Link to this sectionコンピュータビジョンプロジェクトの目標定義方法#
コンピュータビジョンプロジェクトを定義するには、核心的な課題、スコープ、関係者、制約を明記した問題定義書を作成します。また、測定可能で期限を設けた目標を設定し、その課題を、モデル、データセット、デプロイメントの判断を決定づけるコンピュータビジョンタスクにマッピングします。本ガイドでは、具体的な例を交えながら各ステップを解説します。
Watch: How to define Computer Vision Project's Goal | Problem Statement and VisionAI Tasks Connection 🚀
データ収集からデプロイメントまでのワークフロー全体については、コンピュータビジョンプロジェクトの主要ステップに関するガイドを参照してください。
Link to this sectionコンピュータビジョンの問題定義書の作成方法#
明確な問題定義書は、最も効果的な解決策を見つけるための重要な第一歩です。これには4つの要素があります。
- 核心となる問題を特定する: コンピュータビジョンプロジェクトで解決を目指す具体的な課題を絞り込みます。
- 範囲を決定する: 問題の境界線を定義します。
- エンドユーザーとステークホルダーを考慮する: ソリューションによって影響を受ける関係者を特定します。
- プロジェクトの要件と制約を分析する: 利用可能なリソース(時間、予算、人員)を評価し、技術的または規制上の制約があれば特定します。
Link to this sectionビジネス課題の記述例#
高速道路での車両速度推定を行うコンピュータビジョンプロジェクトを検討します。核心となる問題は、従来のレーダーシステムや手動による処理が時代遅れであり、現在の速度監視手法が非効率でエラーが発生しやすいという点です。このプロジェクトは、既存の速度推定システムを置き換えるリアルタイムのコンピュータビジョンシステムを開発することを目的としています。
主なユーザーには交通管理当局や法執行機関が含まれ、二次的なステークホルダーには高速道路の計画担当者や、より安全な道路の恩恵を受ける一般市民が含まれます。主要な要件には、予算、時間、人員の評価に加え、高解像度カメラやリアルタイムのデータ処理といった技術的ニーズへの対応が含まれます。さらに、プライバシーとデータセキュリティに関する規制上の制約も考慮しなければなりません。
