コンピュータビジョンプロジェクトを定義するための実践的なガイド
はじめに
コンピュータービジョンプロジェクトの最初のステップは、達成したいことを定義することです。データ収集からモデルのデプロイまで、すべてを含む明確なロードマップを最初から用意することが重要です。
見る: コンピュータビジョンプロジェクトの目標を定義する方法 | 問題定義とVisionAIタスクの関連性 🚀
コンピュータービジョンプロジェクトの基本を素早く復習したい場合は、コンピュータービジョンプロジェクトの主要なステップに関するガイドをぜひお読みください。これにより、プロセス全体の確かな概要を把握できます。理解を深めたら、ここに戻って、プロジェクトの目標をどのように正確に定義し、洗練させるかについて深く掘り下げていきましょう。
次に、プロジェクトの明確な問題定義の中核に入り、その過程で下す必要のある重要な決定事項を検討します。
明確な問題定義
プロジェクトの明確な目標と目的を設定することは、最も効果的なソリューションを見つけるための最初の大きなステップです。プロジェクトの問題定義を明確に定義する方法を理解しましょう。
- コアな問題を特定する: コンピュータビジョンプロジェクトが解決を目指す具体的な課題を特定します。
- スコープの決定: 問題の範囲を定義します。
- エンドユーザーとステークホルダーを考慮する: ソリューションによって誰が影響を受けるかを特定します。
- プロジェクトの要件と制約の分析: 利用可能なリソース(時間、予算、人員)を評価し、技術的または規制上の制約を特定します。
ビジネス問題ステートメントの例
例を見ていきましょう。
高速道路での車両の速度を推定するコンピュータビジョンプロジェクトを検討してください。根本的な問題は、現在の速度監視方法が、時代遅れのレーダーシステムと手作業によるプロセスのために非効率的でエラーが発生しやすいことです。このプロジェクトは、従来の速度推定システムを置き換えることができるリアルタイムコンピュータビジョンシステムを開発することを目的としています。
主なユーザーは交通管理当局と法執行機関であり、二次的な利害関係者は高速道路計画者とより安全な道路の恩恵を受ける一般市民です。重要な要件には、予算、時間、人員の評価、および高解像度カメラやリアルタイムデータ処理などの技術的なニーズへの対応が含まれます。さらに、プライバシーとデータセキュリティに関する規制上の制約を考慮する必要があります。
測定可能な目標の設定
測定可能な目標を設定することは、コンピュータビジョンプロジェクトを成功させるための鍵となります。これらの目標は、明確で、達成可能で、時間制約があるべきです。
例えば、高速道路での車両速度を推定するシステムを開発している場合、以下の測定可能な目標を検討できます。
- 10,000枚の車両画像のデータセットを使用して、6か月以内に速度検出で少なくとも95%の精度を達成するため。
- システムは、最小限の遅延で、リアルタイムのビデオフィードを毎秒30フレームで処理できる必要があります。
