Link to this sectionUltralytics YOLO26 auf NVIDIA Jetson mit dem DeepStream SDK und TensorRT#
Watch: How to use Ultralytics YOLO26 models with NVIDIA Deepstream on Jetson Orin NX 🚀
Dieser umfassende Leitfaden bietet eine detaillierte Anleitung für die Bereitstellung von Ultralytics YOLO26 auf NVIDIA Jetson-Geräten unter Verwendung des DeepStream SDK und TensorRT. Hier verwenden wir TensorRT, um die Inferenzleistung auf der Jetson-Plattform zu maximieren.
Dieser Leitfaden führt dich durch die DeepStream-Konfiguration für YOLO26, die INT8-Kalibrierung, das Multi-Stream-Setup und die Benchmark-Ergebnisse.
Dieser Leitfaden wurde mit dem NVIDIA Jetson Orin Nano Super Developer Kit getestet, das mit dem neuesten stabilen JetPack-Release JP6.1 läuft, dem Seeed Studio reComputer J4012, das auf dem NVIDIA Jetson Orin NX 16GB basiert und mit dem JetPack-Release JP5.1.3 läuft, sowie dem Seeed Studio reComputer J1020 v2, das auf dem NVIDIA Jetson Nano 4GB basiert und mit dem JetPack-Release JP4.6.4 läuft. Es wird erwartet, dass er auf der gesamten NVIDIA Jetson-Hardware-Reihe funktioniert, einschließlich aktueller und älterer Modelle.
Link to this sectionWas ist NVIDIA DeepStream?#
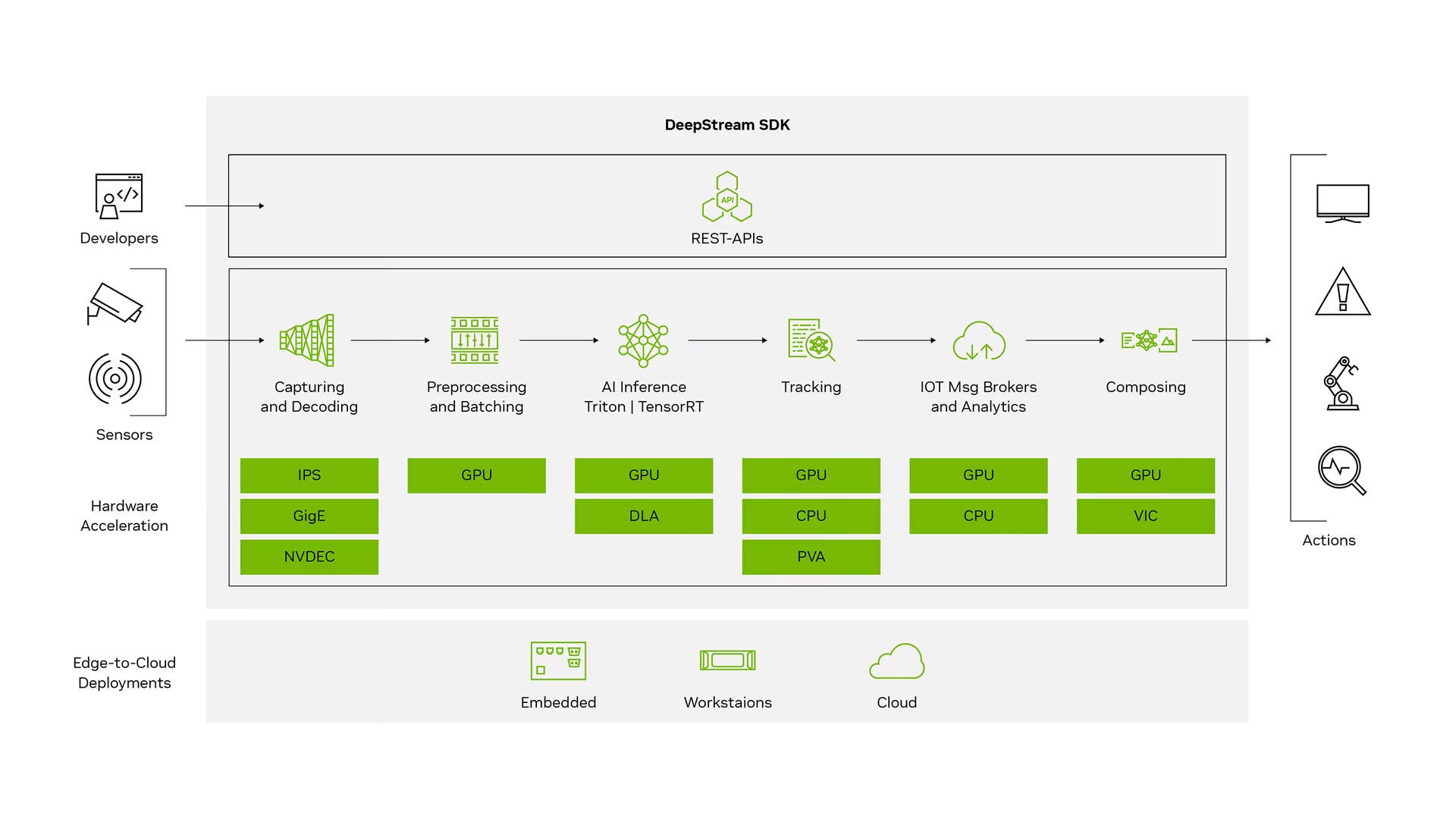
NVIDIA's DeepStream SDK ist ein vollständiges Streaming-Analytics-Toolkit auf Basis von GStreamer für KI-gestützte Multi-Sensor-Verarbeitung, Video-, Audio- und Bildverständnis. Es ist ideal für Vision-KI-Entwickler, Softwarepartner, Startups und OEMs, die IVA (Intelligent Video Analytics) Apps und Dienste entwickeln. Du kannst jetzt Stream-Processing-Pipelines erstellen, die neuronale Netze und andere komplexe Verarbeitungsaufgaben wie Tracking, Videokodierung/-dekodierung und Videorendering integrieren. Diese Pipelines ermöglichen Echtzeitanalysen von Video-, Bild- und Sensordaten. Die Multi-Plattform-Unterstützung von DeepStream bietet dir einen schnelleren und einfacheren Weg, Vision-KI-Anwendungen und -Dienste lokal, an der Edge und in der Cloud zu entwickeln.
