Link to this sectionMapas de calor de seguimiento de objetos con Ultralytics YOLO26#
![]()
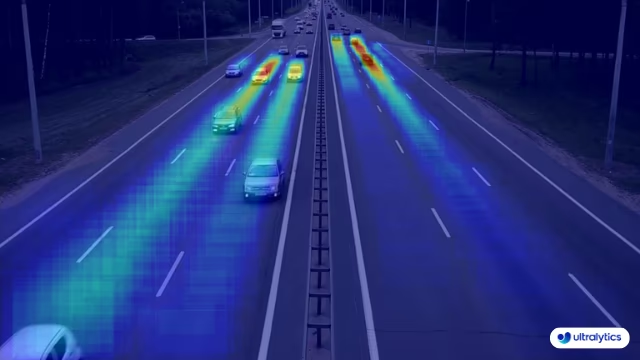
La solución de mapa de calor en Ultralytics YOLO26 rastrea objetos a través de fotogramas de vídeo y superpone su intensidad de movimiento acumulada en cada fotograma, por lo que las zonas concurridas brillan en colores cálidos mientras que las zonas tranquilas permanecen frías. Construida sobre el seguimiento de objetos de YOLO26, convierte cualquier vídeo en un mapa de actividad espacial que revela el flujo de tráfico, el movimiento de multitudes y las zonas de permanencia con una simple llamada de Python o un comando de CLI.
Watch: Heatmaps using Ultralytics YOLO26
Link to this section¿Por qué usar mapas de calor para el análisis de vídeo?#
- Detecta patrones de actividad de un vistazo: La intensidad se acumula donde los objetos rastreados pasan tiempo, por lo que los carriles de mucho tráfico, los estantes populares o los cuellos de botella de multitudes destacan sin necesidad de revisar fotograma a fotograma manualmente.
- Seguimiento integrado: La solución ejecuta la detección y el seguimiento de YOLO26 internamente, por lo que no hay una canalización de seguimiento separada que configurar.
- Conteo en la misma pasada: Pasa una
regionpara contar los objetos que entran y salen de una zona mientras se crea el mapa de calor, combinando dos tareas de análisis en una sola ejecución.
Link to this sectionAplicaciones en el mundo real#
| Transporte | Comercio minorista |
|---|---|
 |  |
| Mapa de calor de transporte de Ultralytics YOLO | Mapa de calor minorista de Ultralytics YOLO |
Link to this sectionCómo generar mapas de calor con Ultralytics YOLO#
Ejecuta la solución de mapa de calor en una fuente de vídeo desde la CLI o Python. El ejemplo de Python escribe los fotogramas procesados en un archivo de vídeo de salida:
# Run a heatmap example
yolo solutions heatmap show=True
# Pass a source video
yolo solutions heatmap source="path/to/video.mp4"
# Pass a custom colormap
yolo solutions heatmap colormap=cv2.COLORMAP_INFERNO
# Heatmaps + object counting
yolo solutions heatmap region="[(20, 400), (1080, 400), (1080, 360), (20, 360)]"Link to this sectionArgumentos de Heatmap()#
Aquí tienes una tabla con los argumentos de Heatmap:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
model | str | None | Ruta a un archivo de modelo YOLO de Ultralytics. |
colormap | int | cv2.COLORMAP_DEEPGREEN | Mapa de colores a usar para el mapa de calor. |
show_in | bool | True | Flag para controlar si se muestran los conteos de entrada en la transmisión de vídeo. |
show_out | bool | True | Flag para controlar si se muestran los conteos de salida en la transmisión de vídeo. |
region | list o dict | None | Puntos que definen la región de interés, ya sea una lista de tuplas (x, y) o un diccionario que asocia nombres de regiones con listas de puntos para múltiples regiones (solo RegionCounter). Cuando es None, las soluciones que requieren una región recurren a un valor predeterminado. |
También puedes aplicar diferentes argumentos de track en la solución Heatmap.
