Link to this sectionUltralytics YOLO26 على NVIDIA Jetson باستخدام DeepStream SDK و TensorRT#
Watch: How to use Ultralytics YOLO26 models with NVIDIA Deepstream on Jetson Orin NX 🚀
يقدم هذا الدليل الشامل شرحاً مفصلاً لنشر نماذج Ultralytics YOLO26 على أجهزة NVIDIA Jetson باستخدام DeepStream SDK و TensorRT. نستخدم هنا TensorRT لتعظيم أداء الاستنتاج على منصة Jetson.
يستعرض هذا الدليل تكوين DeepStream لـ YOLO26، ومعايرة INT8، وإعداد البث المتعدد، ونتائج القياس.
تم اختبار هذا الدليل باستخدام NVIDIA Jetson Orin Nano Super Developer Kit الذي يعمل بأحدث إصدار مستقر من JetPack وهو JP6.1، و Seeed Studio reComputer J4012 الذي يعتمد على NVIDIA Jetson Orin NX 16GB ويعمل بإصدار JetPack JP5.1.3، و Seeed Studio reComputer J1020 v2 الذي يعتمد على NVIDIA Jetson Nano 4GB ويعمل بإصدار JetPack JP4.6.4. من المتوقع أن يعمل هذا الدليل عبر جميع عتاد NVIDIA Jetson بما في ذلك الأجهزة الحديثة والقديمة.
Link to this sectionما هو NVIDIA DeepStream؟#
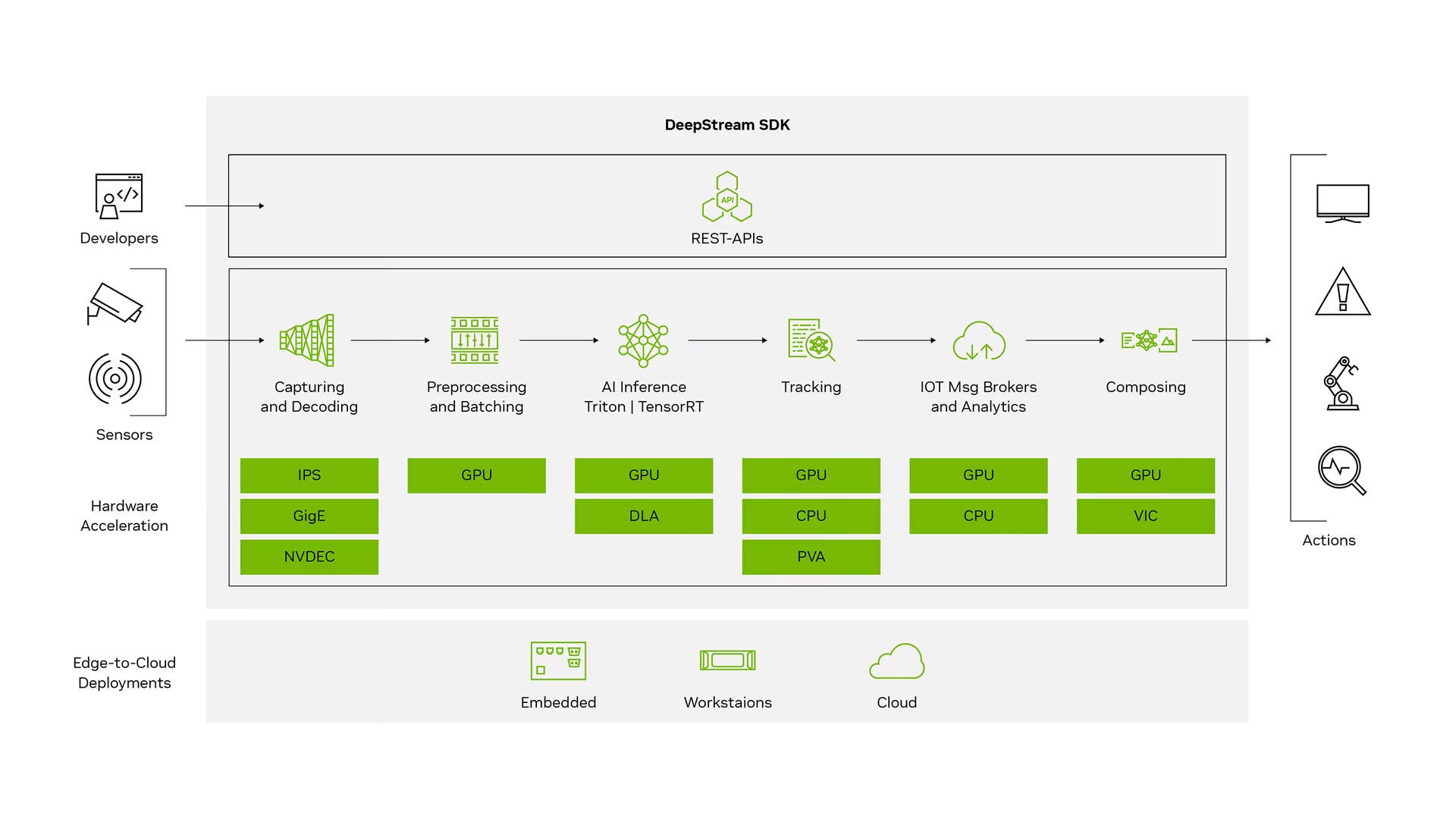
NVIDIA's DeepStream SDK عبارة عن مجموعة أدوات متكاملة لتحليلات البث تعتمد على GStreamer لمعالجة المستشعرات المتعددة المستندة إلى الذكاء الاصطناعي، وفهم الفيديو، والصوت، والصور. إنها مثالية لمطوري رؤية الحاسوب بالذكاء الاصطناعي، وشركاء البرمجيات، والشركات الناشئة، ومصنعي المعدات الأصلية (OEMs) الذين يبنون تطبيقات وخدمات IVA (تحليلات الفيديو الذكية). يمكنك الآن إنشاء خطوط أنابيب لمعالجة البث تدمج الشبكات العصبية ومهام معالجة معقدة أخرى مثل التتبع، وترميز/فك ترميز الفيديو، وعرض الفيديو. تتيح خطوط الأنابيب هذه إجراء تحليلات في الوقت الفعلي على بيانات الفيديو والصور والمستشعرات. يمنحك دعم DeepStream متعدد المنصات طريقة أسرع وأسهل لتطوير تطبيقات وخدمات رؤية الذكاء الاصطناعي محلياً، وعند الحافة، وفي السحابة.
Link to this sectionالمتطلبات الأساسية#
قبل البدء في اتباع هذا الدليل:
- تفضل بزيارة وثائقنا، دليل البدء السريع: NVIDIA Jetson مع Ultralytics YOLO26 لإعداد جهاز NVIDIA Jetson الخاص بك مع Ultralytics YOLO26
- قم بتثبيت DeepStream SDK وفقاً لإصدار JetPack
- بالنسبة لـ JetPack 4.6.4، قم بتثبيت DeepStream 6.0.1
- بالنسبة لـ JetPack 5.1.3، قم بتثبيت DeepStream 6.3
- بالنسبة لـ JetPack 6.1، قم بتثبيت DeepStream 7.1
- بالنسبة لـ JetPack 7.1، قم بتثبيت DeepStream 9.0
في هذا الدليل، استخدمنا طريقة حزم Debian لتثبيت DeepStream SDK على جهاز Jetson. يمكنك أيضاً زيارة DeepStream SDK على Jetson (مؤرشف) للوصول إلى الإصدارات القديمة من DeepStream.
Link to this sectionتهيئة DeepStream لـ YOLO26#
نستخدم هنا مستودع GitHub الخاص بـ marcoslucianops/DeepStream-Yolo والذي يتضمن دعم NVIDIA DeepStream SDK لنماذج YOLO. نقدر جهود marcoslucianops لمساهماته!