Link to this section測定可能な目標の設定#
測定可能な目標の設定は、コンピュータビジョンプロジェクトの成功に不可欠です。効果的な目標はSMART基準に従います。
| 基準 | 定義 |
|---|---|
| Specific(具体的) | 目標を明確かつ詳細に定義する。 |
| Measurable(測定可能) | 目標を定量化できるようにする。 |
| Achievable(達成可能) | 能力の範囲内で現実的なターゲットを設定する。 |
| Relevant(関連性) | 目標をプロジェクト全体のゴールと一致させる。 |
| Time-bound(期限設定) | 各目標に締め切りを設定する。 |
高速道路の速度推定の例では、SMART目標は以下のようになります。
- 10,000枚の車両画像データセットを使用して、6か月以内に速度検出の精度を少なくとも95%にすること。
- システムは、最小限の遅延で毎秒30フレームのリアルタイム映像フィードを処理できなければならない。
具体的かつ定量的な目標を設定することで、進捗を効果的に追跡し、改善の余地を特定し、プロジェクトを確実に計画通りに進めることができます。
Link to this section適切なコンピュータビジョンタスクの選び方#
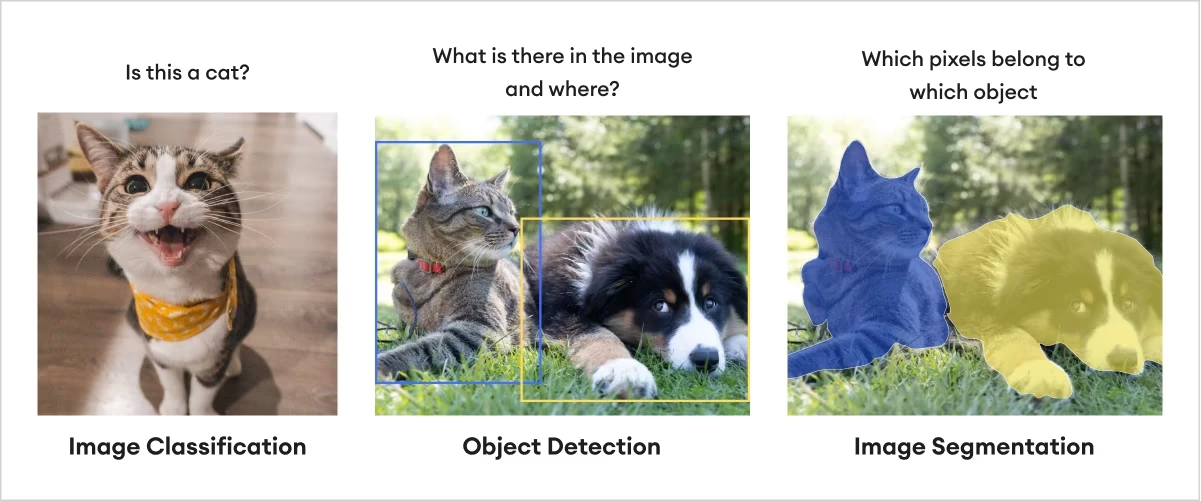
問題定義書を作成することで、どのコンピュータビジョンタスクが問題を解決できるかを概念化しやすくなります。代表的なタスクには画像分類、物体検出、画像セグメンテーションなどがあります。詳細な比較については、Ultralyticsタスクページを参照してください。
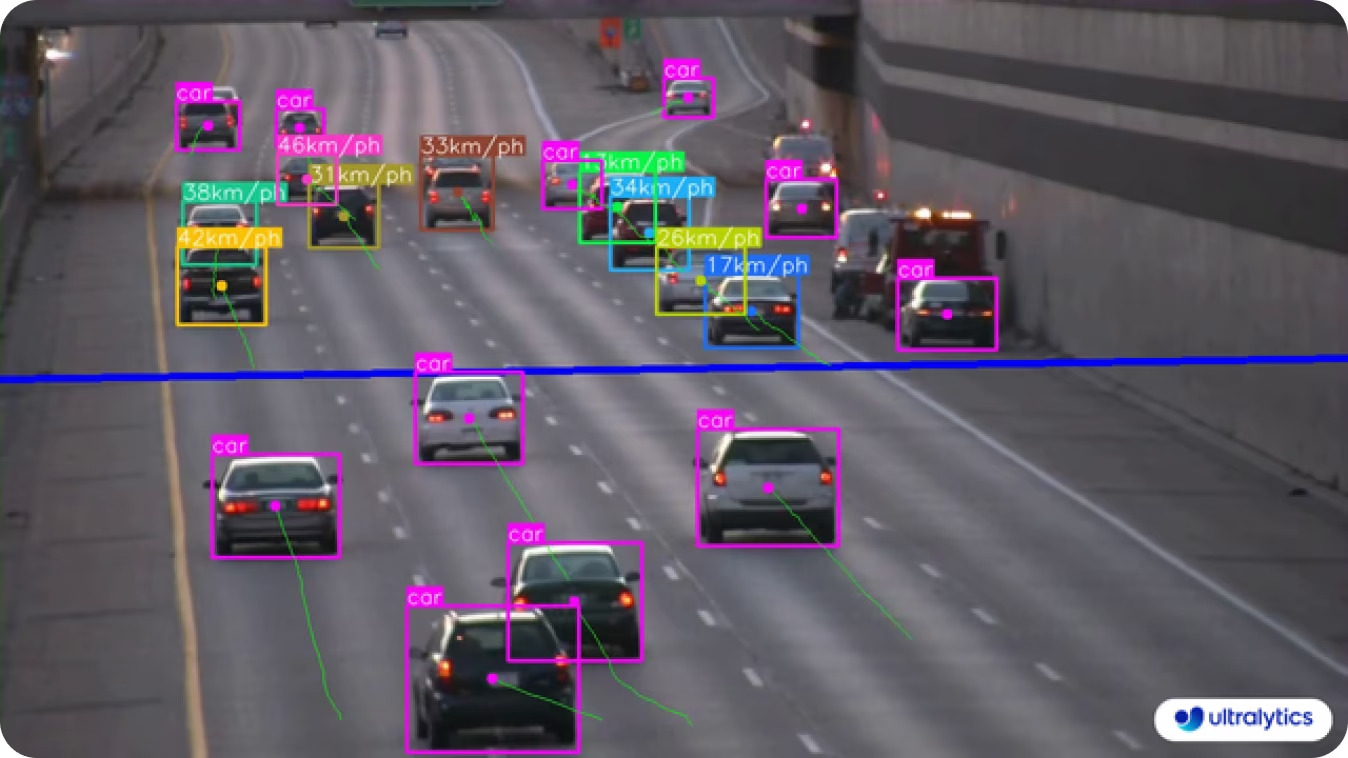
例えば、高速道路上の車両の速度を監視する場合、関連するタスクは物体追跡です。追跡は、速度計算に必要な各車両の永続的なIDを用いて、ビデオフレーム全体で車両を追跡できるため、この目的に適しています。
![]()
他のタスクは、単体ではあまり適していません。例えば、物体検出は各フレーム内の車両の位置を特定しますが、フレーム間で各車両の同一性を維持しません。同一性を維持できなければ、システムは時間経過に伴う動きを測定できません。適切なコンピュータビジョンタスクを特定すれば、モデルの選択、データセットの準備、モデルのトレーニング手法など、プロジェクトの重要な側面の指針となります。
Link to this section何から始めるべきか:モデル、データ、それともトレーニング手法?#
