Link to this sectionUltralytics YOLO11#
Link to this sectionVisão geral#
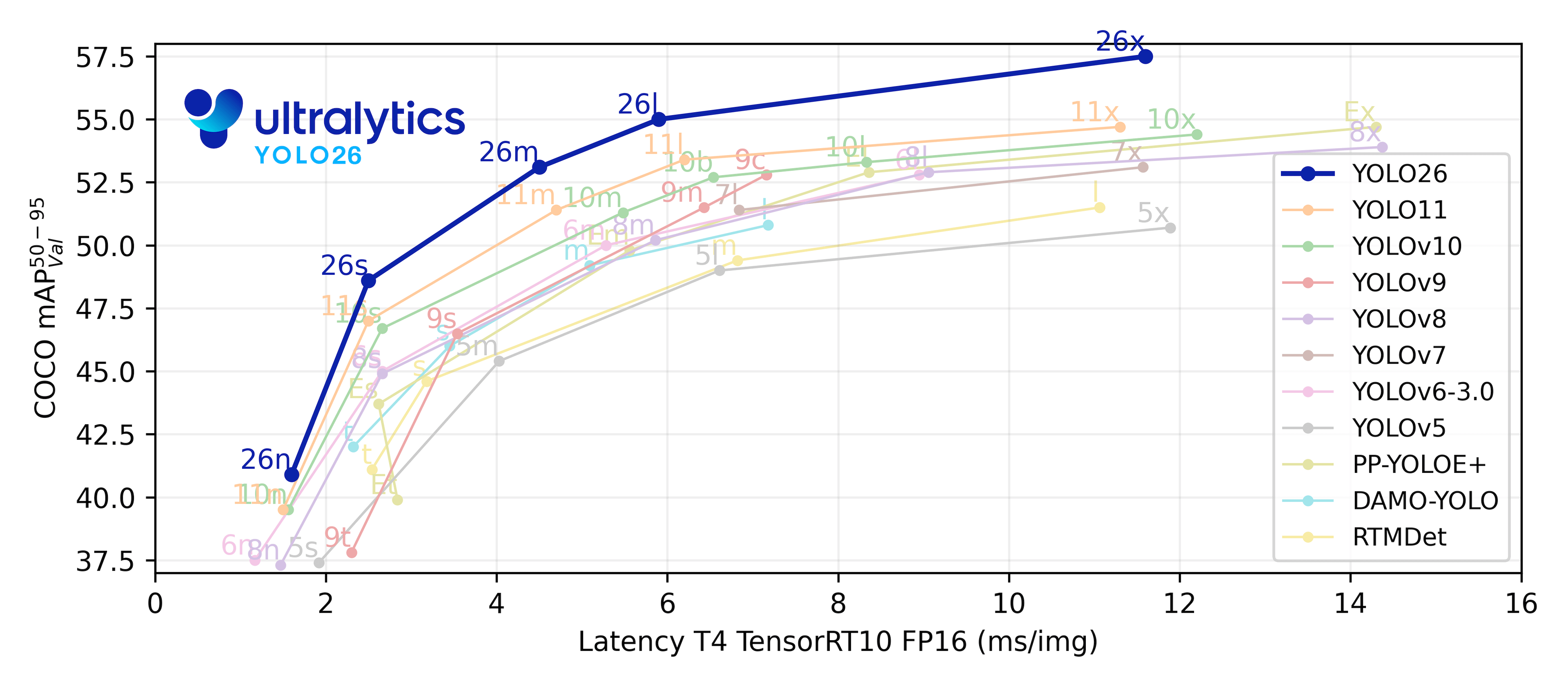
O YOLO11 foi lançado pela Ultralytics em 10 de setembro de 2024, oferecendo excelente precisão, velocidade e eficiência. Baseando-se nos avanços impressionantes das versões anteriores do YOLO, o YOLO11 introduz melhorias significativas na arquitetura e nos métodos de treinamento, tornando-o uma escolha versátil para uma ampla gama de tarefas de visão computacional. Para o modelo mais recente da Ultralytics com inferência end-to-end sem NMS e implantação otimizada na borda, consulte YOLO26.
Ultralytics YOLO11 🚀 Podcast generated by NotebookLM
Watch: How to Use Ultralytics YOLO11 for Object Detection and Tracking | How to Benchmark | YOLO11 RELEASED🚀
Explore e execute modelos YOLO11 diretamente na Ultralytics Platform.
Link to this sectionPrincipais recursos#
- Extração de Características Aprimorada: O YOLO11 utiliza uma arquitetura de backbone e pescoço melhorada, que aprimora as capacidades de extração de características para uma detecção de objetos mais precisa e desempenho em tarefas complexas.