-
تثبيت Ultralytics مع التبعيات اللازمة
cd ~ pip install -U pip git clone https://github.com/ultralytics/ultralytics cd ultralytics pip install -e ".[export]" onnxslim -
استنساخ مستودع DeepStream-Yolo
cd ~ git clone https://github.com/marcoslucianops/DeepStream-Yolo -
انسخ ملف
export_yolo26.pyمن دليلDeepStream-Yolo/utilsإلى مجلدultralyticscp ~/DeepStream-Yolo/utils/export_yolo26.py ~/ultralytics cd ultralytics -
قم بتنزيل نموذج الكشف Ultralytics YOLO26 (.pt) الذي تختاره من إصدارات YOLO26. نستخدم هنا yolo26s.pt.
wget https://github.com/ultralytics/assets/releases/download/v8.4.0/yolo26s.pt
يمكنك أيضاً استخدام نموذج YOLO26 مدرب مخصصاً.
-
تحويل النموذج إلى ONNX
python3 export_yolo26.py -w yolo26s.pt
بالنسبة لـ DeepStream 5.1، قم بإزالة وسيط --dynamic واستخدم opset 12 أو أقل. القيمة الافتراضية لـ opset هي 17.
--opset 12لتغيير حجم الاستنتاج (الافتراضي: 640)
-s SIZE
--size SIZE
-s HEIGHT WIDTH
--size HEIGHT WIDTHمثال لـ 1280:
-s 1280
or
-s 1280 1280لتبسيط نموذج ONNX (DeepStream >= 6.0)
--simplifyلاستخدام حجم دفعة (batch-size) ديناميكي (DeepStream >= 6.1)
--dynamicلاستخدام حجم دفعة ثابت (مثال لحجم دفعة = 4)
--batch 4-
انسخ ملف النموذج المُنشأ
.onnxوملفlabels.txtإلى مجلدDeepStream-Yolocp yolo26s.onnx labels.txt ~/DeepStream-Yolo cd ~/DeepStream-Yolo -
اضبط إصدار CUDA وفقاً لإصدار JetPack المثبت
بالنسبة لـ JetPack 4.6.4:
export CUDA_VER=10.2بالنسبة لـ JetPack 5.1.3:
export CUDA_VER=11.4بالنسبة لـ JetPack 6.1:
export CUDA_VER=12.6 -
ترجمة المكتبة
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_Yolo -
قم بتحرير ملف
config_infer_primary_yolo26.txtوفقاً لنموذجك (بالنسبة لـ YOLO26s مع 80 فئة)[property] ... onnx-file=yolo26s.onnx ... num-detected-classes=80 ... parse-bbox-func-name=NvDsInferParseYolo ...
يقوم YOLO26 بتغيير حجم المدخلات مع توسيط الحشوة ويعمل بدون NMS. للحصول على أفضل دقة، أضف ما يلي إلى قسم [property] في ملف config_infer_primary_yolo26.txt:
[property]
...
maintain-aspect-ratio=1
symmetric-padding=1
cluster-mode=4
...-
قم بتحرير ملف
deepstream_app_config... [primary-gie] ... config-file=config_infer_primary_yolo26.txt -
يمكنك أيضاً تغيير مصدر الفيديو في ملف
deepstream_app_config. هنا، يتم تحميل ملف فيديو افتراضي... [source0] ... uri=file:///opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4
Link to this sectionتشغيل الاستنتاج#
deepstream-app -c deepstream_app_config.txtسيستغرق الأمر وقتاً طويلاً لإنشاء ملف محرك TensorRT قبل بدء الاستنتاج. لذا يرجى التحلي بالصبر.

إذا كنت ترغب في تحويل النموذج إلى دقة FP16، قم ببساطة بضبط model-engine-file=model_b1_gpu0_fp16.engine و network-mode=2 داخل config_infer_primary_yolo26.txt
Link to this sectionمعايرة INT8#
إذا كنت ترغب في استخدام دقة INT8 للاستنتاج، فأنت بحاجة إلى اتباع الخطوات أدناه:
حالياً، لا يعمل INT8 مع TensorRT 10.x. تم اختبار هذا القسم من الدليل مع TensorRT 8.x ومن المتوقع أن يعمل.
