionUltralytics YOLO11#
Link to this sectionDescripción general#
YOLO11 fue lanzado por Ultralytics el 10 de septiembre de 2024, ofreciendo una excelente precisión, velocidad y eficiencia. Partiendo de los impresionantes avances de las versiones anteriores de YOLO, YOLO11 introduce mejoras significativas en la arquitectura y en los métodos de entrenamiento, lo que lo convierte en una opción versátil para una amplia gama de tareas de visión artificial. Para conocer el modelo más reciente de Ultralytics con inferencia integral sin NMS y despliegue optimizado en el borde, consulta YOLO26.
Ultralytics YOLO11 🚀 Podcast generated by NotebookLM
Watch: How to Use Ultralytics YOLO11 for Object Detection and Tracking | How to Benchmark | YOLO11 RELEASED🚀
Explora y ejecuta modelos de YOLO11 directamente en Ultralytics Platform.
Link to this sectionCaracterísticas clave#
- Extracción de características mejorada: YOLO11 emplea una arquitectura de backbone y cuello mejorada, lo que mejora las capacidades de extracción de características para una detección de objetos más precisa y un rendimiento superior en tareas complejas.
- Optimizado para la eficiencia y la velocidad: YOLO11 introduce diseños arquitectónicos refinados y canalizaciones de entrenamiento optimizadas, lo que proporciona velocidades de procesamiento más rápidas y mantiene un equilibrio óptimo entre precisión y rendimiento.
- Mayor precisión con menos parámetros: Con avances en el diseño de modelos, YOLO11m logra una precisión media promedio (mAP) más alta en el conjunto de datos COCO mientras utiliza un 22% menos de parámetros que YOLOv8m, lo que lo hace computacionalmente eficiente sin comprometer la precisión.
- Adaptabilidad en todos los entornos: YOLO11 puede desplegarse perfectamente en diversos entornos, incluyendo dispositivos de borde, plataformas en la nube y sistemas compatibles con GPUs NVIDIA, asegurando la máxima flexibilidad.
- Amplia gama de tareas compatibles: Ya sea detección de objetos, segmentación de instancias, clasificación de imágenes, estimación de poses o detección de objetos orientados (OBB), YOLO11 está diseñado para abordar una diversa serie de desafíos de visión artificial.
Link to this sectionTareas y modos soportados#
YOLO11 se basa en la versátil gama de modelos establecida por lanzamientos anteriores de Ultralytics YOLO, ofreciendo una compatibilidad mejorada en diversas tareas de visión artificial:
| Modelo | Nombres de archivo | Tarea | Inferencia | Validación | Entrenamiento | Exportar |
|---|---|---|---|---|---|---|
| YOLO11 | yolo11n.pt yolo11s.pt yolo11m.pt yolo11l.pt yolo11x.pt | Detección | ✅ | ✅ | ✅ | ✅ |
| YOLO11-seg | yolo11n-seg.pt yolo11s-seg.pt yolo11m-seg.pt yolo11l-seg.pt yolo11x-seg.pt | Segmentación de instancias | ✅ | ✅ | ✅ | ✅ |
| YOLO11-pose | yolo11n-pose.pt yolo11s-pose.pt yolo11m-pose.pt yolo11l-pose.pt yolo11x-pose.pt | Pose/Puntos clave | ✅ | ✅ | ✅ | ✅ |
| YOLO11-obb | yolo11n-obb.pt yolo11s-obb.pt yolo11m-obb.pt yolo11l-obb.pt yolo11x-obb.pt | Detección orientada | ✅ | ✅ | ✅ | ✅ |
| YOLO11-cls | yolo11n-cls.pt yolo11s-cls.pt yolo11m-cls.pt yolo11l-cls.pt yolo11x-cls.pt | Clasificación | ✅ | ✅ | ✅ | ✅ |
Esta tabla proporciona una visión general de las variantes del modelo YOLO11, mostrando su aplicabilidad en tareas específicas y su compatibilidad con modos operativos como Inferencia, Validación, Entrenamiento y Exportación. Esta flexibilidad hace que YOLO11 sea adecuado para una amplia gama de aplicaciones de visión artificial, desde la detección en tiempo real hasta tareas complejas de segmentación.
