Link to this sectionUltralytics를 활용한 K-Fold 교차 검증#
Link to this section소개#
이 포괄적인 가이드는 Ultralytics 생태계 내의 객체 탐지 데이터셋에 대해 K-Fold 교차 검증을 구현하는 방법을 설명합니다. YOLO 탐지 형식과 sklearn, pandas, PyYAML과 같은 핵심 Python 라이브러리를 활용하여 필요한 설정, 특징 벡터 생성 과정, 그리고 K-Fold 데이터셋 분할 실행 과정을 안내합니다.
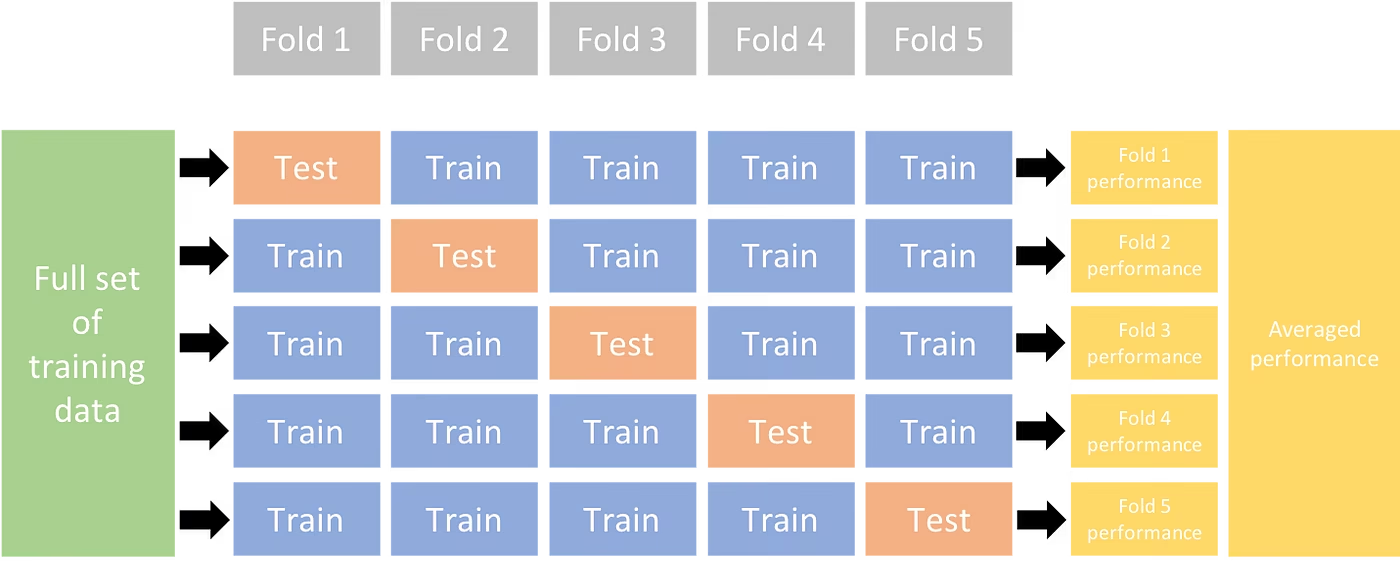
프로젝트에 Fruit Detection 데이터셋이 사용되든 커스텀 데이터 소스가 사용되든, 본 튜토리얼은 머신 러닝 모델의 신뢰성과 견고성을 강화하기 위해 K-Fold 교차 검증을 이해하고 적용하도록 돕는 것을 목표로 합니다. 이 튜토리얼에서는 k=5 폴드를 적용하지만, 최적의 폴드 수는 데이터셋과 프로젝트의 세부 사항에 따라 달라질 수 있다는 점을 유의하십시오.
시작해 보겠습니다.
Link to this section설정#
-
어노테이션은 YOLO 탐지 형식이어야 합니다.
-
이 가이드는 어노테이션 파일이 로컬에 준비되어 있다고 가정합니다.
-
시연을 위해 Fruit Detection 데이터셋을 사용합니다.
