Link to this sectionクイックスタートガイド:Raspberry PiとUltralytics YOLO26#
Raspberry Pi is a small, affordable computer that runs Ultralytics YOLO26 for real-time object detection at the edge — no GPU required. This guide walks you through deploying YOLO26 on Raspberry Pi 4 and 5: flashing the OS, installing Ultralytics, exporting to NCNN for the fastest inference on ARM, and running predictions on a live camera feed. It also includes performance benchmarks across ten export formats so you can pick the best speed and accuracy trade-off for your hardware.
Ultralyticsのセットアップ、NCNNへのエクスポートと推論の実行、ベンチマーク、またはカメラによる推論へ移動してください。
Watch: Raspberry Pi 5 updates and improvements.
本ガイドは、最新のRaspberry Pi OS Bookworm (Debian 12)を実行するRaspberry Pi 4およびRaspberry Pi 5でテストされています。Raspberry Pi 3のような古いRaspberry Piデバイスでこのガイドを使用する場合も、同じRaspberry Pi OS Bookwormがインストールされていれば動作するはずです。
Link to this sectionRaspberry Piとは?#
Raspberry Piは、小型で手頃な価格のシングルボードコンピュータです。ホビーユーザーによるホームオートメーションから産業用途まで、幅広いプロジェクトやアプリケーションで人気を博しています。Raspberry Piボードは様々なオペレーティングシステムを実行でき、センサーやアクチュエータ、その他のハードウェアコンポーネントと容易に統合できるGPIO(General Purpose Input/Output)ピンを備えています。モデルによって仕様は異なりますが、いずれも低コスト、コンパクト、多用途という基本的な設計思想を共有しています。
Link to this sectionRaspberry Piシリーズの比較#
| Raspberry Pi 3 | Raspberry Pi 4 | Raspberry Pi 5 | |
|---|---|---|---|
| CPU | Broadcom BCM2837, Cortex-A53 64Bit SoC | Broadcom BCM2711, Cortex-A72 64Bit SoC | Broadcom BCM2712, Cortex-A76 64Bit SoC |
| CPU最大周波数 | 1.4GHz | 1.8GHz | 2.4GHz |
| GPU | Videocore IV | Videocore VI | VideoCore VII |
| GPU最大周波数 | 400Mhz | 500Mhz | 800Mhz |
| メモリ | 1GB LPDDR2 SDRAM | 1GB, 2GB, 4GB, 8GB LPDDR4-3200 SDRAM | 4GB, 8GB LPDDR4X-4267 SDRAM |
| PCIe | N/A | N/A | 1xPCIe 2.0 インターフェース |
| 最大消費電力 | 2.5A@5V | 3A@5V | 5A@5V (PD有効時) |
Link to this sectionRaspberry Pi OSとは?#