Link to this sectionVoraussetzungen#
Bevor du diesem Leitfaden folgst:
- Besuche unsere Dokumentation, Quick Start Guide: NVIDIA Jetson mit Ultralytics YOLO26, um dein NVIDIA Jetson-Gerät für Ultralytics YOLO26 einzurichten.
- Installiere das DeepStream SDK entsprechend deiner JetPack-Version.
- Für JetPack 4.6.4 installiere DeepStream 6.0.1.
- Für JetPack 5.1.3 installiere DeepStream 6.3.
- Für JetPack 6.1 installiere DeepStream 7.1.
- Für JetPack 7.1 installiere DeepStream 9.0.
In diesem Leitfaden haben wir die Debian-Paketmethode zur Installation des DeepStream SDK auf dem Jetson-Gerät verwendet. Du kannst auch das DeepStream SDK on Jetson (Archived) besuchen, um auf ältere Versionen von DeepStream zuzugreifen.
Link to this sectionDeepStream-Konfiguration für YOLO26#
Hier verwenden wir das marcoslucianops/DeepStream-Yolo GitHub-Repository, das NVIDIA DeepStream SDK-Unterstützung für YOLO-Modelle beinhaltet. Wir schätzen die Bemühungen von marcoslucianops für seine Beiträge!
-
Installiere Ultralytics mit den erforderlichen Abhängigkeiten.
cd ~ pip install -U pip git clone https://github.com/ultralytics/ultralytics cd ultralytics pip install -e ".[export]" onnxslim -
Kone das DeepStream-Yolo Repository.
cd ~ git clone https://github.com/marcoslucianops/DeepStream-Yolo -
Kopiere die
export_yolo26.py-Datei aus demDeepStream-Yolo/utils-Verzeichnis in denultralytics-Ordner.cp ~/DeepStream-Yolo/utils/export_yolo26.py ~/ultralytics cd ultralytics -
Lade ein Ultralytics YOLO26-Erkennungsmodell (.pt) deiner Wahl aus den YOLO26-Releases herunter. Hier verwenden wir yolo26s.pt.
wget https://github.com/ultralytics/assets/releases/download/v8.4.0/yolo26s.pt
Du kannst auch ein benutzerdefiniertes YOLO26-Modell verwenden.