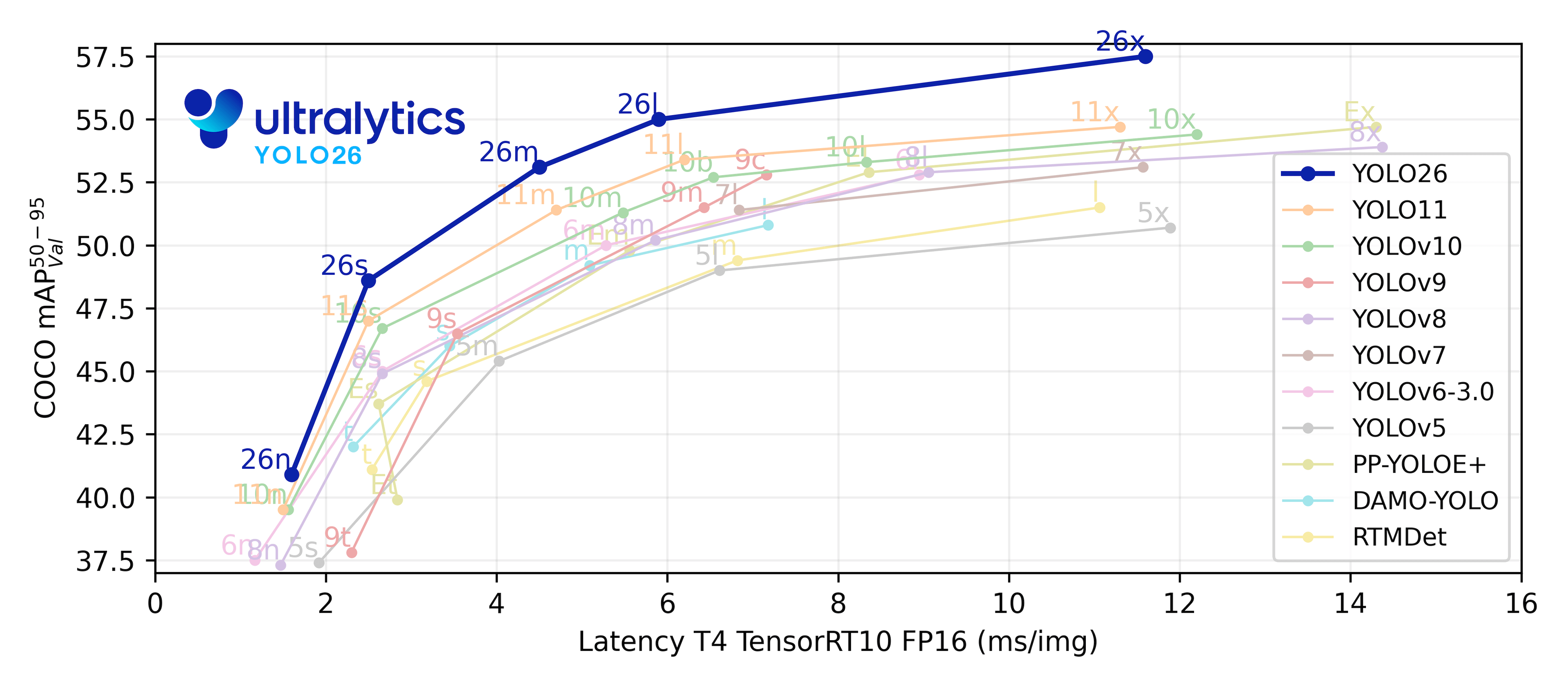
Link to this sectionMétricas de rendimiento#
Consulta la Documentación de detección para ver ejemplos de uso con estos modelos entrenados en COCO, que incluyen 80 clases preentrenadas.
| Modelo | tamaño (píxeles) | mAPval 50-95 | Velocidad CPU ONNX (ms) | Velocidad T4 TensorRT10 (ms) | params (M) | FLOPs (B) |
|---|---|---|---|---|---|---|
| YOLO11n | 640 | 39.5 | 56.1 ± 0.8 | 1.5 ± 0.0 | 2.6 | 6.5 |
| YOLO11s | 640 | 47.0 | 90.0 ± 1.2 | 2.5 ± 0.0 | 9.4 | 21.5 |
| YOLO11m | 640 | 51.5 | 183.2 ± 2.0 | 4.7 ± 0.1 | 20.1 | 68.0 |
| YOLO11l | 640 | 53.4 | 238.6 ± 1.4 | 6.2 ± 0.1 | 25.3 | 86.9 |
| YOLO11x | 640 | 54.7 | 462.8 ± 6.7 | 11.3 ± 0.2 | 56.9 | 194.9 |
Link to this sectionEjemplos de uso#
Esta sección proporciona ejemplos sencillos de entrenamiento e inferencia de YOLO11. Para consultar la documentación completa sobre estos y otros modos, visita las páginas de documentación de Predict, Train, Val y Export.
Ten en cuenta que el ejemplo siguiente es para modelos YOLO11 de detección para detección de objetos. Para otras tareas compatibles, consulta la documentación de Segment, Classify, OBB y Pose.