Raspberry Pi OS(以前はRaspbianとして知られていました)は、Raspberry Pi Foundationが配布するコンパクトなシングルボードコンピュータのRaspberry Piファミリー向けの、Debian GNU/Linuxディストリビューションに基づくUnix系オペレーティングシステムです。Raspberry Pi OSは、ARM CPUを搭載したRaspberry Pi向けに高度に最適化されており、Openboxスタッキングウィンドウマネージャを備えた修正版のLXDEデスクトップ環境を使用しています。Raspberry Pi OSは活発に開発されており、Raspberry Pi上で可能な限り多くのDebianパッケージの安定性とパフォーマンスを向上させることに重点を置いています。
Link to this sectionRaspberry Pi OSをRaspberry Piに書き込む#
Raspberry Piを入手した後に最初に行うことは、micro-SDカードにRaspberry Pi OSを書き込み、デバイスに挿入してOSを起動することです。初回使用のためにデバイスを準備するには、Raspberry Piのスタートガイドドキュメントの詳細な手順に従ってください。
Link to this sectionUltralyticsのセットアップ#
次回のコンピュータビジョンプロジェクトのために、Raspberry PiでUltralyticsパッケージをセットアップするには2つの方法があります。
Link to this sectionDockerで始める#
Raspberry PiでUltralytics YOLO26を最速で始める方法は、Raspberry Pi用のビルド済みDockerイメージを実行することです。
以下のコマンドを実行してDockerコンテナをプルし、Raspberry Pi上で実行します。これは、Python3環境でUbuntu 24.04を実行するarm64v8/ubuntu Dockerイメージに基づいています。
t=ultralytics/ultralytics:latest-arm64
sudo docker pull $t && sudo docker run -it --ipc=host $tDockerイメージには既にUltralyticsが含まれているため、すぐにモデルをNCNNにエクスポートする作業に進めます。
Link to this sectionDockerなしで始める#
Link to this sectionUltralyticsパッケージをインストールする#
ここでは、PyTorchモデルを他のフォーマットにエクスポートできるように、オプションの依存関係を含めてRaspberry PiにUltralyticsパッケージをインストールします。
-
パッケージリストを更新し、pipをインストールして最新版にアップグレードする
sudo apt update sudo apt install python3-pip -y pip install -U pip -
オプションの依存関係を含む
ultralyticspipパッケージをインストールするpip install ultralytics[export] -
デバイスを再起動する
sudo reboot
Link to this sectionNCNNをRaspberry Piで使用する#
Ultralyticsがサポートするすべてのモデルエクスポートフォーマットの中で、NCNNはARMアーキテクチャのようなモバイル/組み込みプラットフォーム向けに高度に最適化されているため、Raspberry Piデバイス上で最高の推論パフォーマンスを発揮します。YOLO26n PyTorchモデルをNCNNに変換し、エクスポートされたモデルで推論を実行します。
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo26n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo26n_ncnn_model")
# Run inference
results = ncnn_model("https://ultralytics.com/images/bus.jpg")サポートされているエクスポートオプションの詳細については、モデルデプロイメントオプションガイドを参照してください。
Link to this sectionYOLO11に対するYOLO26のパフォーマンス向上#
