패키지 분할 데이터 세트
![]()
패키지 분할 데이터셋은 컴퓨터 비전 분야에서 패키지 분할과 관련된 작업을 위해 특별히 맞춤 제작된 선별된 이미지 모음입니다. 본 데이터셋은 주로 이미지 분할 작업에 초점을 맞추어 패키지 식별, 분류 및 취급과 관련된 프로젝트를 수행하는 연구자, 개발자 및 애호가들을 지원하기 위해 설계되었습니다.
참고: Ultralytics YOLO26을 사용하여 패키지 분할 모델 훈련 | 산업용 패키지 🎉
다양한 컨텍스트와 환경에서 다양한 패키지를 보여주는 다양한 이미지 세트를 포함하는 이 데이터 세트는 분할 모델을 훈련하고 평가하는 데 유용한 리소스 역할을 합니다. 물류, 창고 자동화 또는 정확한 패키지 분석이 필요한 모든 애플리케이션에 참여하든 패키지 분할 데이터 세트는 컴퓨터 비전 알고리즘의 성능을 향상시키기 위한 포괄적이고 목표가 분명한 이미지 세트를 제공합니다. 데이터 세트 개요 페이지에서 분할 작업에 대한 더 많은 데이터 세트를 살펴보십시오.
데이터 세트 구조
패키지 분할 데이터 세트의 데이터 분포는 다음과 같이 구성됩니다.
- 학습 세트: 해당 어노테이션이 첨부된 1920개의 이미지를 포함합니다.
- 테스트 세트: 각각의 어노테이션과 함께 89개의 이미지로 구성됩니다.
- 검증 세트: 각 이미지에 해당하는 어노테이션이 있는 188개의 이미지로 구성됩니다.
응용 분야
패키지 분할은 패키지 분할 데이터 세트에 의해 촉진되며, 물류 최적화, 라스트마일 배송 개선, 제조 품질 관리 개선 및 스마트 시티 솔루션에 기여하는 데 매우 중요합니다. 전자 상거래에서 보안 애플리케이션에 이르기까지 이 데이터 세트는 다양하고 효율적인 패키지 분석 애플리케이션을 위한 컴퓨터 비전의 혁신을 촉진하는 핵심 리소스입니다.
스마트 창고 및 물류
현대 창고에서 비전 AI 솔루션은 패키지 식별 및 분류를 자동화하여 운영을 간소화할 수 있습니다. 이 데이터셋으로 훈련된 컴퓨터 비전 모델은 어두운 조명이나 복잡한 공간과 같은 어려운 환경에서도 실시간으로 패키지를 빠르게 detect하고 segment할 수 있습니다. 이는 처리 시간을 단축하고 오류를 줄이며 물류 운영의 전반적인 효율성을 향상시킵니다.
품질 관리 및 손상 감지
패키지 분할 모델은 모양과 외관을 분석하여 손상된 패키지를 식별하는 데 사용할 수 있습니다. 패키지 윤곽선에서 불규칙성 또는 변형을 감지하여 이러한 모델은 손상되지 않은 패키지만 공급망을 통해 진행되도록 하여 고객 불만 및 반품률을 줄이는 데 도움이 됩니다. 이는 제조업의 품질 관리의 핵심 측면이며 제품 무결성을 유지하는 데 매우 중요합니다.
데이터세트 YAML
YAML(Yet Another Markup Language) 파일은 경로, 클래스 및 기타 필수 세부 정보를 포함하여 데이터 세트 구성을 정의합니다. 패키지 분할 데이터 세트의 경우, package-seg.yaml 파일은 다음 위치에서 관리됩니다. https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/package-seg.yaml.
ultralytics/cfg/datasets/package-seg.yaml
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Package-seg dataset by Ultralytics
# Documentation: https://docs.ultralytics.com/datasets/segment/package-seg/
# Example usage: yolo train data=package-seg.yaml
# parent
# ├── ultralytics
# └── datasets
# └── package-seg ← downloads here (103 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: package-seg # dataset root dir
train: images/train # train images (relative to 'path') 1920 images
val: images/val # val images (relative to 'path') 89 images
test: images/test # test images (relative to 'path') 188 images
# Classes
names:
0: package
# Download script/URL (optional)
download: https://github.com/ultralytics/assets/releases/download/v0.0.0/package-seg.zip
사용법
이미지 크기 640으로 패키지 분할 데이터셋에서 100 에폭 동안 Ultralytics YOLO26n 모델을 훈련하려면 다음 코드 스니펫을 사용할 수 있습니다. 사용 가능한 인수에 대한 포괄적인 목록은 모델 훈련 페이지를 참조하십시오.