Se pueden pasar modelos PyTorch preentrenados *.pt, así como archivos de configuración *.yaml, a la clase YOLO() para crear una instancia del modelo en Python:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLO11n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")Link to this sectionCitas y agradecimientos#
Ultralytics no ha publicado un artículo de investigación formal para YOLO11 debido a la naturaleza de rápida evolución de los modelos. Nos centramos en avanzar la tecnología y facilitar su uso, en lugar de producir documentación estática. Para obtener la información más actualizada sobre la arquitectura, las características y el uso de YOLO, consulta nuestro repositorio de GitHub y nuestra documentación.
Si utilizas YOLO11 o cualquier otro software de este repositorio en tu trabajo, cítalo utilizando el siguiente formato:
@software{yolo11_ultralytics,
author = {Glenn Jocher and Jing Qiu},
title = {Ultralytics YOLO11},
version = {11.0.0},
year = {2024},
url = {https://github.com/ultralytics/ultralytics},
orcid = {0000-0001-5950-6979, 0000-0003-3783-7069},
license = {AGPL-3.0}
}Ten en cuenta que el DOI está pendiente y se añadirá a la cita en cuanto esté disponible. Los modelos YOLO11 se ofrecen bajo licencias AGPL-3.0 y Enterprise.
Link to this sectionFAQ#
Link to this section¿Cuáles son las mejoras clave en Ultralytics YOLO11 en comparación con YOLOv8?#
Ultralytics YOLO11 introduce avances significativos respecto a YOLOv8. Las mejoras clave incluyen:
- Extracción de características mejorada: YOLO11 emplea una arquitectura de backbone y neck mejorada, lo que optimiza las capacidades de extracción de características para una detección de objetos más precisa.
- Eficiencia y velocidad optimizadas: Los diseños arquitectónicos refinados y los procesos de entrenamiento optimizados ofrecen velocidades de procesamiento más rápidas manteniendo un equilibrio entre precisión y rendimiento.
- Mayor precisión con menos parámetros: YOLO11m logra una mayor precisión media (mAP) en el conjunto de datos COCO con un 22% menos de parámetros que YOLOv8m, lo que lo hace computacionalmente eficiente sin comprometer la precisión.
- Adaptabilidad en distintos entornos: YOLO11 se puede implementar en diversos entornos, incluyendo dispositivos de borde (edge), plataformas en la nube y sistemas compatibles con GPUs de NVIDIA.
- Amplia gama de tareas compatibles: YOLO11 admite diversas tareas de visión artificial como detección de objetos, segmentación de instancias, clasificación de imágenes, estimación de poses y detección de objetos orientados (OBB).
Link to this section¿Cómo entreno un modelo YOLO11 para la detección de objetos?#
El entrenamiento de un modelo YOLO11 para la detección de objetos se puede realizar mediante Python o comandos CLI. A continuación, verás ejemplos para ambos métodos:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)Para instrucciones más detalladas, consulta la documentación de Train.
Link to this section¿Qué tareas pueden realizar los modelos YOLO11?#
Los modelos YOLO11 son versátiles y admiten una amplia gama de tareas de visión artificial, que incluyen:
- Detección de objetos: Identificar y localizar objetos dentro de una imagen.
- Segmentación de instancias: Detectar objetos y delimitar sus contornos.
- Clasificación de imágenes: Categorizar imágenes en clases predefinidas.
- Estimación de poses: Detectar y seguir puntos clave en cuerpos humanos.
- Detección de objetos orientados (OBB): Detectar objetos con rotación para una mayor precisión.
Para obtener más información sobre cada tarea, consulta la documentación de Detection, Instance Segmentation, Classification, Pose Estimation y Oriented Detection.
Link to this section¿Cómo logra YOLO11 mayor precisión con menos parámetros?#
YOLO11 logra una mayor precisión con menos parámetros gracias a los avances en el diseño del modelo y las técnicas de optimización. La arquitectura mejorada permite una extracción y procesamiento eficientes de las características, lo que resulta en una mayor precisión media (mAP) en conjuntos de datos como COCO, utilizando un 22% menos de parámetros que YOLOv8m. Esto hace que YOLO11 sea computacionalmente eficiente sin sacrificar precisión, permitiendo su despliegue en dispositivos con recursos limitados.
Link to this section¿Se puede implementar YOLO11 en dispositivos de borde (edge)?#
Sí, YOLO11 está diseñado para adaptarse a diversos entornos, incluyendo dispositivos de borde. Su arquitectura optimizada y sus capacidades de procesamiento eficiente lo hacen apto para el despliegue en dispositivos de borde, plataformas en la nube y sistemas compatibles con GPUs de NVIDIA. Esta flexibilidad garantiza que YOLO11 pueda utilizarse en aplicaciones muy diversas, desde detección en tiempo real en dispositivos móviles hasta tareas de segmentación complejas en entornos de nube. Para más detalles sobre las opciones de despliegue, consulta la documentación de Export.