-
Konvertiere das Modell in ONNX.
python3 export_yolo26.py -w yolo26s.pt
Entferne für DeepStream 5.1 das --dynamic-Argument und verwende opset 12 oder niedriger. Das Standard-opset ist 17.
--opset 12Um die Inferenzgröße zu ändern (Standard: 640)
-s SIZE
--size SIZE
-s HEIGHT WIDTH
--size HEIGHT WIDTHBeispiel für 1280:
-s 1280
or
-s 1280 1280Um das ONNX-Modell zu vereinfachen (DeepStream >= 6.0)
--simplifyUm dynamische Batch-Größen zu verwenden (DeepStream >= 6.1)
--dynamicUm statische Batch-Größen zu verwenden (Beispiel für Batch-Größe = 4)
--batch 4-
Kopiere die generierte
.onnx-Modelldatei und dielabels.txt-Datei in denDeepStream-Yolo-Ordner.cp yolo26s.onnx labels.txt ~/DeepStream-Yolo cd ~/DeepStream-Yolo -
Setze die CUDA-Version entsprechend der installierten JetPack-Version.
Für JetPack 4.6.4:
export CUDA_VER=10.2Für JetPack 5.1.3:
export CUDA_VER=11.4Für JetPack 6.1:
export CUDA_VER=12.6 -
Kompiliere die Bibliothek.
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_Yolo -
Bearbeite die Datei
config_infer_primary_yolo26.txtentsprechend deinem Modell (für YOLO26s mit 80 Klassen).[property] ... onnx-file=yolo26s.onnx ... num-detected-classes=80 ... parse-bbox-func-name=NvDsInferParseYolo ...
YOLO26 skaliert die Eingabe mit Zentrierungspolsterung und läuft ohne NMS. Für die beste Genauigkeit, füge Folgendes zum [property]-Abschnitt von config_infer_primary_yolo26.txt hinzu:
[property]
...
maintain-aspect-ratio=1
symmetric-padding=1
cluster-mode=4
...-
Bearbeite die Datei
deepstream_app_config.... [primary-gie] ... config-file=config_infer_primary_yolo26.txt -
Du kannst auch die Videoquelle in der
deepstream_app_config-Datei ändern. Hier wird eine Standard-Videodatei geladen.... [source0] ... uri=file:///opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4
Link to this sectionFühre die Inferenz aus.#
deepstream-app -c deepstream_app_config.txtEs wird eine Weile dauern, die TensorRT-Engine-Datei zu generieren, bevor die Inferenz startet. Bitte habe also etwas Geduld.

Wenn du das Modell auf FP16-Präzision konvertieren möchtest, setze einfach model-engine-file=model_b1_gpu0_fp16.engine und network-mode=2 innerhalb von config_infer_primary_yolo26.txt.
Link to this sectionINT8-Kalibrierung#
Wenn du INT8-Präzision für die Inferenz verwenden möchtest, musst du die folgenden Schritte befolgen:
Derzeit funktioniert INT8 nicht mit TensorRT 10.x. Dieser Abschnitt des Leitfadens wurde mit TensorRT 8.x getestet, bei dem das funktionieren sollte.
-
Setze die
OPENCV-Umgebungsvariable.export OPENCV=1 -
Kompiliere die Bibliothek.
make -C nvdsinfer_custom_impl_Yolo clean && make -C nvdsinfer_custom_impl_Yolo -
Für den COCO-Datensatz lade val2017 herunter, entpacke ihn und verschiebe ihn in den
DeepStream-Yolo-Ordner. -
Erstelle ein neues Verzeichnis für Kalibrierungsbilder.
mkdir calibration -
Führe Folgendes aus, um 1000 zufällige Bilder aus dem COCO-Datensatz für die Kalibrierung auszuwählen.
for jpg in $(ls -1 val2017/*.jpg | sort -R | head -1000); do cp ${jpg} calibration/ done
NVIDIA empfiehlt mindestens 500 Bilder, um eine gute Genauigkeit zu erzielen. In diesem Beispiel werden 1000 Bilder gewählt, um eine bessere Genauigkeit zu erreichen (mehr Bilder = mehr Genauigkeit). Du kannst dies über head -1000 einstellen. Zum Beispiel für 2000 Bilder: head -2000. Dieser Prozess kann lange dauern.