YOLO26は、Raspberry Pi 5のようなハードウェア制約のあるデバイスで実行するために特別に設計されています。YOLO11nと比較して、YOLO26nはRaspberry Pi 5上のONNXエクスポートモデルで640の入力サイズにおいて、FPSが約15%向上(6.79 → 7.79)し、さらに高いmAP(39.5に対し40.1)を実現しています。以下の表とチャートがこの比較を示しています。
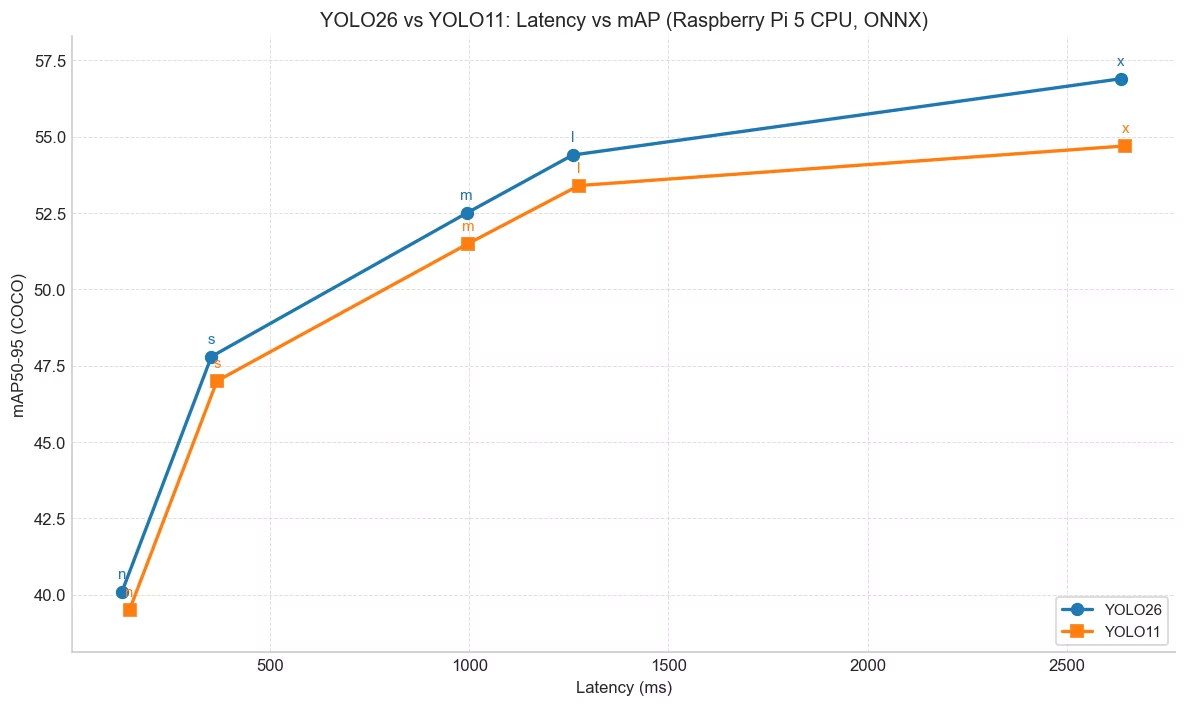
| モデル | mAP50-95(B) | 推論時間 (ms/im) |
|---|---|---|
| YOLO26n | 40.1 | 128.42 |
| YOLO26s | 47.8 | 352.84 |
| YOLO26m | 52.5 | 993.78 |
| YOLO26l | 54.4 | 1259.46 |
| YOLO26x | 56.9 | 2636.26 |
Ultralytics 8.4.14でベンチマーク済み。
Link to this sectionRaspberry Pi 5 YOLO26ベンチマーク#
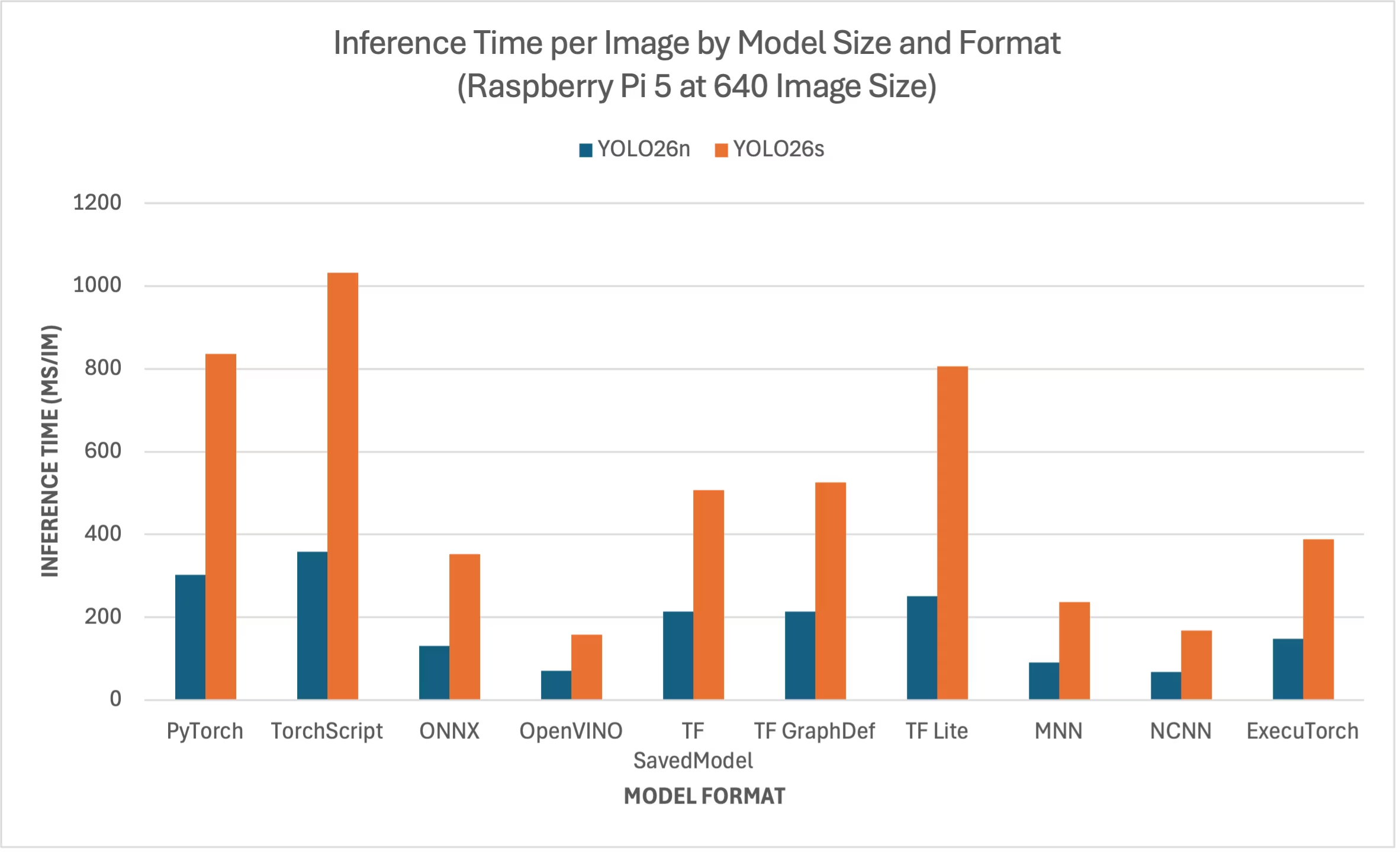
YOLO26のベンチマークは、速度と精度を測定するために、Ultralyticsチームによって10種類のモデルフォーマット(PyTorch、TorchScript、ONNX、OpenVINO、TF SavedModel、TF GraphDef、TF Lite、MNN、NCNN、ExecuTorch)で実施されました。ベンチマークは、Raspberry Pi 5にてFP32精度、デフォルトの入力画像サイズ640で実行されました。
Link to this section比較チャート#
YOLO26nおよびYOLO26sモデルのベンチマークのみを含めています。他のモデルサイズはRaspberry Piで実行するには大きすぎ、適切なパフォーマンスが得られないためです。
Link to this section詳細比較表#
以下の表は、Raspberry Pi 5上で実行した10種類のフォーマット(PyTorch, TorchScript, ONNX, OpenVINO, TF SavedModel, TF GraphDef, TF Lite, MNN, NCNN, ExecuTorch)における2つの異なるモデル(YOLO26n, YOLO26s)のベンチマーク結果であり、各組み合わせのステータス、サイズ、mAP50-95(B)メトリック、推論時間を示しています。
| 形式 | ステータス | ディスクサイズ (MB) | mAP50-95(B) | 推論時間 (ms/im) |
|---|---|---|---|---|
| PyTorch | ✅ | 5.3 | 0.4798 | 302.15 |
| TorchScript | ✅ | 9.8 | 0.4764 | 357.58 |
| ONNX | ✅ | 9.5 | 0.4764 | 130.33 |
| OpenVINO | ✅ | 9.6 | 0.4818 | 70.74 |
| TF SavedModel | ✅ | 24.6 | 0.4764 | 213.58 |
| TF GraphDef | ✅ | 9.5 | 0.4764 | 213.5 |
| TF Lite | ✅ | 9.9 | 0.4764 | 251.41 |
| MNN | ✅ | 9.4 | 0.4784 | 90.89 |
| NCNN | ✅ | 9.4 | 0.4805 | 67.69 |
| ExecuTorch | ✅ | 9.4 | 0.4764 | 148.36 |
Ultralytics 8.4.1でベンチマーク済み
推論時間には、前処理および後処理は含まれていません。
Link to this section結果の再現#
上記のUltralyticsベンチマークをすべてのエクスポートフォーマットで再現するには、このコードを実行してください:
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Benchmark YOLO26n speed and accuracy on the COCO128 dataset for all export formats