具体的な数値目標を設定することで、進捗状況を効果的に追跡し、改善点を特定し、プロジェクトが順調に進むことを確実にできます。
問題文とコンピュータビジョンタスクの関連性
問題文は、どのコンピュータビジョンタスクが問題を解決できるかを概念化するのに役立ちます。
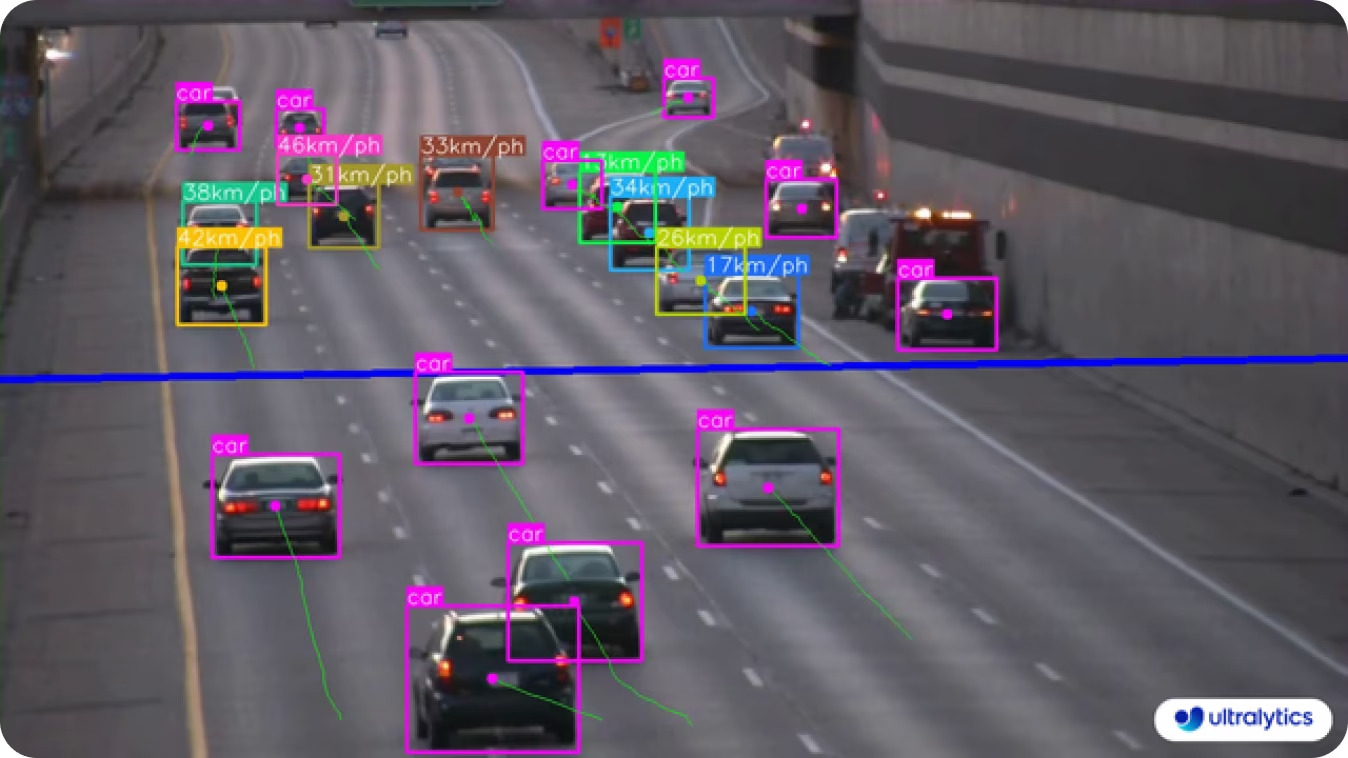
たとえば、高速道路での車両速度を監視することが問題である場合、関連するコンピュータビジョンのタスクは物体追跡です。物体追跡は、システムがビデオフィード内の各車両を継続的に追跡できるため、速度を正確に計算するために不可欠です。
![]()
物体検出のような他のタスクは、連続的な位置や動きの情報を提供しないため、適切ではありません。適切なコンピュータビジョンタスクを特定すると、モデルの選択、データセットの準備、モデルのトレーニングアプローチなど、プロジェクトのいくつかの重要な側面が導かれます。
モデルの選択、データセットの準備、またはモデルのトレーニングアプローチのどれが最初に来ますか?
モデルの選択、データセットの準備、およびトレーニングアプローチの順序は、プロジェクトの具体的な内容によって異なります。決定を支援するためのヒントをいくつか示します。
問題の明確な理解: 問題と目的が明確に定義されている場合は、モデルの選択から始めてください。次に、データセットを準備し、モデルの要件に基づいてトレーニングアプローチを決定します。
- 例: まず、車両速度を推定する交通監視システム用のモデルを選択します。オブジェクト追跡モデルを選択し、高速道路のビデオを収集してアノテーションを付け、リアルタイムビデオ処理の手法を用いてモデルをトレーニングします。
ユニークまたは限られたデータ: プロジェクトがユニークまたは限られたデータによって制約されている場合は、データセットの準備から始めてください。たとえば、まれな医療画像のデータセットがある場合は、最初にデータにアノテーションを付けて準備します。次に、そのようなデータで優れたパフォーマンスを発揮するモデルを選択し、適切なトレーニングアプローチを選択します。
実験の必要性: 実験が重要なプロジェクトでは、トレーニングアプローチから始めてください。これは、さまざまなトレーニング手法を最初にテストする可能性のある研究プロジェクトで一般的です。有望な方法を特定した後、モデルの選択を絞り込み、調査結果に基づいてデータセットを準備します。
- 例: 製造上の欠陥を検出する新しい手法を検討するプロジェクトでは、まず小規模なデータサブセットで実験を開始します。有望な手法が見つかったら、その結果に合わせて調整されたモデルを選択し、包括的なデータセットを準備します。
コミュニティにおける共通の議論点
次に、コンピュータビジョンタスクとプロジェクト計画に関するコミュニティでの一般的な議論のポイントをいくつか見てみましょう。
さまざまなコンピュータビジョンタスクとは何ですか?