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
tracker | str | 'tracktrack.yaml' | Especifica el algoritmo de seguimiento a utilizar. Opciones integradas: botsort.yaml, bytetrack.yaml, ocsort.yaml, deepocsort.yaml, fasttrack.yaml, tracktrack.yaml. |
conf | float | 0.1 | Establece el umbral de confianza para las detecciones; valores más bajos permiten el seguimiento de más objetos, pero pueden incluir falsos positivos. |
iou | float | 0.7 | Establece el umbral de Intersection over Union (IoU) para filtrar detecciones superpuestas. |
classes | list | None | Filtra los resultados por índice de clase. Por ejemplo, classes=[0, 2, 3] solo rastrea las clases especificadas. |
verbose | bool | True | Controla la visualización de los resultados de seguimiento, proporcionando una salida visual de los objetos rastreados. |
device | str | None | Especifica el dispositivo para la inferencia (p. ej., cpu, cuda:0 o 0). Permite a los usuarios seleccionar entre CPU, una GPU específica u otros dispositivos de computación para la ejecución del modelo. |
Además, los argumentos de visualización compatibles se enumeran a continuación:
| Argumento | Tipo | Predeterminado | Descripción |
|---|---|---|---|
show | bool | False | Si es True, muestra las imágenes o vídeos anotados en una ventana. Útil para una retroalimentación visual inmediata durante el desarrollo o las pruebas. |
line_width | int or None | None | Especifica el ancho de línea de los cuadros delimitadores. Si es None, el ancho de línea se ajusta automáticamente según el tamaño de la imagen. Proporciona personalización visual para mayor claridad. |
show_conf | bool | True | Muestra la puntuación de confianza para cada detección junto a la etiqueta. Proporciona información sobre la certeza del modelo para cada detección. |
show_labels | bool | True | Muestra las etiquetas para cada detección en la salida visual. Proporciona una comprensión inmediata de los objetos detectados. |
Link to this sectionMapas de colores de mapas de calor#
El argumento colormap acepta cualquier mapa de colores de OpenCV. Pasa la constante del módulo cv2, por ejemplo colormap=cv2.COLORMAP_INFERNO:
| Nombre del mapa de colores | Descripción |
|---|---|
cv2.COLORMAP_AUTUMN | Mapa de colores Autumn |
cv2.COLORMAP_BONE | Mapa de colores Bone |
cv2.COLORMAP_JET | Mapa de colores Jet |
cv2.COLORMAP_WINTER | Mapa de colores Winter |
cv2.COLORMAP_RAINBOW | Mapa de colores Rainbow |
cv2.COLORMAP_OCEAN | Mapa de colores Ocean |
cv2.COLORMAP_SUMMER | Mapa de colores Summer |
cv2.COLORMAP_SPRING | Mapa de colores Spring |
cv2.COLORMAP_COOL | Mapa de colores Cool |
cv2.COLORMAP_HSV | Mapa de colores HSV (Tono, Saturación, Valor) |
cv2.COLORMAP_PINK | Mapa de colores Pink |
cv2.COLORMAP_HOT | Mapa de colores Hot |
cv2.COLORMAP_PARULA | Mapa de colores Parula |
cv2.COLORMAP_MAGMA | Mapa de colores Magma |
cv2.COLORMAP_INFERNO | Mapa de colores Inferno |
cv2.COLORMAP_PLASMA | Mapa de colores Plasma |
cv2.COLORMAP_VIRIDIS | Mapa de colores Viridis |
cv2.COLORMAP_CIVIDIS | Mapa de colores Cividis |
cv2.COLORMAP_TWILIGHT | Mapa de colores Twilight |
cv2.COLORMAP_TWILIGHT_SHIFTED | Mapa de colores Twilight desplazado |
cv2.COLORMAP_TURBO | Mapa de colores Turbo |
cv2.COLORMAP_DEEPGREEN | Mapa de colores Deep Green |
Link to this sectionCómo funcionan los mapas de calor#
La solución de mapa de calor extiende la clase ObjectCounter. En el primer fotograma procesado, crea una capa de intensidad en blanco que coincide con el tamaño del fotograma. Luego, cada fotograma se procesa en dos pasos:
- El seguimiento de YOLO26 detecta y sigue a cada objeto en el fotograma
- Para cada objeto rastreado, la intensidad del mapa de calor aumenta dentro de una región circular centrada en su cuadro delimitador
Una vez por fotograma, la capa de intensidad acumulada se normaliza, se colorea con el mapa de colores seleccionado y se combina con el fotograma original. La superposición aparece tan pronto como se rastrea al menos un objeto; los fotogramas sin objetos rastreados se muestran sin la superposición del mapa de calor.
