Exportation DEEPX pour les modèles Ultralytics YOLO#
Le déploiement de modèles de vision par ordinateur sur du matériel NPU spécialisé nécessite un format de modèle compatible et optimisé. Exporter des modèles Ultralytics YOLO au format DEEPX permet une inférence efficace quantifiée en INT8 sur les accélérateurs NPU DEEPX. Ce guide t'accompagne dans la conversion de tes modèles YOLO au format DEEPX et dans leur déploiement sur du matériel motorisé par DEEPX.
Qu'est-ce que DEEPX ?#
DEEPX est une entreprise de semi-conducteurs spécialisée dans l'IA, axée sur les unités de traitement neuronal (NPUs) conçues pour une inférence d'apprentissage profond économe en énergie en périphérie. Les NPUs de DEEPX sont conçus pour les applications d'IA industrielles et embarquées exigeantes, offrant un débit élevé avec une consommation d'énergie minimale. Leur matériel est parfaitement adapté aux scénarios de déploiement où la connectivité cloud est peu fiable ou indésirable, comme la robotique, les caméras intelligentes et les systèmes d'automatisation industrielle.
Format d'exportation DEEPX#
L'exportation DEEPX produit un binaire de modèle compilé .dxnn optimisé pour une exécution sur le matériel NPU DEEPX. Le pipeline de compilation utilise la boîte à outils dx_com pour effectuer la quantification INT8 et l'optimisation spécifique au matériel, générant un répertoire de modèle autonome prêt pour le déploiement.
Principales caractéristiques des modèles DEEPX#
Les modèles DEEPX offrent plusieurs avantages pour le déploiement en périphérie :
- Quantification INT8 : Les modèles sont quantifiés en précision INT8 lors de l'exportation, réduisant significativement la taille du modèle et maximisant le débit du NPU. Apprends-en davantage sur la quantification de modèle.
- Optimisé pour NPU : Le format
.dxnnest spécifiquement compilé pour le matériel NPU DEEPX, tirant parti d'unités d'accélération dédiées pour une inférence rapide et efficace. - Faible consommation d'énergie : En déchargeant l'inférence vers le NPU, les modèles DEEPX consomment beaucoup moins d'énergie qu'une inférence CPU ou GPU équivalente.
- Précision basée sur l'étalonnage : L'exportation utilise un étalonnage basé sur EMA avec des images de jeu de données réelles pour minimiser la perte de précision lors de la quantification.
- Sortie autonome : Le répertoire du modèle exporté regroupe le binaire compilé, la configuration d'étalonnage et les métadonnées pour un déploiement simplifié.
Tâches prises en charge#
L'export DEEPX prend en charge les sept tâches d'Ultralytics. La segmentation sémantique et l'estimation de la profondeur ne sont disponibles qu'avec YOLO26, la seule famille qui intègre ces têtes.
| Tâche | YOLOv8 | YOLO11 | YOLO26 |
|---|---|---|---|
| Détecter | ✅ | ✅ | ✅ |
| Segmenter | ✅ | ✅ | ✅ |
| Sémantique | ❌ | ❌ | ✅ |
| Profondeur | ❌ | ❌ | ✅ |
| Classifier | ✅ | ✅ | ✅ |
| Pose | ✅ | ✅ | ✅ |
| OBB | ✅ | ✅ | ✅ |
Exporter vers DEEPX : Conversion de ton modèle YOLO#
Exporte un modèle Ultralytics YOLO au format DEEPX et lance l'inférence avec le modèle exporté.
L'exportation DEEPX n'est prise en charge que sur les machines Linux x86-64. ARM64 (aarch64) n'est pas pris en charge pour l'étape d'exportation. Cependant, les modèles dxnn exportés sont entièrement compatibles et exécutables sur des plateformes ARM64.
Installation#
Pour installer les paquets requis, exécute :
# Install the required package for YOLO
pip install ultralyticsLe paquet compilateur dx_com sera automatiquement installé depuis le dépôt du SDK DEEPX lors de la première exportation. Pour des instructions détaillées et les meilleures pratiques liées au processus d'installation, consulte notre guide d'installation Ultralytics. Si tu rencontres des difficultés lors de l'installation des paquets requis pour YOLO, consulte notre guide des problèmes courants pour des solutions et des conseils.