-
اضبط متغير البيئة
OPENCVexport OPENCV=1 -
ترجمة المكتبة
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_Yolo -
بالنسبة لمجموعة بيانات COCO، قم بتنزيل val2017، واستخرج الملفات، وانقلها إلى مجلد
DeepStream-Yolo -
أنشئ دليلاً جديداً لصور المعايرة
mkdir calibration -
قم بتشغيل ما يلي لاختيار 1000 صورة عشوائية من مجموعة بيانات COCO لتشغيل المعايرة
for jpg in $(ls -1 val2017/*.jpg | sort -R | head -1000); do cp ${jpg} calibration/ done
توصي NVIDIA بـ 500 صورة على الأقل للحصول على دقة جيدة. في هذا المثال، تم اختيار 1000 صورة للحصول على دقة أفضل (المزيد من الصور = دقة أعلى). يمكنك ضبط ذلك من head -1000. على سبيل المثال، لـ 2000 صورة، استخدم head -2000. قد تستغرق هذه العملية وقتاً طويلاً.
-
أنشئ ملف
calibration.txtمع جميع الصور المحددةrealpath calibration/*jpg > calibration.txt -
اضبط متغيرات البيئة
export INT8_CALIB_IMG_PATH=calibration.txt export INT8_CALIB_BATCH_SIZE=1
ستؤدي قيم INT8_CALIB_BATCH_SIZE الأعلى إلى دقة أكبر وسرعة معايرة أسرع. اضبطها وفقاً لذاكرة GPU الخاصة بك.
-
قم بتحديث ملف
config_infer_primary_yolo26.txtمن
... model-engine-file=model_b1_gpu0_fp32.engine #int8-calib-file=calib.table ... network-mode=0 ...إلى