results = model.benchmark(data="coco128.yaml", imgsz=640)ベンチマーク結果は、システムの正確なハードウェアやソフトウェア構成、および実行時のシステム負荷に応じて異なる可能性があることに注意してください。より信頼性の高い結果を得るには、data='coco.yaml'(5000枚の検証画像)のような画像数の多いデータセットを使用してください。
Link to this sectionRaspberry Piカメラを使用する#
Raspberry PiをComputer Visionプロジェクトで使用する場合、推論を実行するためにリアルタイムのビデオフィードを取得することが不可欠な場合があります。Raspberry PiのオンボードMIPI CSIコネクタを使用すると、公式のRaspberry Piカメラモジュールを接続できます。このガイドでは、Raspberry Pi Camera Module 3を使用してビデオフィードを取得し、YOLO26モデルを使用して推論を実行しました。
Raspberry Piが提供するさまざまなカメラモジュールや、Raspberry Piカメラモジュールの使い始め方について詳しく学びましょう。
Raspberry Pi 5はRaspberry Pi 4よりも小さなCSIコネクタ(15ピン対22ピン)を使用しているため、Raspberry Piカメラに接続するには15ピン-22ピンアダプターケーブルが必要です。
Link to this sectionカメラをテストする#
カメラをRaspberry Piに接続した後、次のコマンドを実行します。カメラからのライブビデオフィードが約5秒間表示されるはずです。
rpicam-hello公式Raspberry Piドキュメントでのrpicam-helloの使用について詳しく学びましょう。
Link to this sectionカメラによる推論#
Raspberry Piカメラを使用してYOLO26モデルで推論を実行するには2つの方法があります。
Raspberry Pi OSにプリインストールされている picamera2 を使用して、カメラにアクセスし、YOLO26モデルの推論を実行できます。
import cv2
from picamera2 import Picamera2
from ultralytics import YOLO
# Initialize the Picamera2
picam2 = Picamera2()
picam2.preview_configuration.main.size = (1280, 720)
picam2.preview_configuration.main.format = "RGB888"
picam2.preview_configuration.align()
picam2.configure("preview")
picam2.start()
# Load the YOLO26 model
model = YOLO("yolo26n.pt")
while True:
# Capture frame-by-frame
frame = picam2.capture_array()
# Run YOLO26 inference on the frame
results = model(frame)
# Visualize the results on the frame
annotated_frame = results[0].plot()
# Display the resulting frame
cv2.imshow("Camera", annotated_frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) == ord("q"):
break
# Release resources and close windows
cv2.destroyAllWindows()画像やビデオの入力タイプを変更したい場合は、推論ソースに関するドキュメントを確認してください。
Link to this sectionRaspberry Pi使用時のベストプラクティス#
YOLO26を実行するRaspberry Piで最大限のパフォーマンスを実現するために、いくつかのベストプラクティスに従う必要があります。
-
SSDの使用