モデル選択、データセット準備、トレーニング手法の順序は、プロジェクトの詳細によって異なります。
| 状況 | 最初にすること | 例 |
|---|---|---|
| 明確な問題と目標がある場合 | モデル選択 | 車両速度を推定する交通監視システムの場合、物体追跡モデルを選択し、高速道路のビデオを収集およびアノテーションして、リアルタイムビデオ処理技術でトレーニングします。 |
| 独自または限られたデータがある場合 | データセット準備 | 小規模なデータセットで顔認識システムを構築する場合、まずデータにアノテーションを行い、転移学習用の事前学習済みモデルなど、データが少なくても機能するモデルを選択し、データセットを拡張するためのデータ拡張を計画します。 |
| 実験が重要な場合(研究) | トレーニング手法 | 製造上の欠陥を検出する新しい手法を模索するプロジェクトでは、まずデータの小さなサブセットで実験します。有望な手法が見つかったら、その知見に基づいてモデルを選択し、包括的なデータセットを準備します。 |
データから始める場合、Ultralytics Platformはプロジェクトの発展に合わせて、データセットの整理、アノテーション、トレーニングを簡素化します。
Link to this sectionデプロイメントの選択肢がプロジェクトに与える影響#
モデルデプロイメントの選択肢はコンピュータビジョンプロジェクトのパフォーマンスに大きな影響を与えるため、最初から考慮に入れてください。デプロイメント環境は、モデルの計算負荷を処理できる必要があります。
| デプロイメントの選択肢 | 最適 | テクノロジーの例 |
|---|---|---|
| エッジデバイス | リソースが限られたスマートフォンやIoTデバイス、軽量モデル | LiteRT, ONNX Runtime |
| クラウドサーバー | 高い計算負荷を必要とする複雑なモデル、スケーラブルなハードウェア | AWS, Google Cloud, Azure |
| オンプレミスサーバー | 高いデータプライバシーとセキュリティが必要、データとインフラの完全な制御 | セルフマネージドGPUサーバー |
| ハイブリッドソリューション | パフォーマンス、コスト、レイテンシのバランス、エッジ処理とクラウド分析の組み合わせ | エッジランタイムとクラウドプラットフォームの組み合わせ |