... model-engine-file=model_b1_gpu0_int8.engine int8-calib-file=calib.table ... network-mode=1 ...
Link to this sectionتشغيل استنتاج INT8#
قم بتشغيل نفس الأمر لبناء محرك INT8 وبدء الاستنتاج:
deepstream-app -c deepstream_app_config.txtLink to this sectionإعداد البث المتعدد#
Watch: How to Run Multi-Stream Inference with Ultralytics YOLO26 using NVIDIA DeepStream on Jetson Orin 🚀
لإعداد تدفقات متعددة ضمن تطبيق DeepStream واحد، قم بإجراء التغييرات التالية على ملف deepstream_app_config.txt:
-
قم بتغيير الصفوف والأعمدة لبناء عرض شبكي وفقاً لعدد التدفقات التي تريد الحصول عليها. على سبيل المثال، لـ 4 تدفقات، يمكننا إضافة صفين وعمودين.
[tiled-display] rows=2 columns=2 -
أضف مجموعة
[sourceN]منفصلة لكل بث، مع تحديدuriوnum-sources=1خاص بكل منها.[source0] enable=1 type=3 uri=file:///path/to/video1.mp4 num-sources=1 [source1] enable=1 type=3 uri=file:///path/to/video2.mp4 num-sources=1 [source2] enable=1 type=3 uri=file:///path/to/video3.mp4 num-sources=1 [source3] enable=1 type=3 uri=file:///path/to/video4.mp4 num-sources=1
Link to this sectionتشغيل استنتاج البث المتعدد#