- Otimizado para Eficiência e Velocidade: O YOLO11 introduz designs arquitetônicos refinados e pipelines de treinamento otimizados, proporcionando velocidades de processamento mais rápidas e mantendo um equilíbrio ideal entre precisão e desempenho.
- Maior Precisão com Menos Parâmetros: Com avanços no design do modelo, o YOLO11m alcança uma mean Average Precision (mAP) superior no conjunto de dados COCO enquanto utiliza 22% menos parâmetros que o YOLOv8m, tornando-o computacionalmente eficiente sem comprometer a precisão.
- Adaptabilidade entre Ambientes: O YOLO11 pode ser implantado perfeitamente em vários ambientes, incluindo dispositivos de borda, plataformas de nuvem e sistemas que suportam GPUs NVIDIA, garantindo flexibilidade máxima.
- Ampla Gama de Tarefas Suportadas: Seja detecção de objetos, segmentação de instâncias, classificação de imagens, estimativa de pose ou detecção de objetos orientados (OBB), o YOLO11 foi projetado para atender a um conjunto diversificado de desafios de visão computacional.
Link to this sectionTarefas e modos suportados#
O YOLO11 baseia-se na gama versátil de modelos estabelecida pelos lançamentos anteriores do Ultralytics YOLO, oferecendo suporte aprimorado em várias tarefas de visão computacional:
| Modelo | Nomes de arquivo | Tarefa | Inferência | Validação | Treinamento | Exportar |
|---|---|---|---|---|---|---|
| YOLO11 | yolo11n.pt yolo11s.pt yolo11m.pt yolo11l.pt yolo11x.pt | Detecção | ✅ | ✅ | ✅ | ✅ |
| YOLO11-seg | yolo11n-seg.pt yolo11s-seg.pt yolo11m-seg.pt yolo11l-seg.pt yolo11x-seg.pt | Segmentação de instâncias | ✅ | ✅ | ✅ | ✅ |
| YOLO11-pose | yolo11n-pose.pt yolo11s-pose.pt yolo11m-pose.pt yolo11l-pose.pt yolo11x-pose.pt | Pose/Pontos-chave | ✅ | ✅ | ✅ | ✅ |
| YOLO11-obb | yolo11n-obb.pt yolo11s-obb.pt yolo11m-obb.pt yolo11l-obb.pt yolo11x-obb.pt | Detecção orientada | ✅ | ✅ | ✅ | ✅ |
| YOLO11-cls | yolo11n-cls.pt yolo11s-cls.pt yolo11m-cls.pt yolo11l-cls.pt yolo11x-cls.pt | Classificação | ✅ | ✅ | ✅ | ✅ |
Esta tabela fornece uma visão geral das variantes do modelo YOLO11, destacando sua aplicabilidade em tarefas específicas e compatibilidade com modos operacionais como Inferência, Validação, Treinamento e Exportação. Essa flexibilidade torna o YOLO11 adequado para uma ampla gama de aplicações em visão computacional, desde detecção em tempo real até tarefas complexas de segmentação.
Link to this sectionMétricas de desempenho#
Consulta a Documentação de detecção para ver exemplos de uso com esses modelos treinados no COCO, que incluem 80 classes pré-treinadas.
| Modelo | tamanho (pixels) | mAPval 50-95 | Velocidade CPU ONNX (ms) | Velocidade T4 TensorRT10 (ms) | params (M) | FLOPs (B) |
|---|---|---|---|---|---|---|
| YOLO11n | 640 | 39.5 | 56.1 ± 0.8 | 1.5 ± 0.0 | 2.6 | 6.5 |
| YOLO11s | 640 | 47.0 | 90.0 ± 1.2 | 2,5 ± 0,0 | 9.4 | 21.5 |
| YOLO11m | 640 | 51.5 | 183.2 ± 2.0 | 4,7 ± 0,1 | 20.1 | 68.0 |
| YOLO11l | 640 | 53.4 | 238.6 ± 1.4 | 6.2 ± 0.1 | 25.3 | 86.9 |
| YOLO11x | 640 | 54.7 | 462.8 ± 6.7 | 11.3 ± 0.2 | 56,9 | 194.9 |
Link to this sectionExemplos de uso#
Esta seção fornece exemplos simples de treinamento e inferência do YOLO11. Para documentação completa sobre estes e outros modos, consulte as páginas de documentação de Predict, Train, Val e Export.
Observe que o exemplo abaixo é para modelos YOLO11 Detect para detecção de objetos. Para tarefas adicionais suportadas, veja a documentação de Segment, Classify, OBB e Pose.