各選択肢には利点と課題があり、選択はパフォーマンス、コスト、セキュリティといったプロジェクトの特定の要件に依存します。
Link to this section結論#
成功するコンピュータビジョンプロジェクトは、明確な問題定義書、SMART測定可能目標、およびタスクに適した適切なコンピュータビジョンタスクから始まります。これらの決定が、モデル選択からデプロイメントまで、後続のすべての指針となります。次のステップとして、データの収集とアノテーションについて学ぶか、GitHubおよびUltralytics Discordサーバーで他の開発者とプロジェクトについて議論してください。
Link to this sectionよくある質問 (FAQ)#
Link to this sectionコンピュータビジョンプロジェクトの明確な問題定義書を記述するにはどうすればよいですか?#
明確な問題定義書には、プロジェクトで解決する核心的な課題、スコープ、エンドユーザーと関係者、リソースと規制上の制約を記載します。これら4つの要素を順に検討し、技術的な決定を下す前に、関係者と定義書の内容を検証してください。詳細な内訳と実例については、コンピュータビジョンの問題定義書の作成方法を参照してください。
Link to this section問題に対して適切なコンピュータビジョンタスクを選択するにはどうすればよいですか?#
問題が必要とする出力と、それを生成するタスクを一致させます。画像あたり1つのラベルは画像分類を指し、物体の場所は物体検出を指し、ピクセルレベルの境界は画像セグメンテーションを指し、ビデオフレーム間で維持されるIDは物体追跡を指します。例えば、車両速度の監視には、速度が各車両の時間経過に伴う動きから計算されるため、追跡が必要です。サポートされているすべてのタスクについては、Ultralyticsタスクページを参照してください。
Link to this sectionコンピュータビジョンプロジェクトの効果的で測定可能な目標を設定するにはどうすればよいですか?#
Specific(具体的)、Measurable(測定可能)、Achievable(達成可能)、Relevant(関連性)、Time-bound(期限設定)というSMART基準を使用してください。例として、「10,000台の車両画像データセットを使用して、6か月以内に速度検出精度95%を達成する」などが挙げられます。このアプローチにより、進捗状況を追跡し、改善が必要な領域を特定できます。測定可能な目標の設定について詳しく読んでください。