Raspberry Piを24時間365日連続稼働させる場合は、システムにSSDを使用することをお勧めします。SDカードは連続的な書き込みに耐えられず、破損する可能性があるためです。Raspberry Pi 5のオンボードPCIeコネクタを使用すれば、NVMe Base for Raspberry Pi 5 などのアダプターを使用してSSDを接続できます。
-
GUIなしでのインストール
Raspberry Pi OSをフラッシュする際、デスクトップ環境をインストールしない(Raspberry Pi OS Lite)ことを選択できます。これによりデバイスのRAMを節約でき、コンピュータービジョンの処理に利用できるリソースが増えます。
-
Raspberry Piのオーバークロック
Raspberry Pi 5でUltralytics YOLO26モデルを実行する際にパフォーマンスを少し向上させたい場合は、CPUをベースの2.4GHzから2.9GHzに、GPUを800MHzから1GHzにオーバークロックできます。システムが不安定になったりクラッシュしたりする場合は、オーバークロック値を100MHzずつ下げてください。オーバークロックは発熱を増加させ、サーマルスロットリングを引き起こす可能性があるため、適切な冷却対策を行ってください。
a. ソフトウェアをアップグレードする
sudo apt update && sudo apt dist-upgradeb. 設定ファイルを開いて編集する
sudo nano /boot/firmware/config.txtc. 以下の行を末尾に追加する
arm_freq=3000 gpu_freq=1000 force_turbo=1d. CTRL + X を押して Y を押し、ENTER を押して保存して終了する
e. Raspberry Piを再起動する
Link to this section次のステップ#
Raspberry PiへのYOLO26のセットアップが完了しました。さらに進むには、推論オプションについては予測モードを、追加のデプロイフォーマットについてはエクスポートモードを、エッジでのさらなる計算能力が必要な場合はNVIDIA Jetsonガイドを探索してください。完全なドキュメントについては、Ultralytics YOLO26ドキュメントにアクセスしてください。
Link to this section謝辞および引用#
本ガイドは、絶滅危惧種の保護を目的としたYOLOの活用に取り組む組織、Kashmir World FoundationのDaan Eeltink氏によって作成されました。オブジェクト検出技術の分野における彼らの先駆的な取り組みと教育的な焦点に対して敬意を表します。
Kashmir World Foundationの活動に関する詳細は、彼らの ウェブサイト をご覧ください。
Link to this sectionよくある質問 (FAQ)#
Link to this sectionDockerを使用せずにRaspberry PiでUltralytics YOLO26をセットアップするにはどうすればよいですか?#
Dockerを使用せずにRaspberry PiでUltralytics YOLO26をセットアップするには、以下の手順に従ってください。
- パッケージリストを更新し、
pipをインストールします:sudo apt update sudo apt install python3-pip -y pip install -U pip - オプションの依存関係を含めてUltralyticsパッケージをインストールします:
pip install ultralytics[export] - デバイスを再起動して変更を適用します:
sudo reboot
詳細な手順については、Dockerなしで開始 セクションを参照してください。
Link to this sectionAIタスクのためにRaspberry PiでUltralytics YOLO26のNCNNフォーマットを使用すべき理由は何ですか?#
Ultralytics YOLO26のNCNNフォーマットは、モバイルおよび組み込みプラットフォーム向けに高度に最適化されており、Raspberry PiデバイスでAIタスクを実行するのに理想的です。NCNNはARMアーキテクチャを活用することで推論パフォーマンスを最大化し、他のフォーマットと比較してより高速で効率的な処理を提供します。サポートされているエクスポートフォーマットの詳細については、モデルエクスポートオプションを参照してください。