Utilisation#
Le format DEEPX prend en charge les modes Export, Predict et Validate. L'inférence et la validation s'exécutent sur le matériel NPU DEEPX. Exporte ton modèle, puis charge le modèle exporté pour lancer l'inférence ou valider sa précision.
from ultralytics import YOLO
# Load a YOLO26 model
model = YOLO("yolo26n.pt")
# Export the model to DEEPX format (quantize=8 is enforced automatically)
model.export(format="deepx") # creates 'yolo26n_deepx_model/'from ultralytics import YOLO
# Load the exported DEEPX model
model = YOLO("yolo26n_deepx_model")
# Run inference
results = model("https://ultralytics.com/images/bus.jpg")from ultralytics import YOLO
# Load the exported DEEPX model
model = YOLO("yolo26n_deepx_model")
# Validate accuracy on the COCO8 dataset
metrics = model.val(data="coco8.yaml")Arguments d'exportation#
| Argument | Type | Défaut | Description |
|---|---|---|---|
format | str | 'deepx' | Format cible pour le modèle exporté, définissant la compatibilité avec le matériel NPU DEEPX. |
imgsz | int ou tuple | 640 | Taille d'image souhaitée pour l'entrée du modèle. L'exportation DEEPX nécessite une entrée carrée — passe un entier (par ex. 640) ou un tuple où la hauteur est égale à la largeur. |
quantize | int ou str | 8/auto | Précision de quantification. 8 (INT8) est requis pour l'exportation DEEPX et activé automatiquement si non spécifié. Remplace les anciens indicateurs half/int8 désormais obsolètes. |
simplify | bool | True | Simplifie le graphe ONNX intermédiaire avec onnxslim. |
opset | int | None | Spécifie la version de l'opset ONNX pour le graphe ONNX intermédiaire. Si elle n'est pas définie, la dernière version prise en charge est utilisée. |
data | str | 'coco8.yaml' | Fichier de configuration de jeu de données utilisé pour l'étalonnage INT8. Spécifie la source d'image d'étalonnage. |
device | str | None | Spécifie le périphérique pour l'exportation : GPU (device=0) ou CPU (device=cpu). |
optimize | bool | False | Active une optimisation du compilateur plus élevée qui réduit la latence d'inférence et augmente le temps de compilation. |
Exécute toujours l'exportation DEEPX sur un hôte Linux x86-64. Le compilateur dx_com ne prend pas en charge ARM64.
Pour plus de détails sur le processus d'exportation, visite la page de documentation Ultralytics sur l'exportation.
Structure de sortie#
Après une exportation réussie, un répertoire de modèle est créé avec la structure suivante :
yolo26n_deepx_model/
├── yolo26n.dxnn # Compiled DEEPX model binary (NPU executable)
├── config.json # Calibration and preprocessing configuration
└── metadata.yaml # Model metadata (classes, image size, task, etc.)Le fichier .dxnn est le binaire du modèle compilé que le runtime dx_engine charge directement sur le NPU. Le fichier metadata.yaml contient les noms des classes, la taille de l'image et d'autres informations utilisées par le pipeline d'inférence Ultralytics.
Déploiement des modèles YOLO DEEPX exportés#
Une fois que tu as exporté avec succès ton modèle Ultralytics YOLO au format DEEPX, l'étape suivante consiste à déployer ces modèles sur le matériel NPU DEEPX.
Installation du runtime#
L'inférence nécessite le pilote NPU DEEPX, le runtime libdxrt et le paquet Python dx_engine.
Le runtime DEEPX prend en charge à la fois Linux x86-64 et ARM64 (par ex. Raspberry Pi 5).
# Install the NPU driver and libdxrt runtime
sudo apt update
wget https://github.com/DEEPX-AI/dx_rt_npu_linux_driver/raw/main/release/2.4.1/dxrt-driver-dkms_2.4.1-2_all.deb
sudo apt install ./dxrt-driver-dkms_2.4.1-2_all.deb
wget https://github.com/DEEPX-AI/dx_rt/raw/main/release/3.3.2/libdxrt_3.3.2_all.deb
sudo apt install ./libdxrt_3.3.2_all.deb
# Create dx-engine wheel
cd /usr/share/libdxrt/python_package && sudo ./make_whl.sh
# Install the bundled dx_engine Python wheel
pip install dx_engine-*.whlVérifie que le runtime est correctement installé avec dxrt-cli --version. Tu devrais voir une sortie similaire à :
DXRT v3.3.2
Minimum Driver Versions
Device Driver: v2.4.0
PCIe Driver: v2.2.0
Firmware: v2.5.2
Minimum Compiler Versions
Compiler: v1.18.1
.dxnn File Format: v6Une fois le runtime installé, exécute l'inférence et la validation sur ton périphérique DEEPX exactement comme indiqué dans la section Utilisation ci-dessus — le _deepx_model exporté se charge directement avec YOLO(...).