قم بتشغيل نفس الأمر لتشغيل كافة التدفقات في شاشة العرض المبلطة:
deepstream-app -c deepstream_app_config.txt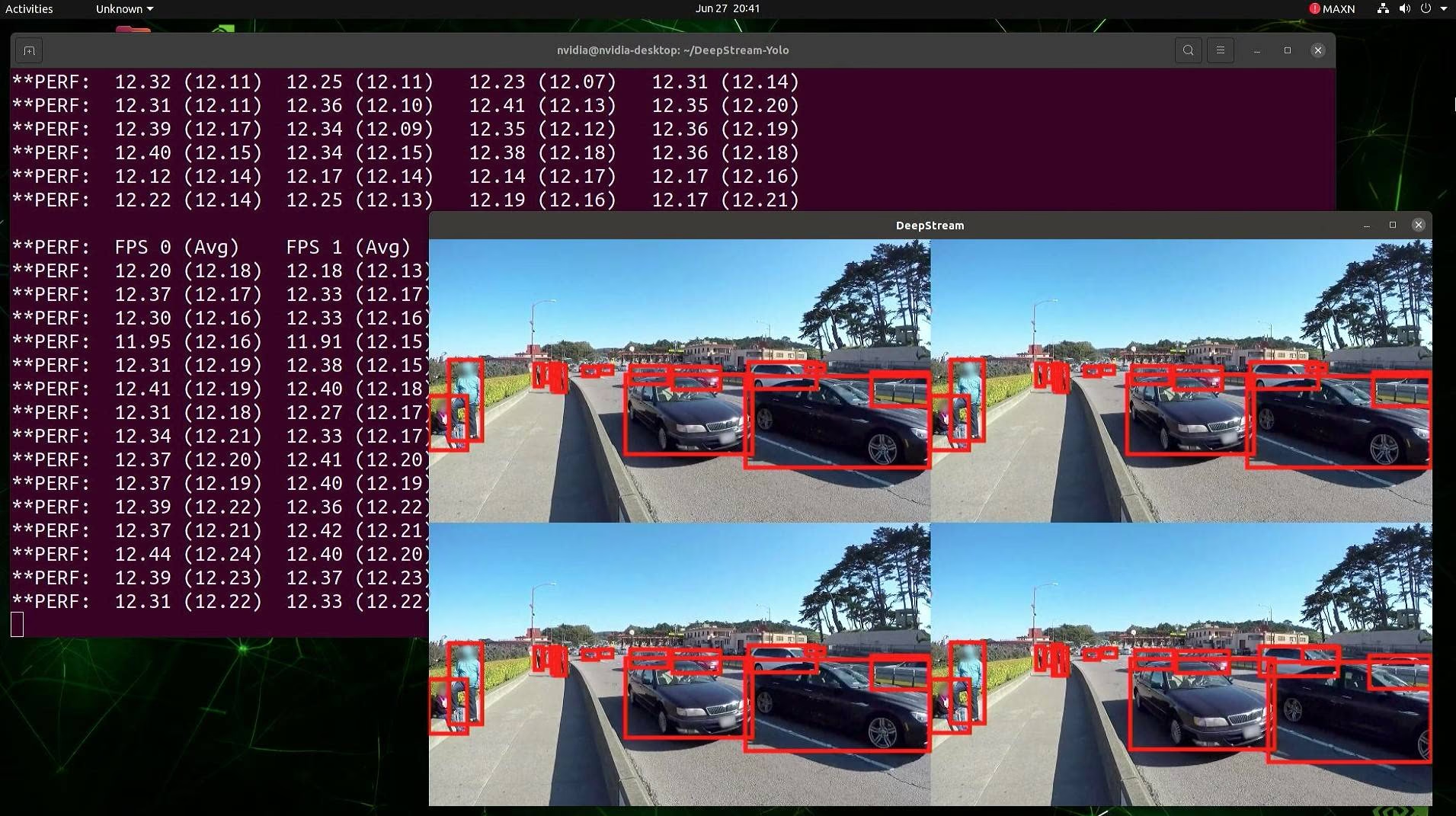
Link to this sectionنتائج القياس المرجعي#
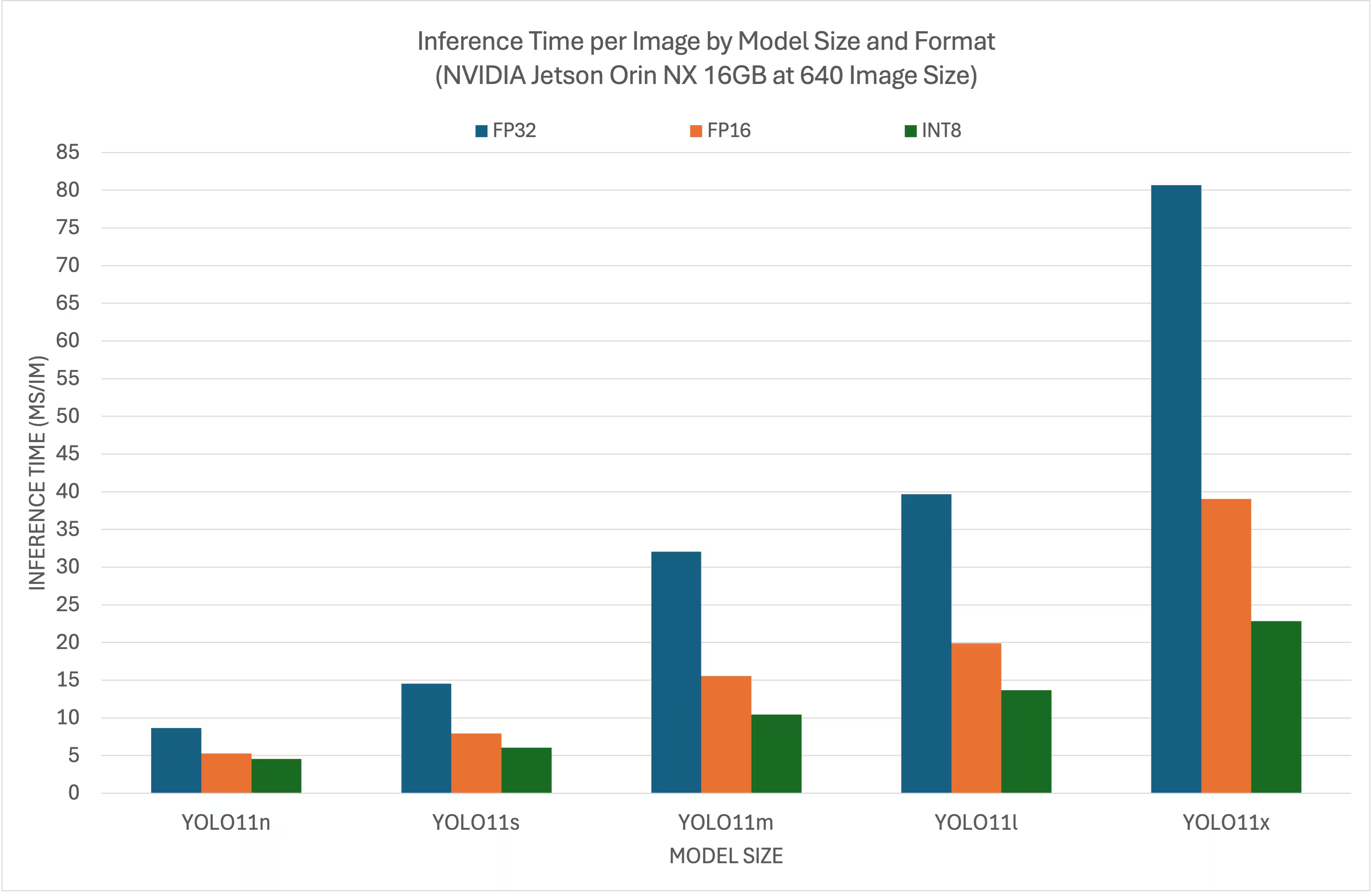
تلخص المقاييس التالية كيفية أداء نماذج YOLO11 عند مستويات دقة TensorRT المختلفة مع حجم مدخلات 640x640 على NVIDIA Jetson Orin NX 16GB. يستخدم YOLO26 نفس سير عمل التصدير والاستنتاج في DeepStream الموصوف أعلاه.
Link to this sectionمخطط المقارنة#
Link to this sectionجدول مقارنة مفصل#
| التنسيق | الحالة | وقت الاستدلال (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 8.64 |
| TensorRT (FP16) | ✅ | 5.27 |
| TensorRT (INT8) | ✅ | 4.54 |
Link to this sectionشكر وتقدير#
تم إنشاء هذا الدليل في البداية بواسطة أصدقائنا في Seeed Studio، Lakshantha و Elaine.
Link to this sectionالأسئلة الشائعة#
Link to this sectionكيف أقوم بإعداد Ultralytics YOLO26 على جهاز NVIDIA Jetson؟#
لإعداد Ultralytics YOLO26 على جهاز NVIDIA Jetson، تحتاج أولاً إلى تثبيت DeepStream SDK المتوافق مع إصدار JetPack الخاص بك. اتبع الدليل خطوة بخطوة في دليل البدء السريع لتهيئة NVIDIA Jetson الخاص بك لنشر YOLO26.