- 이 데이터셋에는 총 8479개의 이미지가 포함되어 있습니다.
- 6개의 클래스 라벨이 포함되어 있으며, 각 라벨의 총 인스턴스 수는 아래와 같습니다.
| 클래스 라벨 | 인스턴스 수 |
|---|---|
| Apple | 7049 |
| Grapes | 7202 |
| Pineapple | 1613 |
| Orange | 15549 |
| Banana | 3536 |
| Watermelon | 1976 |
-
필요한 Python 패키지는 다음과 같습니다:
ultralyticssklearnpandaspyyaml
-
이 튜토리얼은
k=5폴드로 진행됩니다. 하지만 구체적인 데이터셋에 가장 적합한 폴드 수를 결정해야 합니다.
-
프로젝트를 위한 새로운 Python 가상 환경(
venv)을 시작하고 활성화하십시오.pip(또는 선호하는 패키지 관리자)를 사용하여 설치합니다:- Ultralytics 라이브러리:
pip install -U ultralytics. 대안으로 공식 저장소를 복제할 수 있습니다. - Scikit-learn, pandas 및 PyYAML:
pip install -U scikit-learn pandas pyyaml.
- Ultralytics 라이브러리:
-
어노테이션이 YOLO 탐지 형식인지 확인하십시오.
- 이 튜토리얼에서는 모든 어노테이션 파일이
Fruit-Detection/labels디렉토리에 있다고 가정합니다.
- 이 튜토리얼에서는 모든 어노테이션 파일이
Link to this section객체 탐지 데이터셋을 위한 특징 벡터 생성#
-
아래 단계를 위해 새로운
example.pyPython 파일을 만드는 것으로 시작하십시오. -
데이터셋의 모든 라벨 파일을 검색하는 단계로 진행합니다.
from pathlib import Path dataset_path = Path("./Fruit-detection") # replace with 'path/to/dataset' for your custom data labels = sorted(dataset_path.rglob("*labels/*.txt")) # all data in 'labels' -
이제 데이터셋 YAML 파일의 내용을 읽고 클래스 라벨의 인덱스를 추출하십시오.
import yaml yaml_file = "path/to/data.yaml" # your data YAML with data directories and names dictionary with open(yaml_file, encoding="utf8") as y: classes = yaml.safe_load(y)["names"] cls_idx = sorted(classes.keys()) -
빈
pandasDataFrame을 초기화합니다.import pandas as pd index = [label.stem for label in labels] # uses base filename as ID (no extension) labels_df = pd.DataFrame([], columns=cls_idx, index=index) -
어노테이션 파일에 존재하는 각 클래스 라벨의 인스턴스 수를 계산합니다.
from collections import Counter for label in labels: lbl_counter = Counter() with open(label) as lf: lines = lf.readlines() for line in lines: # classes for YOLO label uses integer at first position of each line lbl_counter[int(line.split(" ", 1)[0])] += 1 labels_df.loc[label.stem] = lbl_counter labels_df = labels_df.fillna(0.0) # replace `nan` values with `0.0` -
다음은 생성된 DataFrame의 샘플 뷰입니다:
0 1 2 3 4 5 '0000a16e4b057580_jpg.rf.00ab48988370f64f5ca8ea4...' 0.0 0.0 0.0 0.0 0.0 7.0 '0000a16e4b057580_jpg.rf.7e6dce029fb67f01eb19aa7...' 0.0 0.0 0.0 0.0 0.0 7.0 '0000a16e4b057580_jpg.rf.bc4d31cdcbe229dd022957a...' 0.0 0.0 0.0 0.0 0.0 7.0 '00020ebf74c4881c_jpg.rf.508192a0a97aa6c4a3b6882...' 0.0 0.0 0.0 1.0 0.0 0.0 '00020ebf74c4881c_jpg.rf.5af192a2254c8ecc4188a25...' 0.0 0.0 0.0 1.0 0.0 0.0 ... ... ... ... ... ... ... 'ff4cd45896de38be_jpg.rf.c4b5e967ca10c7ced3b9e97...' 0.0 0.0 0.0 0.0 0.0 2.0 'ff4cd45896de38be_jpg.rf.ea4c1d37d2884b3e3cbce08...' 0.0 0.0 0.0 0.0 0.0 2.0 'ff5fd9c3c624b7dc_jpg.rf.bb519feaa36fc4bf630a033...' 1.0 0.0 0.0 0.0 0.0 0.0 'ff5fd9c3c624b7dc_jpg.rf.f0751c9c3aa4519ea3c9d6a...' 1.0 0.0 0.0 0.0 0.0 0.0 'fffe28b31f2a70d4_jpg.rf.7ea16bd637ba0711c53b540...' 0.0 6.0 0.0 0.0 0.0 0.0
행은 데이터셋의 이미지에 해당하는 라벨 파일을 인덱싱하고, 열은 클래스 라벨 인덱스에 해당합니다. 각 행은 데이터셋에 존재하는 각 클래스 라벨의 개수를 나타내는 의사 특징 벡터(pseudo feature-vector)입니다. 이 데이터 구조를 통해 객체 탐지 데이터셋에 K-Fold 교차 검증을 적용할 수 있습니다.
Link to this sectionK-Fold 데이터셋 분할#
-
Now we will use the
KFoldclass fromsklearn.model_selectionto generateksplits of the dataset.- 중요:
shuffle=True로 설정하면 분할 내 클래스의 무작위 분포를 보장할 수 있습니다.random_state=M(여기서M은 선택한 정수)을 설정하여 재현 가능한 결과를 얻을 수 있습니다.
import random from sklearn.model_selection import KFold random.seed(0) # for reproducibility ksplit = 5 kf = KFold(n_splits=ksplit, shuffle=True, random_state=20) # setting random_state for repeatable results kfolds = list(kf.split(labels_df)) - 중요:
-
데이터셋이 이제
k개의 폴드로 분할되었으며, 각 폴드에는train및val인덱스 목록이 있습니다. 이 결과를 더 명확하게 표시하기 위해 DataFrame을 구성하겠습니다.folds = [f"split_{n}" for n in range(1, ksplit + 1)] folds_df = pd.DataFrame(index=index, columns=folds) for i, (train, val) in enumerate(kfolds, start=1): folds_df[f"split_{i}"].loc[labels_df.iloc[train].index] = "train" folds_df[f"split_{i}"].loc[labels_df.iloc[val].index] = "val" -
이제 각 폴드에 대해
val에 존재하는 클래스와train에 존재하는 클래스의 비율로 클래스 라벨 분포를 계산합니다.fold_lbl_distrb = pd.DataFrame(index=folds, columns=cls_idx) for n, (train_indices, val_indices) in enumerate(kfolds, start=1): train_totals = labels_df.iloc[train_indices].sum() val_totals = labels_df.iloc[val_indices].sum() # To avoid division by zero, we add a small value (1E-7) to the denominator ratio = val_totals / (train_totals + 1e-7) fold_lbl_distrb.loc[f"split_{n}"] = ratio이상적인 시나리오는 모든 클래스 비율이 각 분할 및 클래스 전반에 걸쳐 상당히 유사한 것입니다. 그러나 이는 데이터셋의 세부 사항에 따라 달라집니다.
-
다음으로 각 분할에 대한 디렉토리와 데이터셋 YAML 파일을 생성합니다.