Visualisation avec dxtron#
dxtron est le visualiseur de graphe de DEEPX pour inspecter le modèle .dxnn compilé.
Installe dxtron sur Linux x86-64 en téléchargeant le paquet .deb depuis le SDK DEEPX et en l'installant via dpkg :
wget https://sdk.deepx.ai/release/dxtron/v2.0.1/dxtron_2.0.1_amd64.deb
sudo dpkg -i dxtron_2.0.1_amd64.debEnsuite, ouvre ton modèle exporté :
dxtron yolo26n_deepx_model/yolo26n.dxnndxtron est disponible pour les plateformes x86-64 et aarch64.
Benchmarks#
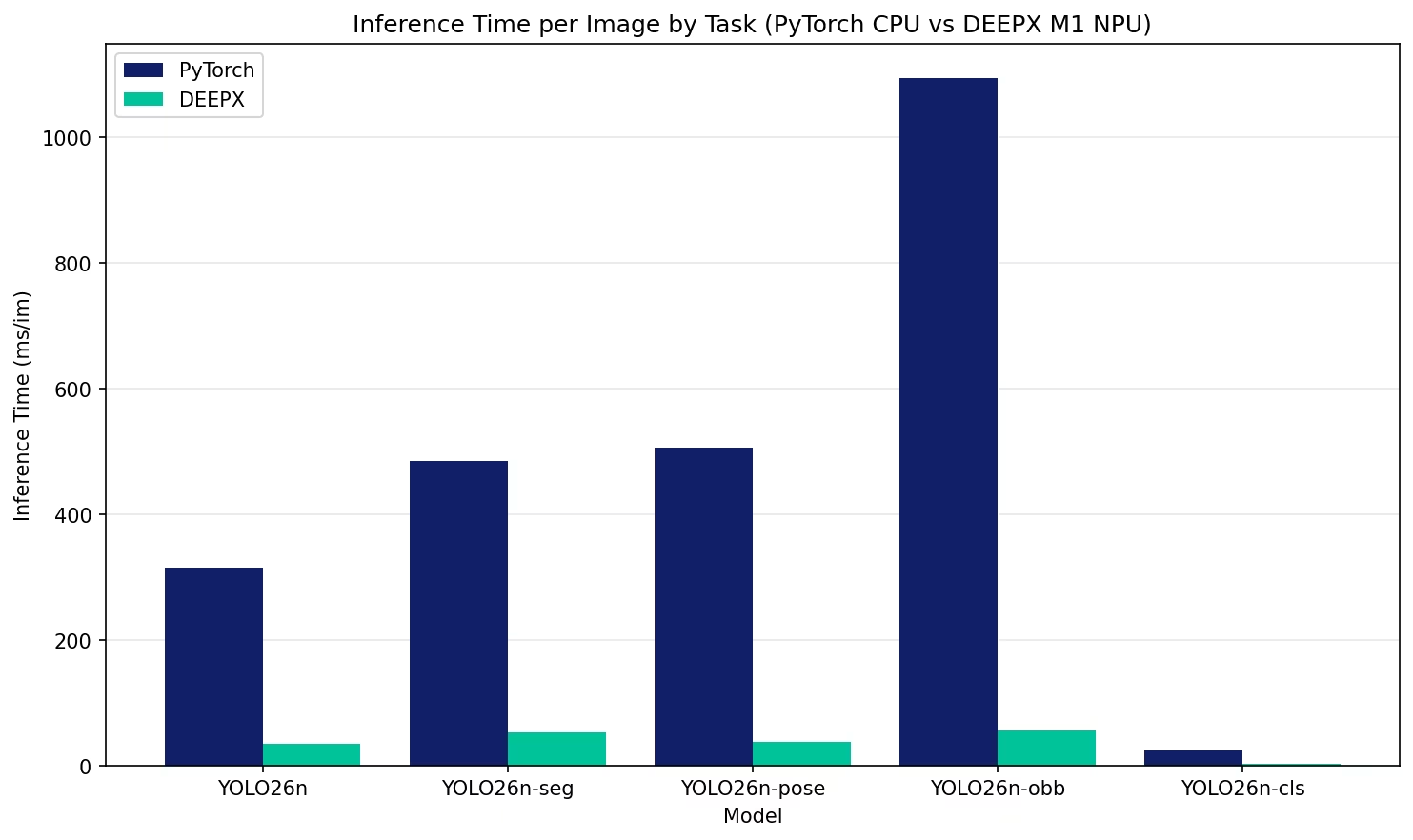
L'équipe Ultralytics a benchmarké les modèles YOLO26, en comparant la vitesse et la précision entre PyTorch et DEEPX.