훈련 예제
from ultralytics import YOLO
# Load a model
model = YOLO("yolo26n-seg.pt") # load a pretrained segmentation model (recommended for training)
# Train the model on the Package Segmentation dataset
results = model.train(data="package-seg.yaml", epochs=100, imgsz=640)
# Validate the model
results = model.val()
# Perform inference on an image
results = model("path/to/image.jpg")
# Load a pretrained segmentation model and start training
yolo segment train data=package-seg.yaml model=yolo26n-seg.pt epochs=100 imgsz=640
# Resume training from the last checkpoint
yolo segment train data=package-seg.yaml model=path/to/last.pt resume=True
# Validate the trained model
yolo segment val data=package-seg.yaml model=path/to/best.pt
# Perform inference using the trained model
yolo segment predict model=path/to/best.pt source=path/to/image.jpg
샘플 데이터 및 주석
패키지 분할 데이터 세트는 다양한 관점에서 캡처한 다양한 이미지 컬렉션으로 구성됩니다. 아래는 데이터 세트의 데이터 인스턴스와 해당 분할 마스크가 함께 제공됩니다.
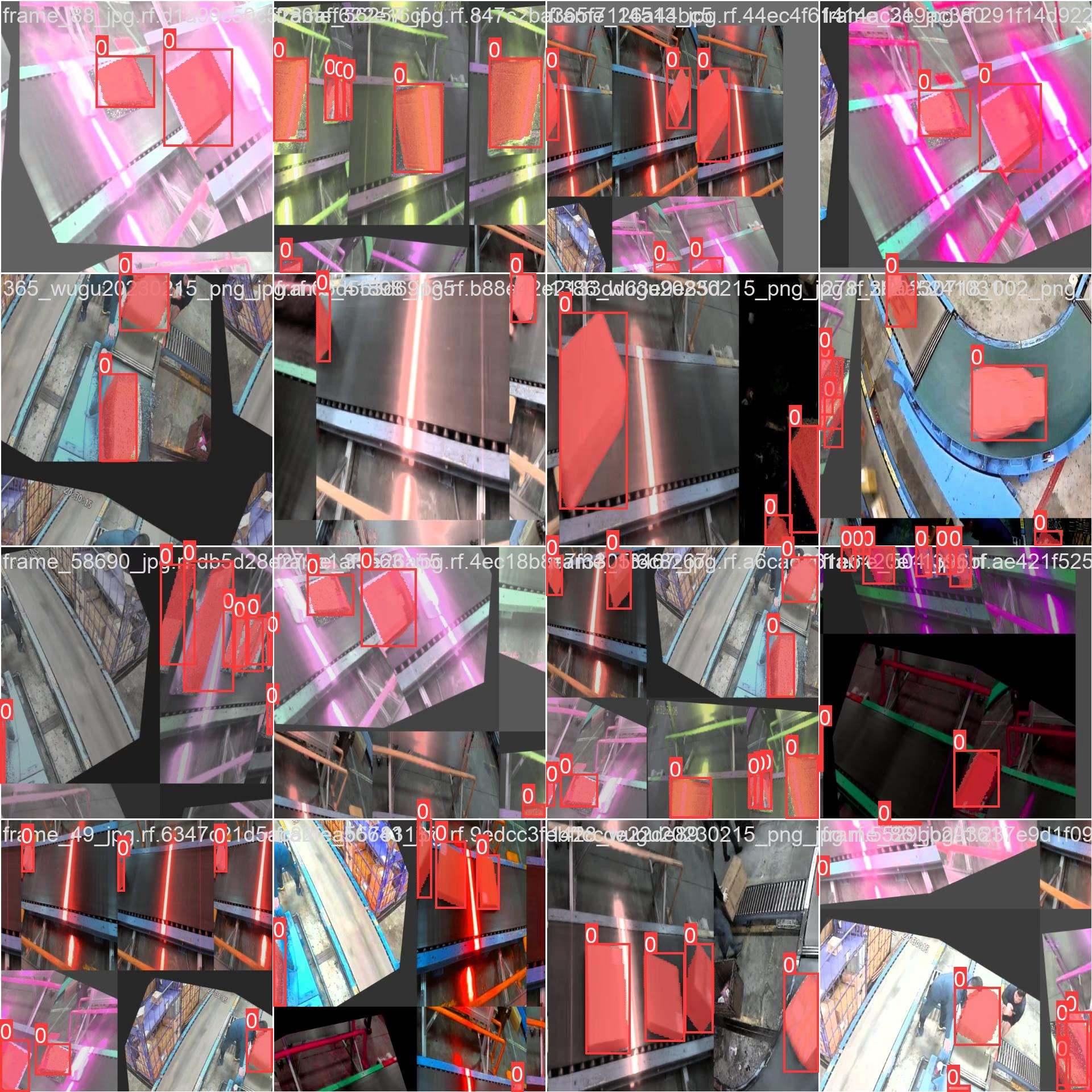
- 이 이미지는 인식된 패키지 객체를 윤곽선으로 표시하는 주석 처리된 마스크를 특징으로 하는 패키지 분할의 인스턴스를 보여줍니다. 데이터 세트에는 다양한 위치, 환경 및 밀도에서 촬영한 다양한 이미지 모음이 통합되어 있습니다. 이 분할 작업에 특정한 모델을 개발하기 위한 포괄적인 리소스로 사용됩니다.