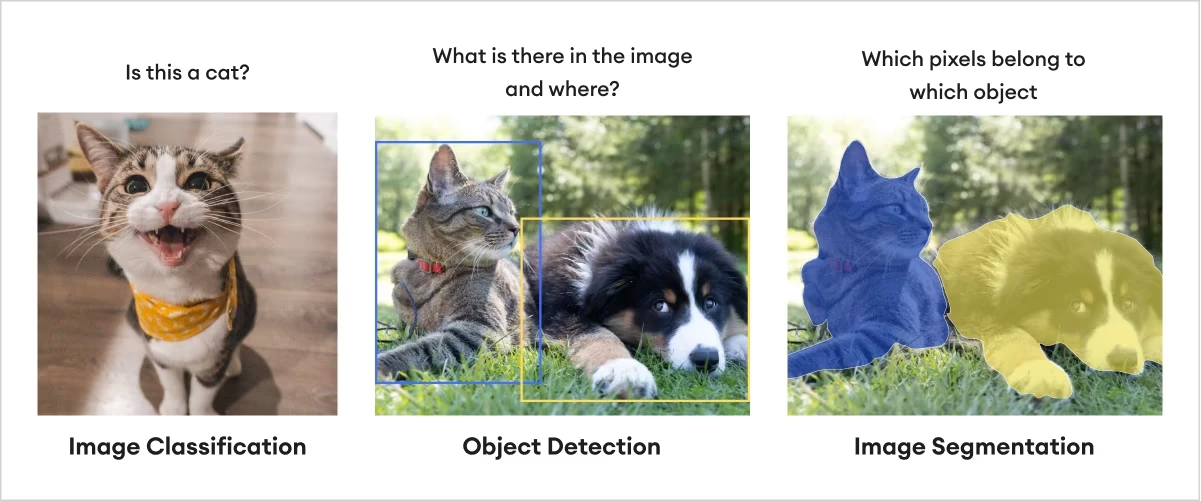
最も一般的なコンピュータービジョンタスクには、画像分類、物体検出、および画像セグメンテーションが含まれます。
様々なタスクの詳細については、YOLO26タスクに関するUltralyticsドキュメントページをご覧ください。
事前学習済みモデルは、カスタムトレーニング前に認識していたクラスを「記憶」できるか?
いいえ、事前学習済みモデルは従来の意味でクラスを「記憶」しません。これらは大規模なデータセットからパターンを学習し、カスタムトレーニング(ファインチューニング)中に、これらのパターンが特定のタスクに合わせて調整されます。モデルの容量は限られており、新しい情報に焦点を当てることで、以前の学習の一部が上書きされる可能性があります。
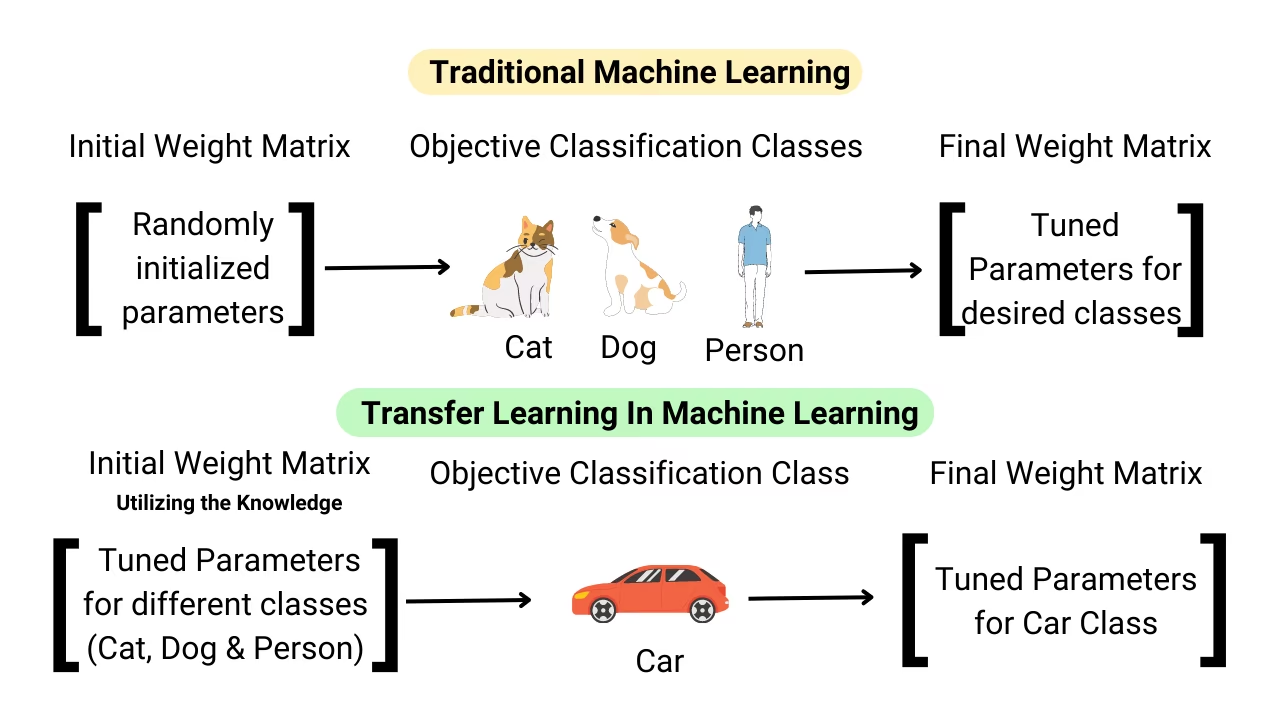
モデルが事前学習されたクラスを使用したい場合、実用的なアプローチは2つのモデルを使用することです。一方は元の性能を維持し、もう一方は特定のタスク向けにファインチューニングされます。このようにして、両方のモデルの出力を組み合わせることができます。レイヤーの凍結、事前学習済みモデルを特徴抽出器として使用すること、タスク固有の分岐などの他のオプションもありますが、これらはより複雑なソリューションであり、より専門的な知識が必要です。
デプロイメントの選択肢は、コンピュータビジョンプロジェクトにどのように影響しますか?
モデルのデプロイオプションは、コンピュータビジョンプロジェクトのパフォーマンスに大きく影響します。たとえば、デプロイ環境はモデルの計算負荷を処理できる必要があります。以下に、いくつかの実用的な例を示します。
- エッジデバイス: スマートフォンや IoT デバイスなどのエッジデバイスにデプロイするには、計算リソースが限られているため、軽量モデルが必要です。例としては、そのような環境向けに最適化されたTensorFlow LiteやONNX Runtimeなどのテクノロジーがあります。
- クラウドサーバー: クラウドデプロイメントは、より大きな計算需要を伴うより複雑なモデルを処理できます。 AWS、Google Cloud、Azureなどのクラウドプラットフォームは、プロジェクトのニーズに基づいて拡張できる堅牢なハードウェアオプションを提供します。