Modelos pré-treinados PyTorch *.pt, bem como arquivos de configuração *.yaml, podem ser passados para a classe YOLO() para criar uma instância de modelo em Python:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLO11n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")Link to this sectionCitações e Agradecimentos#
O Ultralytics não publicou um artigo de pesquisa formal para o YOLO11 devido à natureza em rápida evolução dos modelos. Nós nos concentramos em avançar a tecnologia e torná-la mais fácil de usar, em vez de produzir documentação estática. Para as informações mais atualizadas sobre a arquitetura, recursos e uso do YOLO, consulte nosso repositório no GitHub e nossa documentação.
Se você usar o YOLO11 ou qualquer outro software deste repositório em seu trabalho, por favor, cite-o usando o seguinte formato:
@software{yolo11_ultralytics,
author = {Glenn Jocher and Jing Qiu},
title = {Ultralytics YOLO11},
version = {11.0.0},
year = {2024},
url = {https://github.com/ultralytics/ultralytics},
orcid = {0000-0001-5950-6979, 0000-0003-3783-7069},
license = {AGPL-3.0}
}Observe que o DOI está pendente e será adicionado à citação assim que estiver disponível. Os modelos YOLO11 são fornecidos sob licenças AGPL-3.0 e Enterprise.
Link to this sectionFAQ#
Link to this sectionQuais são as principais melhorias no Ultralytics YOLO11 em comparação com o YOLOv8?#
O Ultralytics YOLO11 introduz vários avanços significativos em relação ao YOLOv8. As principais melhorias incluem:
- Extração de características aprimorada: O YOLO11 emprega uma arquitetura de backbone e neck melhorada, aumentando as capacidades de extração de características para uma detecção de objetos mais precisa.
- Eficiência e velocidade otimizadas: Projetos de arquitetura refinados e pipelines de treinamento otimizados proporcionam velocidades de processamento mais rápidas, mantendo um equilíbrio entre precisão e desempenho.
- Maior precisão com menos parâmetros: O YOLO11m alcança uma média de Precisão (mAP) maior no conjunto de dados COCO com 22% menos parâmetros do que o YOLOv8m, tornando-o computacionalmente eficiente sem comprometer a precisão.
- Adaptabilidade entre ambientes: O YOLO11 pode ser implantado em vários ambientes, incluindo dispositivos de borda (edge devices), plataformas em nuvem e sistemas que suportam GPUs NVIDIA.
- Ampla gama de tarefas suportadas: O YOLO11 suporta diversas tarefas de visão computacional, como detecção de objetos, segmentação de instâncias, classificação de imagens, estimativa de pose e detecção de objetos orientados (OBB).
Link to this sectionComo treino um modelo YOLO11 para detecção de objetos?#
O treinamento de um modelo YOLO11 para detecção de objetos pode ser feito usando Python ou comandos da CLI. Abaixo estão exemplos para ambos os métodos:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)Para instruções mais detalhadas, consulte a documentação de Train.
Link to this sectionQuais tarefas os modelos YOLO11 podem realizar?#
Os modelos YOLO11 são versáteis e suportam uma ampla gama de tarefas de visão computacional, incluindo:
- Detecção de Objetos: Identificar e localizar objetos dentro de uma imagem.
- Segmentação de Instâncias: Detectar objetos e delimitar suas fronteiras.
- Classificação de Imagem: Categorizar imagens em classes predefinidas.
- Estimativa de Pose: Detectar e rastrear pontos-chave em corpos humanos.
- Detecção de Objetos Orientados (OBB): Detectar objetos com rotação para maior precisão.
Para mais informações sobre cada tarefa, consulte a documentação de Detecção, Segmentação de Instâncias, Classificação, Estimativa de Pose e Detecção Orientada.
Link to this sectionComo o YOLO11 alcança maior precisão com menos parâmetros?#
O YOLO11 alcança maior precisão com menos parâmetros através de avanços no design do modelo e técnicas de otimização. A arquitetura melhorada permite uma extração e processamento eficientes de características, resultando em uma média de precisão (mAP) maior em conjuntos de dados como o COCO, utilizando 22% menos parâmetros do que o YOLOv8m. Isso torna o YOLO11 computacionalmente eficiente sem comprometer a precisão, tornando-o adequado para implantação em dispositivos com recursos limitados.
Link to this sectionO YOLO11 pode ser implantado em dispositivos de borda?#
Sim, o YOLO11 foi projetado para adaptabilidade em vários ambientes, incluindo dispositivos de borda. Sua arquitetura otimizada e capacidades de processamento eficiente o tornam adequado para implantação em dispositivos de borda, plataformas em nuvem e sistemas que suportam GPUs NVIDIA. Essa flexibilidade garante que o YOLO11 possa ser usado em diversas aplicações, desde detecção em tempo real em dispositivos móveis até tarefas complexas de segmentação em ambientes de nuvem. Para mais detalhes sobre as opções de implantação, consulte a documentação de Export.