-
Erstelle die
calibration.txt-Datei mit allen ausgewählten Bildern.realpath calibration/*jpg > calibration.txt -
Setze die Umgebungsvariablen.
export INT8_CALIB_IMG_PATH=calibration.txt export INT8_CALIB_BATCH_SIZE=1
Höhere INT8_CALIB_BATCH_SIZE-Werte führen zu mehr Genauigkeit und einer schnelleren Kalibrierungsgeschwindigkeit. Setze diesen Wert entsprechend deinem GPU-Speicher.
-
Aktualisiere die Datei
config_infer_primary_yolo26.txt.Von
... model-engine-file=model_b1_gpu0_fp32.engine #int8-calib-file=calib.table ... network-mode=0 ...Zu
... model-engine-file=model_b1_gpu0_int8.engine int8-calib-file=calib.table ... network-mode=1 ...
Link to this sectionINT8-Inferenz ausführen#
Führe denselben Befehl aus, um die INT8-Engine zu bauen und die Inferenz zu starten:
deepstream-app -c deepstream_app_config.txtLink to this sectionMultiStream-Einrichtung#
Watch: How to Run Multi-Stream Inference with Ultralytics YOLO26 using NVIDIA DeepStream on Jetson Orin 🚀
Um mehrere Streams unter einer einzigen DeepStream-Anwendung einzurichten, nimm die folgenden Änderungen an der deepstream_app_config.txt-Datei vor:
-
Ändere die Zeilen und Spalten, um eine Rasteranzeige entsprechend der Anzahl der Streams zu erstellen, die du haben möchtest. Zum Beispiel können wir für 4 Streams 2 Zeilen und 2 Spalten hinzufügen.
[tiled-display] rows=2 columns=2 -
Füge eine separate
[sourceN]-Gruppe für jeden Stream hinzu, jeweils mit eigeneruriundnum-sources=1.[source0] enable=1 type=3 uri=file:///path/to/video1.mp4 num-sources=1 [source1] enable=1 type=3 uri=file:///path/to/video2.mp4 num-sources=1 [source2] enable=1 type=3 uri=file:///path/to/video3.mp4 num-sources=1 [source3] enable=1 type=3 uri=file:///path/to/video4.mp4 num-sources=1
Link to this sectionMulti-Stream-Inferenz ausführen#
Führe denselben Befehl aus, um alle Streams in der Kachelanzeige zu starten:
deepstream-app -c deepstream_app_config.txt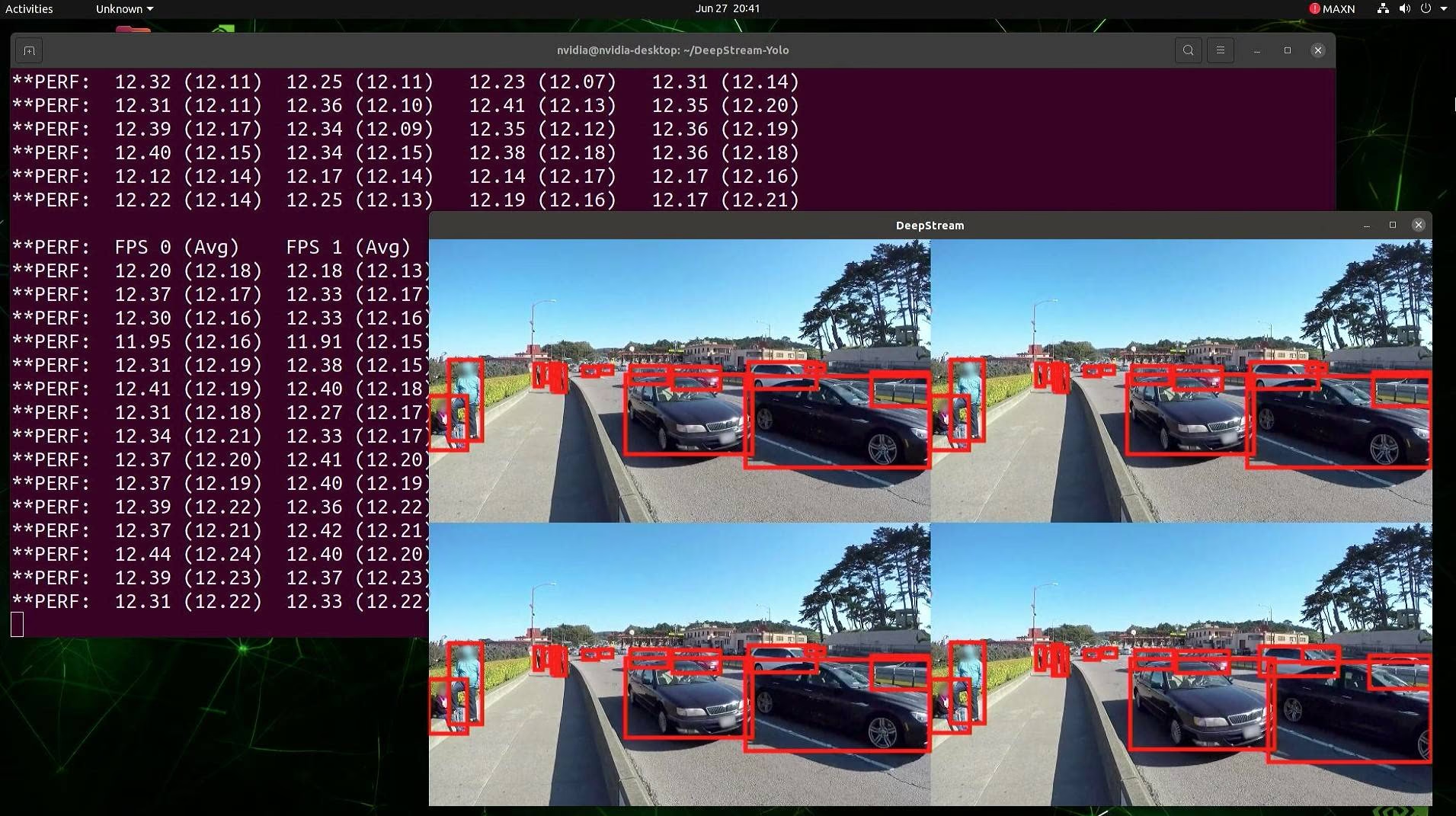
Link to this sectionBenchmark-Ergebnisse#
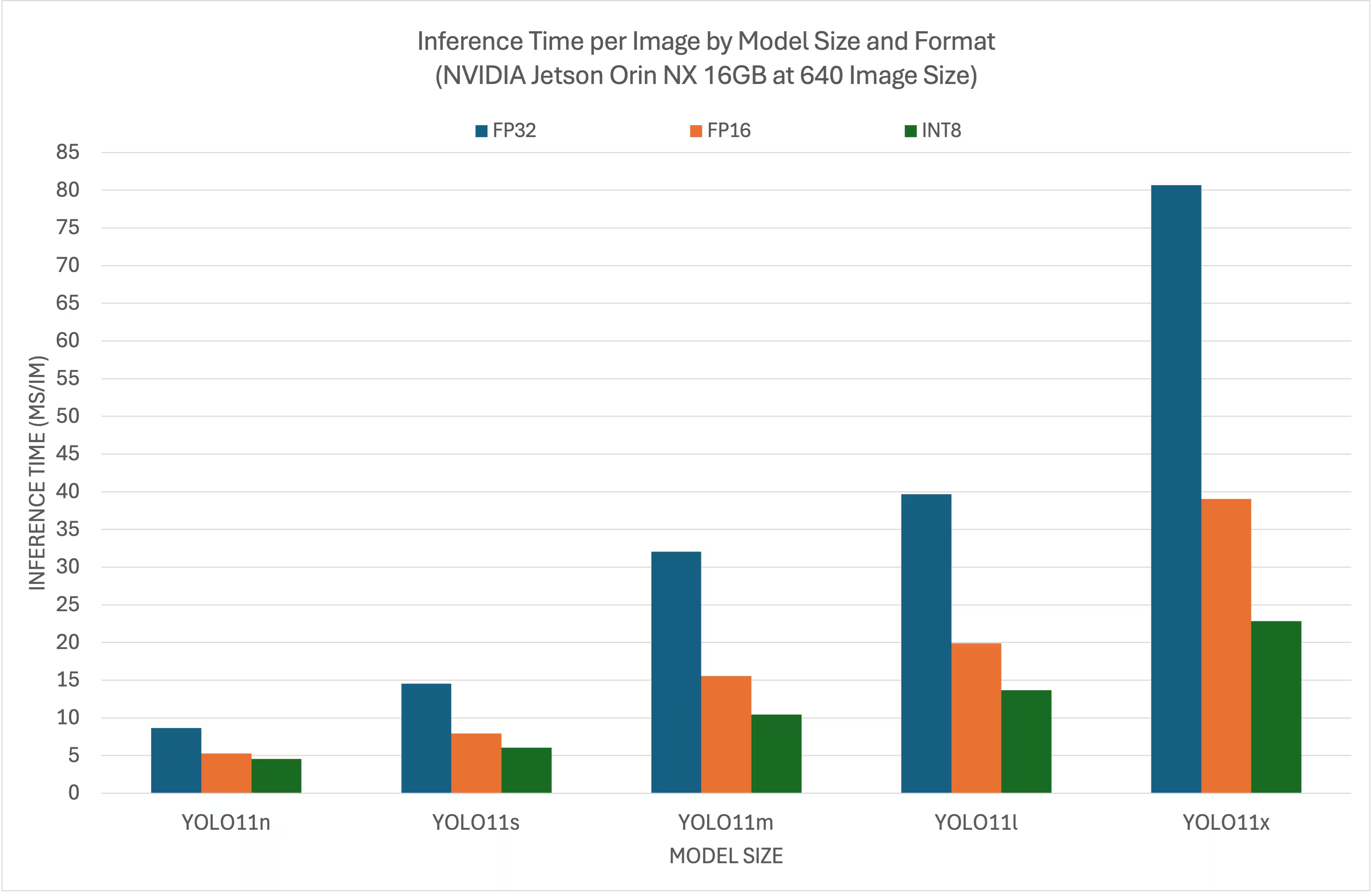