import datetime supported_extensions = [".jpg", ".jpeg", ".png"] # Initialize an empty list to store image file paths images = [] # Loop through supported extensions and gather image files for ext in supported_extensions: images.extend(sorted((dataset_path / "images").rglob(f"*{ext}"))) # Create the necessary directories and dataset YAML files save_path = Path(dataset_path / f"{datetime.date.today().isoformat()}_{ksplit}-Fold_Cross-val") save_path.mkdir(parents=True, exist_ok=True) ds_yamls = [] for split in folds_df.columns: # Create directories split_dir = save_path / split split_dir.mkdir(parents=True, exist_ok=True) (split_dir / "train" / "images").mkdir(parents=True, exist_ok=True) (split_dir / "train" / "labels").mkdir(parents=True, exist_ok=True) (split_dir / "val" / "images").mkdir(parents=True, exist_ok=True) (split_dir / "val" / "labels").mkdir(parents=True, exist_ok=True) # Create dataset YAML files dataset_yaml = split_dir / f"{split}_dataset.yaml" ds_yamls.append(dataset_yaml) with open(dataset_yaml, "w") as ds_y: yaml.safe_dump( { "path": split_dir.as_posix(), "train": "train", "val": "val", "names": classes, }, ds_y, ) -
마지막으로 각 분할에 대해 이미지와 라벨을 해당 디렉토리('train' 또는 'val')로 복사합니다.
- 참고: 이 코드 부분에 소요되는 시간은 데이터셋 크기와 시스템 하드웨어에 따라 달라집니다.
import shutil from tqdm import tqdm for image, label in tqdm(zip(images, labels), total=len(images), desc="Copying files"): for split, k_split in folds_df.loc[image.stem].items(): # Destination directory img_to_path = save_path / split / k_split / "images" lbl_to_path = save_path / split / k_split / "labels" # Copy image and label files to new directory (SamefileError if file already exists) shutil.copy(image, img_to_path / image.name) shutil.copy(label, lbl_to_path / label.name)
Link to this section기록 저장(선택 사항)#
선택적으로, 향후 참조를 위해 K-Fold 분할 기록과 라벨 분포 DataFrame을 CSV 파일로 저장할 수 있습니다.
folds_df.to_csv(save_path / "kfold_datasplit.csv")
fold_lbl_distrb.to_csv(save_path / "kfold_label_distribution.csv")Link to this sectionK-Fold 데이터 분할을 사용하여 YOLO 학습#
-
먼저 YOLO 모델을 로드합니다.
from ultralytics import YOLO weights_path = "path/to/weights.pt" # use yolo26n.pt for a small model model = YOLO(weights_path, task="detect") -
다음으로 데이터셋 YAML 파일을 반복하여 학습을 실행합니다. 결과는
project및name인수에 지정된 디렉토리에 저장됩니다. 기본적으로 이 디렉토리는 'runs/detect/train#'이며, 여기서 #은 정수 인덱스입니다.results = {} # Define your additional arguments here batch = 16 project = "kfold_demo" epochs = 100 for k, dataset_yaml in enumerate(ds_yamls): model = YOLO(weights_path, task="detect") results[k] = model.train( data=dataset_yaml, epochs=epochs, batch=batch, project=project, name=f"fold_{k + 1}" ) # include any additional train arguments -
Ultralytics data.split.autosplit 함수를 사용하여 데이터셋을 자동으로 분할할 수도 있습니다:
from ultralytics.data.split import autosplit # Automatically split dataset into train/val/test autosplit(path="path/to/images", weights=(0.8, 0.2, 0.0), annotated_only=True)
Link to this section결론#
이 가이드에서는 YOLO 객체 탐지 모델을 학습하기 위해 K-Fold 교차 검증을 사용하는 과정을 살펴보았습니다. 데이터셋을 K개의 파티션으로 나누어 다양한 폴드 전반에서 균형 잡힌 클래스 분포를 보장하는 방법을 배웠습니다.
또한 데이터 분할 및 라벨 분포를 시각화하기 위해 리포트 DataFrame을 생성하는 절차를 살펴보고, 학습 및 검증 세트의 구조에 대한 명확한 통찰력을 얻었습니다.
선택적으로 향후 참조를 위해 기록을 저장했으며, 이는 대규모 프로젝트나 모델 성능 문제 해결 시 특히 유용할 수 있습니다.
마지막으로 루프 내에서 각 분할을 사용하여 실제 모델 학습을 구현하고 추가 분석 및 비교를 위해 학습 결과를 저장했습니다.