Link to this section事前学習済みモデルは、カスタムトレーニング前に知っていたクラスを記憶できますか?#
いいえ、事前学習済みモデルは従来の意味での「記憶」はしません。モデルは膨大なデータセットからパターンを学習し、カスタムトレーニング(微調整)中にこれらのパターンが特定のタスクに合わせて調整されます。モデルの容量には限りがあるため、新しい情報に重点を置くと、以前の学習の一部が上書きされる可能性があります。
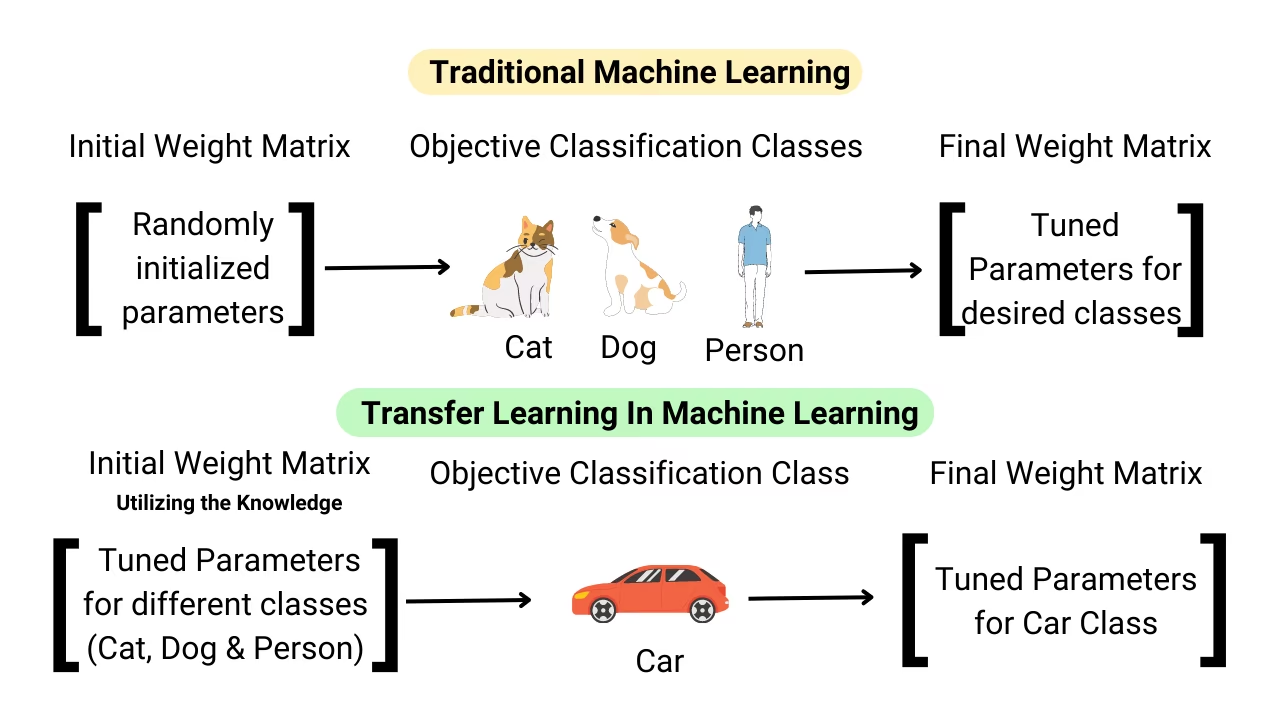
モデルが事前学習されたクラスを使用したい場合、実用的なアプローチとして、元の性能を維持するモデルと、特定のタスク用に微調整されたモデルの2つを使用する方法があります。これにより、両方のモデルの出力を組み合わせることができます。他にも層の凍結、特徴抽出器としての使用、タスク固有の分岐などがありますが、これらはより複雑なソリューションであり、高度な専門知識が必要となります。
Link to this sectionデプロイメントの選択肢はコンピュータビジョンプロジェクトにどのような影響を与えますか?#
デプロイメントの選択肢は、利用可能なモデルのサイズと形式を決定するため、プロジェクトの初期段階からその構成を左右します。エッジデバイスには、LiteRTやONNX Runtimeのようなフォーマットやランタイムを通じて提供される軽量モデルが必要であり、クラウドサーバーはスケーラブルなハードウェア上で複雑なモデルを処理します。オンプレミスサーバーは、プライバシーに配慮が必要なプロジェクトに対して完全なデータ制御を提供し、ハイブリッド構成はその両者のバランスを取ります。デプロイメントオプションの表でそれらを比較するか、詳細はモデルデプロイメントオプションガイドを参照してください。
Link to this sectionコンピュータビジョンの問題を定義する際の最も一般的な課題は何ですか?#
一般的な課題は以下の通りです。
- 曖昧または広すぎる問題定義。
- 非現実的な目標。
- ステークホルダー間の認識の不一致。
- 技術的な制約に対する理解不足。
- データ要件の過小評価。
これらの課題には、徹底的な初期調査、関係者との明確なコミュニケーション、そして問題定義と目標の反復的な改善を通じて対処してください。プロジェクトの全ワークフローについては、コンピュータビジョンプロジェクトの主要ステップを参照してください。