Die folgenden Benchmarks fassen zusammen, wie YOLO11-Modelle bei verschiedenen TensorRT-Präzisionsstufen mit einer Eingabegröße von 640x640 auf NVIDIA Jetson Orin NX 16GB abschneiden. YOLO26 verwendet denselben oben beschriebenen DeepStream-Export- und Inferenz-Workflow.
Link to this sectionVergleichsdiagramm#
Link to this sectionDetaillierte Vergleichstabelle#
| Format | Status | Inferenzzeit (ms/im) |
|---|---|---|
| TensorRT (FP32) | ✅ | 8.64 |
| TensorRT (FP16) | ✅ | 5.27 |
| TensorRT (INT8) | ✅ | 4.54 |
Link to this sectionDanksagungen#
Dieser Leitfaden wurde ursprünglich von unseren Freunden bei Seeed Studio, Lakshantha und Elaine, erstellt.
Link to this sectionFAQ#
Link to this sectionWie richte ich Ultralytics YOLO26 auf einem NVIDIA Jetson-Gerät ein?#
Um Ultralytics YOLO26 auf einem NVIDIA Jetson-Gerät einzurichten, musst du zuerst das DeepStream SDK installieren, das mit deiner JetPack-Version kompatibel ist. Folge der Schritt-für-Schritt-Anleitung in unserem Quick Start Guide, um deinen NVIDIA Jetson für die YOLO26-Bereitstellung zu konfigurieren.