Link to this sectionRaspberry Piで使用するためにYOLO26モデルをNCNNフォーマットに変換するにはどうすればよいですか?#
PyTorchのYOLO26モデルをNCNNフォーマットに変換するには、PythonまたはCLIコマンドを使用します:
from ultralytics import YOLO
# Load a YOLO26n PyTorch model
model = YOLO("yolo26n.pt")
# Export the model to NCNN format
model.export(format="ncnn") # creates 'yolo26n_ncnn_model'
# Load the exported NCNN model
ncnn_model = YOLO("yolo26n_ncnn_model")
# Run inference
results = ncnn_model("https://ultralytics.com/images/bus.jpg")詳細については、Raspberry PiでNCNNを使用する セクションを参照してください。
Link to this sectionYOLO26を実行する際に関連するRaspberry Pi 4とRaspberry Pi 5のハードウェアの違いは何ですか?#
主な違いは以下の通りです:
- CPU: Raspberry Pi 4はBroadcom BCM2711(Cortex-A72 64-bit SoC)を使用し、Raspberry Pi 5はBroadcom BCM2712(Cortex-A76 64-bit SoC)を使用しています。
- 最大CPU周波数: Raspberry Pi 4の最大周波数は1.8GHzですが、Raspberry Pi 5は2.4GHzに達します。
- メモリ: Raspberry Pi 4は最大8GBのLPDDR4-3200 SDRAMを提供し、Raspberry Pi 5はLPDDR4X-4267 SDRAM(4GBおよび8GBバリアント)を備えています。
これらの強化により、Raspberry Pi 4と比較してRaspberry Pi 5ではYOLO26モデルのパフォーマンスベンチマークが向上しています。詳細は Raspberry Piシリーズ比較 テーブルを参照してください。
Link to this sectionRaspberry PiカメラモジュールをUltralytics YOLO26で使用するにはどうすればよいですか?#
YOLO26の推論にRaspberry Piカメラをセットアップする方法は2つあります:
-
picamera2を使用する方法:import cv2 from picamera2 import Picamera2 from ultralytics import YOLO picam2 = Picamera2() picam2.preview_configuration.main.size = (1280, 720) picam2.preview_configuration.main.format = "RGB888" picam2.preview_configuration.align() picam2.configure("preview") picam2.start() model = YOLO("yolo26n.pt") while True: frame = picam2.capture_array() results = model(frame) annotated_frame = results[0].plot() cv2.imshow("Camera", annotated_frame) if cv2.waitKey(1) == ord("q"): break cv2.destroyAllWindows() -
TCPストリームを使用する方法:
rpicam-vid -n -t 0 --inline --listen -o tcp://127.0.0.1:8888from ultralytics import YOLO model = YOLO("yolo26n.pt") results = model("tcp://127.0.0.1:8888")
詳細なセットアップ手順については、カメラを使用した推論 セクションを参照してください。