- オンプレミスサーバー: 高いデータプライバシーとセキュリティが要求されるシナリオでは、オンプレミスでのデプロイが必要となる場合があります。これには多額の初期ハードウェア投資が必要となりますが、データとインフラストラクチャを完全に制御できます。
- ハイブリッドソリューション: プロジェクトによっては、エッジで一部の処理を行い、より複雑な分析をクラウドにオフロードするハイブリッドアプローチが有効な場合があります。これにより、パフォーマンスのニーズとコストやレイテンシの考慮事項のバランスを取ることができます。
各デプロイメントオプションは、異なる利点と課題を提供し、パフォーマンス、コスト、セキュリティなどの特定のプロジェクト要件に応じて選択肢が決まります。
コミュニティと繋がる
他のコンピュータビジョン愛好家と繋がることは、サポート、ソリューション、新しいアイデアを得ることで、プロジェクトに非常に役立ちます。学び、トラブルシューティングを行い、ネットワークを構築するための優れた方法をいくつかご紹介します。
コミュニティサポートチャネル
- GitHub Issues: YOLO26のGitHubリポジトリにアクセスしてください。Issuesタブを使用して、質問をしたり、バグを報告したり、機能を提案したりできます。コミュニティとメンテナーが、遭遇する特定の問題を支援できます。
- Ultralytics Discordサーバー: Ultralytics Discordサーバーに参加してください。他のユーザーや開発者と繋がり、サポートを求めたり、知識を交換したり、アイデアについて話し合ったりできます。
包括的なガイドとドキュメント
- Ultralytics YOLO26 Documentation: 様々なコンピュータービジョンタスクやプロジェクトに関する詳細なガイドや貴重なヒントについては、公式YOLO26ドキュメントをご覧ください。
結論
明確な問題を定義し、測定可能な目標を設定することは、コンピュータビジョンプロジェクトを成功させるための鍵です。私たちは、最初から明確かつ集中的に取り組むことの重要性を強調してきました。具体的な目標を持つことで、見落としを防ぐことができます。また、GitHubやDiscordのようなプラットフォームを通じてコミュニティの他のメンバーとつながり続けることは、学習し、最新情報を得る上で重要です。要するに、優れた計画とコミュニティとの連携は、コンピュータビジョンプロジェクトの成功に大きく貢献します。
よくある質問
Ultralyticsコンピュータビジョンプロジェクトの明確な問題定義を作成するにはどうすればよいですか?