| Modèle | Format | Statut | Taille (Mo) | métriques/mAP50-95(B) | Temps d'inférence (ms/im) |
|---|---|---|---|---|---|
| YOLO26n | PyTorch | ✅ | 5.3 | 0.4760 | 315.2 |
| YOLO26n | DEEPX | ✅ | 6.6 | 0.4660 | 34.6 |
| YOLO26n-seg | PyTorch | ✅ | 6.5 | 0.4080 | 485.4 |
| YOLO26n-seg | DEEPX | ✅ | 7.9 | 0.3920 | 53.8 |
| YOLO26n-pose | PyTorch | ✅ | 7.6 | 0.4230 | 506.3 |
| YOLO26n-pose | DEEPX | ✅ | 8.8 | 0.4590 | 37.6 |
| YOLO26n-obb | PyTorch | ✅ | 5.7 | 0.817 | 1094.4 |
| YOLO26n-obb | DEEPX | ✅ | 7.3 | 0.783 | 56.4 |
| Modèle | Format | Statut | Taille (Mo) | acc (top1) | acc (top5) | Temps d'inférence (ms/im) |
|---|---|---|---|---|---|---|
| YOLO26n-cls | PyTorch | ✅ | 5.6 | 0.431 | 0.716 | 23.8 |
| YOLO26n-cls | DEEPX | ✅ | 5.9 | 0,333 | 0,686 | 2.7 |
La validation des benchmarks ci-dessus a été effectuée en utilisant coco128 pour la détection, coco128-seg pour la segmentation, coco8-pose pour l'estimation de pose, imagenet100 pour la classification et dota128 pour les modèles OBB. Le temps d'inférence n'inclut pas le pré/post-traitement.
Pour obtenir le meilleur débit d'inférence à partir du NPU DX-M1 connecté à un Raspberry Pi 5, ouvre le fichier de configuration de démarrage et active la prise en charge de PCIe Gen 3.
sudo nano /boot/firmware/config.txtAjoute les lignes suivantes à la fin du fichier :
dtparam=pciex1
dtparam=pciex1_gen=3Enregistre et quitte (Ctrl+X, puis Y, puis Entrée), puis redémarre :
sudo rebootVérifie la génération PCIe. La vitesse attendue est de 8GT/s pour PCIe Gen3.
sudo lspci -vvv | grep -iA 33 accelerators | grep -E "LnkCap|LnkSta"Flux de travail recommandé#
- Entraîne ton modèle en utilisant le Mode Entraînement d'Ultralytics
- Exporte au format DEEPX en utilisant
model.export(format="deepx") - Valide la précision avec
yolo valpour vérifier la perte de quantification minimale - Prédits en utilisant
yolo predictpour une validation qualitative - Déploie le répertoire
_deepx_model/exporté sur le matériel NPU DEEPX en utilisant l'exécutiondx_engine
Applications concrètes#
Les modèles YOLO déployés sur le matériel NPU DEEPX sont bien adaptés à une large gamme d'applications d'IA embarquée :
- Surveillance intelligente : détection d'objets en temps réel pour les systèmes de sécurité et de surveillance avec une faible consommation d'énergie et aucune dépendance au cloud.
- Automatisation industrielle : contrôle qualité sur l'appareil, détection de défauts et surveillance de processus dans des environnements d'usine.
- Robotique : navigation basée sur la vision, évitement d'obstacles et reconnaissance d'objets sur des robots et drones autonomes.
- Smart Agriculture : surveillance de la santé des cultures, détection des parasites et estimation du rendement grâce à la computer vision in agriculture.