Link to this sectionما هي فائدة استخدام TensorRT مع YOLO26 على NVIDIA Jetson؟#
يؤدي استخدام TensorRT مع YOLO26 إلى تحسين النموذج للاستنتاج، مما يقلل بشكل كبير من التأخير ويحسن الإنتاجية على أجهزة NVIDIA Jetson. يوفر TensorRT استنتاج تعلم عميق عالي الأداء ومنخفض التأخير من خلال دمج الطبقات، ومعايرة الدقة، والضبط التلقائي للنواة. يؤدي هذا إلى تنفيذ أسرع وأكثر كفاءة، وهو مفيد بشكل خاص للتطبيقات في الوقت الفعلي مثل تحليلات الفيديو والآلات المستقلة.
Link to this sectionهل يمكنني تشغيل Ultralytics YOLO26 باستخدام DeepStream SDK عبر أجهزة NVIDIA Jetson المختلفة؟#
نعم، دليل نشر Ultralytics YOLO26 مع DeepStream SDK و TensorRT متوافق عبر مجموعة أجهزة NVIDIA Jetson بالكامل. يتضمن ذلك أجهزة مثل Jetson Orin NX 16GB مع JetPack 5.1.3 و Jetson Nano 4GB مع JetPack 4.6.4. راجع قسم تهيئة DeepStream لـ YOLO26 للحصول على خطوات مفصلة.
Link to this sectionكيف يمكنني تحويل نموذج YOLO26 إلى ONNX لـ DeepStream؟#
لتحويل نموذج YOLO26 إلى تنسيق ONNX للنشر مع DeepStream، استخدم البرنامج النصي utils/export_yolo26.py من مستودع DeepStream-Yolo.
إليك مثال على الأمر:
python3 utils/export_yolo26.py -w yolo26s.pt --opset 12 --simplifyلمزيد من التفاصيل حول تحويل النموذج، تحقق من قسم تصدير النموذج الخاص بنا.
Link to this sectionكيف يمكنني تشغيل استنتاج INT8 باستخدام YOLO26 على DeepStream؟#
لتشغيل استنتاج INT8، قم بمعايرة النموذج على مجموعة صور تمثيلية وقم بتبديل تكوين DeepStream إلى وضع INT8. قم بتنزيل صور COCO val2017، واختر حوالي 1000 صورة للمعايرة، وقم بتعيين متغيرات البيئة INT8_CALIB_IMG_PATH و INT8_CALIB_BATCH_SIZE، ثم قم بتحديث config_infer_primary_yolo26.txt باستخدام model-engine-file=model_b1_gpu0_int8.engine و int8-calib-file=calib.table و network-mode=1. راجع قسم معايرة INT8 للحصول على الخطوات الكاملة. تتطلب INT8 حالياً إصدار TensorRT 8.x.
Link to this sectionكيف يمكنني تشغيل عدة تدفقات كاميرا مع DeepStream على Jetson؟#
لمعالجة تدفقات متعددة في تطبيق DeepStream واحد، قم بتحرير ملف deepstream_app_config.txt لإضافة شبكة عرض مبلطة وإدراج كل مصدر URI. قم بتعيين rows و columns تحت [tiled-display] لبناء الشبكة، وأضف مجموعة [sourceN] منفصلة لكل تدفق مع تحديد uri و num-sources=1 خاص به، واضبط الشبكة لتناسب عدد التدفقات. راجع قسم إعداد البث المتعدد للحصول على مثال كامل.
Link to this sectionما هي مقاييس الأداء لـ YOLO على NVIDIA Jetson Orin NX؟#
يختلف أداء نماذج YOLO11 على NVIDIA Jetson Orin NX 16GB بناءً على مستويات دقة TensorRT. على سبيل المثال، تحقق نماذج YOLO11s ما يلي:
- دقة FP32: 14.53 مللي ثانية/صورة، 68.8 إطار في الثانية
- دقة FP16: 7.91 مللي ثانية/صورة، 126 إطار في الثانية
- دقة INT8: 6.05 مللي ثانية/صورة، 165 إطار في الثانية
تؤكد هذه المقاييس كفاءة وقدرة استخدام نماذج YOLO11 المحسنة بواسطة TensorRT على أجهزة NVIDIA Jetson. لمزيد من التفاصيل، راجع قسم نتائج القياس الخاص بنا.