Ultralyticsのコンピュータビジョンプロジェクトの明確な問題定義を作成するには、次の手順に従ってください。
- コアな問題を特定する: プロジェクトが解決を目指す具体的な課題を特定します。
- 範囲の決定: 問題の境界を明確に概説します。
- エンドユーザーとステークホルダーを考慮する: あなたのソリューションによって誰が影響を受けるかを特定します。
- プロジェクトの要件と制約の分析: 利用可能なリソースと、技術的または規制上の制約を評価します。
明確に定義された問題定義を提供することで、プロジェクトが焦点からずれず、目標と一致していることを保証します。詳細なガイドについては、実践ガイドを参照してください。
コンピュータービジョンプロジェクトで速度推定にUltralytics YOLO26を使用すべき理由は何ですか?
Ultralytics YOLO26は、リアルタイムのオブジェクトtrack機能、高い精度、車両速度をdetectおよび監視する堅牢なパフォーマンスにより、速度推定に最適です。最先端のコンピュータービジョン技術を活用することで、従来のレーダーシステムの非効率性や不正確さを克服します。YOLO26を使用した速度推定に関する当社のブログで、さらなる洞察と実践的な例をご覧ください。
Ultralytics YOLO26を使用したコンピュータービジョンプロジェクトで、効果的で測定可能な目標を設定するにはどうすればよいですか?
SMART基準を使用して、効果的かつ測定可能な目標を設定します。
- Specific(明確性): 明確かつ詳細な目標を定義します。
- 測定可能: 目標が定量化可能であることを確認します。
- 達成可能: あなたの能力の範囲内で現実的な目標を設定してください。
- 関連性: 目標をプロジェクト全体の目標と一致させます。
- 時間制約: 各目標に締め切りを設定します。
例えば、「10,000台の車両画像データセットを使用して、6ヶ月以内に速度検出で95%の精度を達成する。」といった目標です。このアプローチは、進捗状況を追跡し、改善点を特定するのに役立ちます。測定可能な目標の設定について、さらに詳しくお読みください。
デプロイメントの選択肢は、Ultralytics YOLO モデルのパフォーマンスにどのように影響しますか?
デプロイメントオプションは、Ultralytics YOLOモデルのパフォーマンスに大きく影響します。主なオプションを以下に示します。
- エッジデバイス: リソースが限られたデバイスにデプロイするには、TensorFlow Lite や ONNX Runtime などの軽量モデルを使用します。
- クラウドサーバー: 複雑なモデルを処理するために、AWS、Google Cloud、Azureなどの堅牢なクラウドプラットフォームを利用してください。
- オンプレミスサーバー: 高いデータプライバシーとセキュリティのニーズには、オンプレミスでのデプロイが必要となる場合があります。
- ハイブリッドソリューション: バランスの取れたパフォーマンスとコスト効率のために、エッジアプローチとクラウドアプローチを組み合わせます。
詳細については、モデルのデプロイオプションに関する詳細ガイドをご覧ください。
Ultralyticsを用いたコンピュータビジョンプロジェクトにおいて、問題定義で最もよくある課題は何ですか?
一般的な課題は次のとおりです。
- 曖昧または広すぎる問題定義。
- 非現実的な目標。
- ステークホルダー間の連携不足。
- 技術的な制約に対する理解が不十分。
- データ要件の過小評価。
徹底的な初期調査、関係者との明確なコミュニケーション、および問題のステートメントと目標の反復的な改善を通じて、これらの課題に対処します。これらの課題の詳細については、コンピュータービジョンプロジェクトガイドをご覧ください。