- Analyse de vente au détail : analyse du flux client, surveillance des rayons et suivi des stocks avec une inférence en temps réel sur l'appareil.
Résumé#
Dans ce guide, tu as appris comment exporter des modèles Ultralytics YOLO au format DEEPX et les déployer sur le matériel NPU DEEPX. Le pipeline d'exportation utilise la calibration INT8 et le compilateur dx_com pour produire un binaire .dxnn optimisé pour le matériel, tandis que l'exécution dx_engine gère l'inférence sur l'appareil.
La combinaison d'Ultralytics YOLO et de la technologie NPU de DEEPX offre une solution efficace pour exécuter des charges de travail avancées de vision par ordinateur sur des appareils intégrés et embarqués, offrant un débit élevé avec une faible consommation d'énergie pour les applications en temps réel.
Pour plus de détails sur l'utilisation, visite le site officiel de DEEPX.
De plus, si tu souhaites en savoir plus sur d'autres intégrations d'Ultralytics YOLO, visite notre page de guide d'intégration. Tu y trouveras de nombreuses ressources et idées utiles.
FAQ#
Comment exporter mon modèle Ultralytics YOLO au format DEEPX ?#
Tu peux exporter ton modèle en utilisant la méthode export() en Python ou via la CLI. L'exportation active automatiquement la quantification INT8 et utilise un jeu de données de calibration pour minimiser la perte de précision. Le package du compilateur dx_com est installé automatiquement s'il n'est pas déjà présent.
from ultralytics import YOLO
model = YOLO("yolo26n.pt")
model.export(format="deepx")Pourquoi l'exportation DEEPX nécessite-t-elle une quantification INT8 ?#
Les NPU DEEPX sont conçus pour exécuter des calculs INT8 avec une efficacité maximale. Le compilateur dx_com quantifie le modèle lors de l'exportation en utilisant un étalonnage basé sur EMA avec des images de jeu de données réelles, permettant au NPU de fournir ses pleines performances. INT8 est toujours appliqué pour les exportations DEEPX — si tu demandes une précision différente, elle sera remplacée par une valeur par défaut accompagnée d'un avertissement.
Quelles plateformes sont prises en charge pour l'exportation DEEPX ?#
L'exportation (compilation) de modèle DEEPX nécessite un hôte x86-64 Linux. L'étape d'exportation n'est pas prise en charge sur les machines ARM64 (aarch64) et Windows. L'inférence utilisant le modèle .dxnn exporté peut être exécutée sur n'importe quelle plateforme Linux (x86-64 et ARM64) prise en charge par l'exécution dx_engine.
Quel est le résultat d'une exportation DEEPX ?#
L'exportation crée un répertoire (par exemple, yolo26n_deepx_model/) contenant :
yolo26n.dxnn— le binaire NPU compiléconfig.json— paramètres de calibration et de prétraitementmetadata.yaml— métadonnées du modèle, y compris les noms des classes et la taille de l'image
Puis-je déployer des modèles entraînés personnalisés sur le matériel DEEPX ?#
Oui. Tout modèle entraîné avec le mode d'entraînement d'Ultralytics et exporté avec format="deepx" peut être déployé sur du matériel NPU DEEPX, à condition qu'il utilise des opérations de couche prises en charge. L'exportation prend en charge les sept tâches d'Ultralytics : la détection, la segmentation d'instance, la segmentation sémantique, l'estimation de profondeur, la classification, l'estimation de pose et la boîte englobante orientée (OBB).
Combien d'images de calibration dois-je utiliser pour l'exportation DEEPX ?#
Le pipeline d'exportation DEEPX utilise chaque image du jeu de données de calibration avec la méthode de calibration EMA. Quelques centaines d'images sont généralement suffisantes pour une bonne précision de quantification. Pointe data vers un jeu de données plus petit si le temps de compilation devient une préoccupation sur de grands jeux de données.
Comment installer l'exécution DEEPX pour l'inférence ?#
L'exécution DEEPX n'est pas fournie avec ultralytics et doit être installée séparément avant d'exécuter l'inférence. Sur les machines Linux x86-64 et ARM64 (par exemple, Raspberry Pi 5), installe le pilote NPU (dxrt-driver-dkms) et l'exécution (libdxrt) depuis les versions GitHub de DEEPX-AI, puis installe la roue Python dx_engine fournie. Voir la section Installation de l'exécution ci-dessus pour les commandes étape par étape.