El resultado es una visualización dinámica que se construye con el tiempo, revelando patrones de tráfico, movimientos de multitudes u otros comportamientos espaciales en tus datos de vídeo. Cuando se establece una region, la solución también cuenta los objetos que entran y salen de esa región mientras se crea el mapa de calor.
Link to this sectionConclusión#
La solución de mapa de calor de Ultralytics YOLO26 convierte los resultados del seguimiento de objetos en una superposición de actividad intuitiva con unas pocas líneas de código. Para ir más allá, combínalo con conteo de objetos, explora las otras soluciones de Ultralytics o lee sobre el modo de seguimiento subyacente.
Link to this sectionFAQ#
Link to this section¿Cómo genera mapas de calor Ultralytics YOLO26 a partir de un vídeo?#
Ultralytics YOLO26 genera mapas de calor rastreando objetos a través de fotogramas de vídeo y acumulando un valor de intensidad en la ubicación de cada objeto rastreado, luego colorea el resultado y lo combina con el fotograma original. Las áreas donde aparecen objetos con frecuencia o permanecen tiempo acumulan mayor intensidad y se renderizan en colores más cálidos. Para conocer las opciones de configuración, consulta la sección de Argumentos de Heatmap().
Link to this section¿Cómo guardo la salida del mapa de calor en un archivo de vídeo?#
Usa cv2.VideoWriter de OpenCV y escribe results.plot_im para cada fotograma procesado, como se muestra en el ejemplo principal. El atributo plot_im contiene el fotograma con la superposición del mapa de calor ya aplicada.
Link to this section¿Puedo combinar mapas de calor con el conteo de objetos?#
Sí. Pasa un argumento region a Heatmap() con puntos de línea, rectángulo o polígono, y la solución contará los objetos que entran y salen de esa región mientras se construye el mapa de calor. Los resultados devueltos incluyen in_count, out_count y conteos por clase. Consulta la guía de conteo de objetos para obtener detalles sobre la configuración de la región.
Link to this section¿Cómo puedo visualizar solo clases de objetos específicas en los mapas de calor usando Ultralytics YOLO26?#
Pasa el argumento classes a Heatmap() con los índices de clase que deseas mantener. Por ejemplo, classes=[0, 2] construye el mapa de calor solo a partir de personas y coches (índices de clase COCO 0 y 2):
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("path/to/video.mp4")
heatmap = solutions.Heatmap(show=True, model="yolo26n.pt", classes=[0, 2])
while cap.isOpened():
success, im0 = cap.read()
if not success:
break
results = heatmap(im0)
cap.release()
cv2.destroyAllWindows()Link to this section¿Qué hace que los mapas de calor de Ultralytics YOLO26 sean diferentes de otras herramientas de visualización de datos como las de OpenCV o Matplotlib?#
Los mapas de calor de Ultralytics YOLO26 integran la detección de objetos, el seguimiento, la acumulación de intensidad y el renderizado de superposiciones en una sola llamada, mientras que herramientas genéricas como OpenCV o Matplotlib requieren que construyas esa canalización tú mismo. La solución procesa flujos de vídeo en tiempo real y admite seguimiento persistente y mapas de colores personalizables de forma inmediata. Para obtener detalles sobre el modelo subyacente, consulta la página del modelo YOLO26.