이 K-Fold 교차 검증 기술은 가용한 데이터를 최대한 활용하는 강력한 방법이며, 모델 성능이 서로 다른 데이터 하위 집합 전반에서 신뢰할 수 있고 일관되도록 돕습니다. 그 결과 특정 데이터 패턴에 과적합될 가능성이 적은 보다 일반화되고 신뢰할 수 있는 모델이 만들어집니다.
이 가이드에서는 YOLO를 사용했지만, 이러한 단계는 대부분 다른 머신 러닝 모델에도 적용 가능하다는 점을 기억하십시오. 이러한 단계를 이해하면 자신의 머신 러닝 프로젝트에서 효과적으로 교차 검증을 적용할 수 있습니다.
Link to this sectionFAQ#
Link to this sectionK-Fold 교차 검증이란 무엇이며 객체 탐지에서 왜 유용한가요?#
K-Fold 교차 검증은 모델 성능을 더 신뢰성 있게 평가하기 위해 데이터셋을 'k'개의 하위 집합(폴드)으로 나누는 기술입니다. 각 폴드는 학습 및 검증 데이터 역할을 모두 수행합니다. 객체 탐지 맥락에서 K-Fold 교차 검증을 사용하면 Ultralytics YOLO 모델의 성능이 다양한 데이터 분할 전반에서 견고하고 일반화되어 신뢰성이 향상됩니다. Ultralytics YOLO로 K-Fold 교차 검증을 설정하는 자세한 지침은 Ultralytics를 활용한 K-Fold 교차 검증을 참조하십시오.
Link to this sectionUltralytics YOLO를 사용하여 K-Fold 교차 검증을 구현하려면 어떻게 해야 하나요?#
Ultralytics YOLO로 K-Fold 교차 검증을 구현하려면 다음 단계를 따라야 합니다:
- 어노테이션이 YOLO 탐지 형식인지 확인하십시오.
sklearn,pandas,pyyaml과 같은 Python 라이브러리를 사용하십시오.- 데이터셋에서 특징 벡터를 생성하십시오.
- Split your dataset using
KFoldfromsklearn.model_selection. - 각 분할에서 YOLO 모델을 학습시키십시오.
포괄적인 가이드는 문서의 K-Fold 데이터셋 분할 섹션을 참조하십시오.
Link to this section객체 탐지에 Ultralytics YOLO를 사용해야 하는 이유는 무엇인가요?#
Ultralytics YOLO offers state-of-the-art, real-time object detection with high accuracy and efficiency. It's versatile, supporting multiple computer vision tasks such as detection, instance segmentation, semantic segmentation, and classification. Additionally, it integrates seamlessly with tools like Ultralytics Platform for no-code model training and deployment. For more details, explore the benefits and features on our Ultralytics YOLO page.
Link to this sectionUltralytics YOLO에 맞는 올바른 형식의 어노테이션인지 어떻게 확인하나요?#
어노테이션은 YOLO 탐지 형식을 따라야 합니다. 각 어노테이션 파일에는 이미지 내 바운딩 박스 좌표와 함께 객체 클래스가 나열되어야 합니다. YOLO 형식은 객체 탐지 모델 학습을 위한 간소화되고 표준화된 데이터 처리를 보장합니다. 적절한 어노테이션 형식에 대한 자세한 내용은 YOLO 탐지 형식 가이드를 방문하십시오.
Link to this sectionFruit Detection 외의 커스텀 데이터셋에도 K-Fold 교차 검증을 사용할 수 있나요?#
네, 어노테이션이 YOLO 탐지 형식이라면 어떤 커스텀 데이터셋에도 K-Fold 교차 검증을 사용할 수 있습니다. 데이터셋 경로와 클래스 라벨을 커스텀 데이터셋에 맞는 것으로 교체하십시오. 이러한 유연성 덕분에 모든 객체 탐지 프로젝트가 K-Fold 교차 검증을 통해 견고한 모델 평가의 이점을 누릴 수 있습니다. 실용적인 예제는 특징 벡터 생성 섹션을 검토하십시오.