- 이 예는 데이터 세트에 존재하는 다양성과 복잡성을 강조하며, 패키지 분할과 관련된 컴퓨터 비전 작업에 고품질 데이터가 중요하다는 점을 강조합니다.
패키지 분할에 YOLO26 사용의 이점
Ultralytics YOLO26은 패키지 분할 작업에 여러 가지 이점을 제공합니다.
속도 및 정확도 균형: YOLO26은 높은 정밀도와 효율성을 달성하여 빠르게 변화하는 물류 환경에서 실시간 추론에 이상적입니다. 이는 YOLOv8과 같은 모델에 비해 강력한 균형을 제공합니다.
적응성: YOLO26으로 훈련된 모델은 어두운 조명부터 복잡한 공간까지 다양한 창고 조건에 적응하여 견고한 성능을 보장할 수 있습니다.
확장성: 휴가철과 같은 성수기 동안 YOLO26 모델은 성능이나 정확도를 저하시키지 않으면서 증가하는 패키지 물량을 효율적으로 처리할 수 있습니다.
통합 기능: YOLO26은 기존 창고 관리 시스템과 쉽게 통합될 수 있으며, ONNX 또는 TensorRT와 같은 형식을 사용하여 다양한 플랫폼에 배포될 수 있어, 엔드투엔드 자동화 솔루션을 용이하게 합니다.
인용 및 감사의 말씀
Package Segmentation 데이터 세트를 연구 또는 개발 이니셔티브에 통합하는 경우, 출처를 적절히 인용하십시오:
@misc{ factory_package_dataset,
title = { factory_package Dataset },
type = { Open Source Dataset },
author = { factorypackage },
url = { https://universe.roboflow.com/factorypackage/factory_package },
year = { 2024 },
month = { jan },
note = { visited on 2024-01-24 },
}
컴퓨터 비전 커뮤니티에 기여해 주신 Package Segmentation 데이터 세트 제작자에게 감사를 표합니다. 데이터 세트 및 모델 학습에 대한 추가 탐색은 Ultralytics 데이터 세트 페이지와 모델 학습 팁 가이드를 참조하십시오.
FAQ
패키지 분할 데이터 세트는 무엇이며 컴퓨터 비전 프로젝트에 어떻게 도움이 됩니까?
- 패키지 분할 데이터 세트는 패키지 이미지 분할과 관련된 작업에 맞게 조정된 이미지의 선별된 컬렉션입니다. 다양한 컨텍스트에서 패키지의 다양한 이미지를 포함하므로 분할 모델을 훈련하고 평가하는 데 매우 중요합니다. 이 데이터 세트는 물류, 창고 자동화 및 정확한 패키지 분석이 필요한 모든 프로젝트의 애플리케이션에 특히 유용합니다.
패키지 분할 데이터셋으로 Ultralytics YOLO26 모델을 어떻게 훈련하나요?
- Ultralytics YOLO26 모델은 python 및 CLI 메서드를 모두 사용하여 훈련할 수 있습니다. 사용법 섹션에 제공된 코드 스니펫을 사용하십시오. 인수 및 구성에 대한 자세한 내용은 모델 훈련 페이지를 참조하십시오.
패키지 분할 데이터 세트의 구성 요소는 무엇이며, 구조는 어떻게 되어 있나요?
- 이 데이터 세트는 세 가지 주요 구성 요소로 구성됩니다:
- 학습 세트: 어노테이션이 있는 1920개의 이미지를 포함합니다.
- 테스트 세트: 해당 어노테이션이 있는 89개의 이미지로 구성됩니다.
- 검증 세트: 어노테이션이 있는 188개의 이미지를 포함합니다.
- 이 구조는 모델 평가 가이드에 설명된 모범 사례에 따라 철저한 모델 학습, 검증 및 테스트를 위한 균형 잡힌 데이터 세트를 보장합니다.
패키지 분할 데이터셋과 함께 Ultralytics YOLO26을 사용해야 하는 이유는 무엇인가요?
- Ultralytics YOLO26은 실시간 object detection 및 분할 작업에 최첨단 정확도와 속도를 제공합니다. 패키지 분할 데이터셋과 함께 사용하면 YOLO26의 정밀한 패키지 분할 기능을 활용할 수 있으며, 이는 물류 및 창고 자동화와 같은 산업에 특히 유용합니다.
패키지 분할 데이터셋을 위한 package-seg.yaml 파일에 어떻게 접근하고 사용할 수 있나요?
- 에 지정되어 있습니다.
package-seg.yaml파일은 Ultralytics의 GitHub 저장소에서 호스팅되며 데이터 세트의 경로, 클래스 및 구성에 대한 필수 정보가 포함되어 있습니다. 다음 위치에서 보거나 다운로드할 수 있습니다. https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/package-seg.yaml이 파일은 데이터세트를 효율적으로 활용하도록 모델을 구성하는 데 매우 중요합니다. 더 많은 정보와 실제 예제는 다음을 참조하십시오. Python 사용법 섹션에서 확인할 수 있습니다.