Link to this sectionWas ist der Vorteil der Verwendung von TensorRT mit YOLO26 auf NVIDIA Jetson?#
Die Verwendung von TensorRT mit YOLO26 optimiert das Modell für die Inferenz, was die Latenz erheblich reduziert und den Durchsatz auf NVIDIA Jetson-Geräten verbessert. TensorRT bietet hochperformante Inferenz mit niedriger Latenz für Deep Learning durch Layer-Fusion, Präzisionskalibrierung und Kernel-Auto-Tuning. Dies führt zu einer schnelleren und effizienteren Ausführung, was besonders nützlich für Echtzeitanwendungen wie Videoanalysen und autonome Maschinen ist.
Link to this sectionKann ich Ultralytics YOLO26 mit dem DeepStream SDK auf verschiedenen NVIDIA Jetson-Hardware-Systemen ausführen?#
Ja, der Leitfaden für die Bereitstellung von Ultralytics YOLO26 mit dem DeepStream SDK und TensorRT ist mit der gesamten NVIDIA Jetson-Reihe kompatibel. Dies beinhaltet Geräte wie den Jetson Orin NX 16GB mit JetPack 5.1.3 und den Jetson Nano 4GB mit JetPack 4.6.4. Siehe den Abschnitt DeepStream-Konfiguration für YOLO26 für detaillierte Schritte.
Link to this sectionWie kann ich ein YOLO26-Modell für DeepStream in ONNX konvertieren?#
Um ein YOLO26-Modell für die Bereitstellung mit DeepStream in das ONNX-Format zu konvertieren, verwende das utils/export_yolo26.py-Skript aus dem DeepStream-Yolo-Repository.
Hier ist ein Beispielbefehl:
python3 utils/export_yolo26.py -w yolo26s.pt --opset 12 --simplifyWeitere Details zur Modellkonvertierung findest du in unserem Modell-Export-Abschnitt.
Link to this sectionWie führe ich eine INT8-Inferenz mit YOLO26 in DeepStream aus?#
Um eine INT8-Inferenz auszuführen, kalibriere das Modell anhand eines repräsentativen Bildsatzes und schalte die DeepStream-Konfiguration in den INT8-Modus. Lade die COCO val2017-Bilder herunter, wähle etwa 1000 Kalibrierungsbilder aus, setze die Umgebungsvariablen INT8_CALIB_IMG_PATH und INT8_CALIB_BATCH_SIZE und aktualisiere dann config_infer_primary_yolo26.txt mit model-engine-file=model_b1_gpu0_int8.engine, int8-calib-file=calib.table und network-mode=1. Siehe den Abschnitt INT8-Kalibrierung für die vollständigen Schritte. INT8 erfordert derzeit TensorRT 8.x.
Link to this sectionWie führe ich mehrere Kamerastreams mit DeepStream auf Jetson aus?#
Um mehrere Streams in einer einzigen DeepStream-Anwendung zu verarbeiten, bearbeite die Datei deepstream_app_config.txt, um ein Kachelanzeigeraster hinzuzufügen und jeden Quell-URI aufzulisten. Setze rows und columns unter [tiled-display], um das Raster zu erstellen, füge eine separate [sourceN]-Gruppe pro Stream mit eigener uri und num-sources=1 hinzu und passe das Raster an die Anzahl der Streams an. Siehe den Abschnitt Multi-Stream-Setup für ein vollständiges Beispiel.
Link to this sectionWas sind die Performance-Benchmarks für YOLO auf NVIDIA Jetson Orin NX?#
Die Leistung von YOLO11-Modellen auf NVIDIA Jetson Orin NX 16GB variiert je nach TensorRT-Präzisionsstufen. Zum Beispiel erreichen YOLO11s-Modelle:
- FP32-Präzision: 14,53 ms/Bild, 68,8 FPS
- FP16-Präzision: 7,91 ms/Bild, 126 FPS
- INT8-Präzision: 6,05 ms/Bild, 165 FPS
Diese Benchmarks unterstreichen die Effizienz und Leistungsfähigkeit der Verwendung von TensorRT-optimierten YOLO11-Modellen auf NVIDIA Jetson-Hardware. Weitere Details findest du in unserem Abschnitt Benchmark-Ergebnisse.